На самом деле, хотелось написать понятную статью о человеческом восприятии окружающего мира, но вот решила начать с роботов ))
Привет, я робот!

Центральный процессор робота не воспринимает мир непосредственно. Но у робота есть множество датчиков, которые воспринимают воздействия внешней среды (свет, звук, вибрацию и т.п.). У каждого датчика есть некоторый ограниченный диапазон, который он может воспринимать. Все, что собирается датчиками, превращается в набор электрических импульсов — массивы данных (на рисунке обозначены голубыми стрелками), которые и попадают в центральный процессор робота.
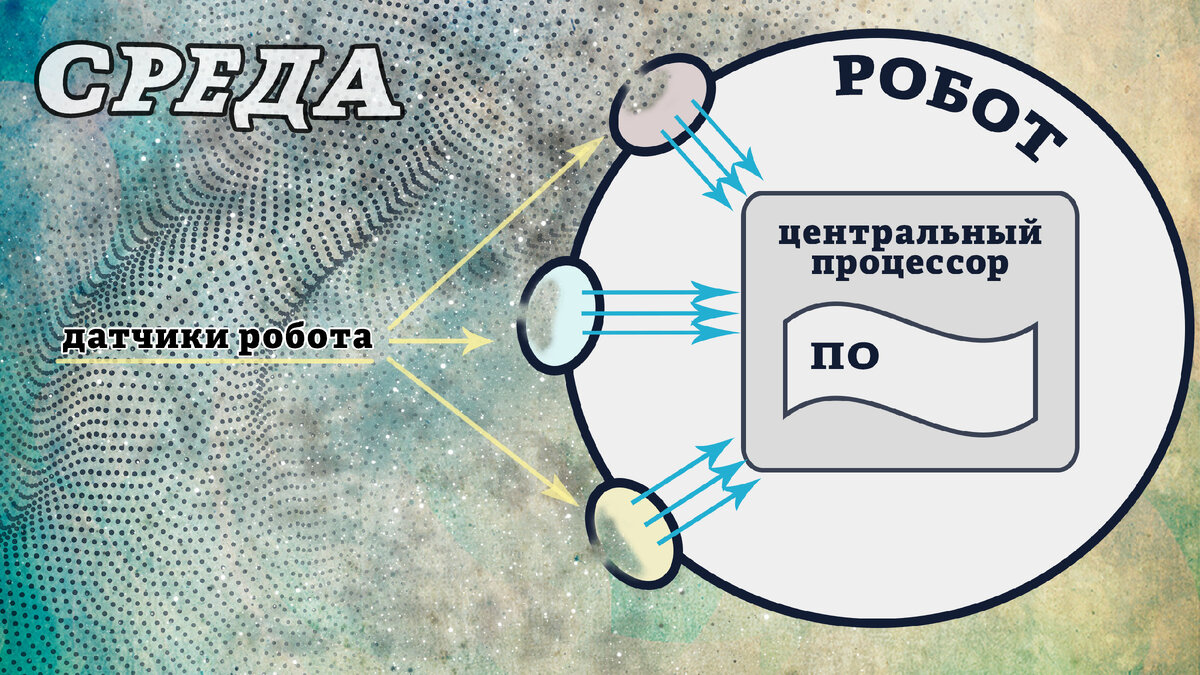
Важно, что в центральный процессор не попадают звук, свет и т.д., а приходят цифровые массивы данных — этакие "образы" того, что есть во внешней среде.
Программное обеспечение (ПО) робота позволяет различать и классифицировать разные последовательности данных, например, определять, что вот такая последовательность означает, что к роботу подошел человек, другая последовательность — что человек смотрит на него и говорит "Привет!"
Для этого в ПО загружено множество готовых паттернов (конечно, не картинки, а оцифрованные массивы данных), с которыми непрерывно сравнивается информация, приходящая от датчиков. На основе результатов этого сравнения производится классификация "образов", полученных из внешней среды.
Искажения при получении и обработке информации
1. Датчики робота не могут воспринять абсолютно все, что есть во внешней среде. Их возможности очень ограничены. Например, камера робота воспринимает электромагнитное излучение (свет) в узком частотном диапазоне и не сможет зафиксировать потоки, интенсивность которых ниже или выше определенных значений.
2. Преобразование входящих потоков в электрические импульсы, естественно, тоже имеет свою погрешность.
3. Распознавание образов, сравнение их с паттернами, загруженными в ПО, не всегда проходит гладко, тут тоже возможны ошибки.
Почему я пишу о роботах? Потому что человек воспринимает мир весьма похожим образом, но об этом в следующей статье.