Кулачковые механизмы содержат кулачок, стойку и исполнительное звено (толкатель). Кулачок 1 является входным звеном, толкатель 2 – выходным. Иногда кулачок называют копиром. Наиболее распространены механизмы с вращающимся кулачком (рис. 6.1, а, б, в, г, е). По типу толкателя наиболее известны кулачковые механизмы с коромысловым (рис. 6.1, а, г), стержневым (рис. 6.1, б, д), тарельчатым (рис. 6.1, в) и периодически поворачивающимся (рис. 6.1, е) толкателем. По типу кулачков наиболее известны механизмы с плоским вращающимся (рис. 6.1, а, б, в, г), поступательно движущимся (рис. 6.1, д) и пространственным вращающимся (цилиндрическим) кулачком (рис. 6.1, е).
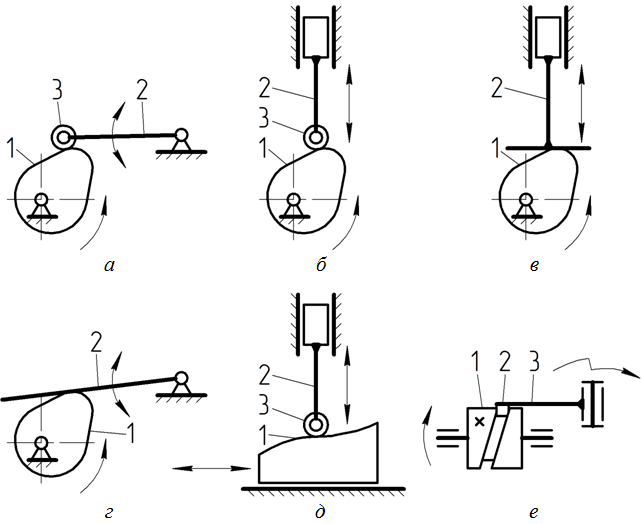
Ведущее звено механизма – кулачок – совершает движение с постоянной частотой. Толкатель механизма двигается по заданному закону движения – с различной скоростью, периодически меняя направление (кроме механизма на рис. 6.1, е).
На сегодняшний день кулачковые механизмы во многом вытеснены сервоприводами – программируемыми электротехническими устройствами. Тем не менее, кулачковые механизмы актуальны при разработке единиц оборудования, работающих в условиях отсутствия электричества (кулачки распределительных валов, приводов сельскохозяйственных машин).
Преимуществами кулачковых механизмов являются:
- малое количество деталей;
- простота проектирования;
- воспроизведение законов движения с выстоями – неизменными положениями толкателя во время постоянного вращения кулачка.
Недостатки кулачковых механизмов:
- сравнительно высокое трение;
- сравнительно невысокая нагрузочная способность.
Для снижения трения при работе механизмов на рис. 6.1, а, б, д, е, на конец толкателя устанавливают ролик 3.
Постоянство контакта кулачка 1 и толкателя 2 является необходимым условием для работы механизма. Для этого используют геометрическое замыкание (рис. 6.2, а) в виде паза на кулачке под ролик 3 или силовое замыкание (рис. 6.2, б) с помощью пружины.
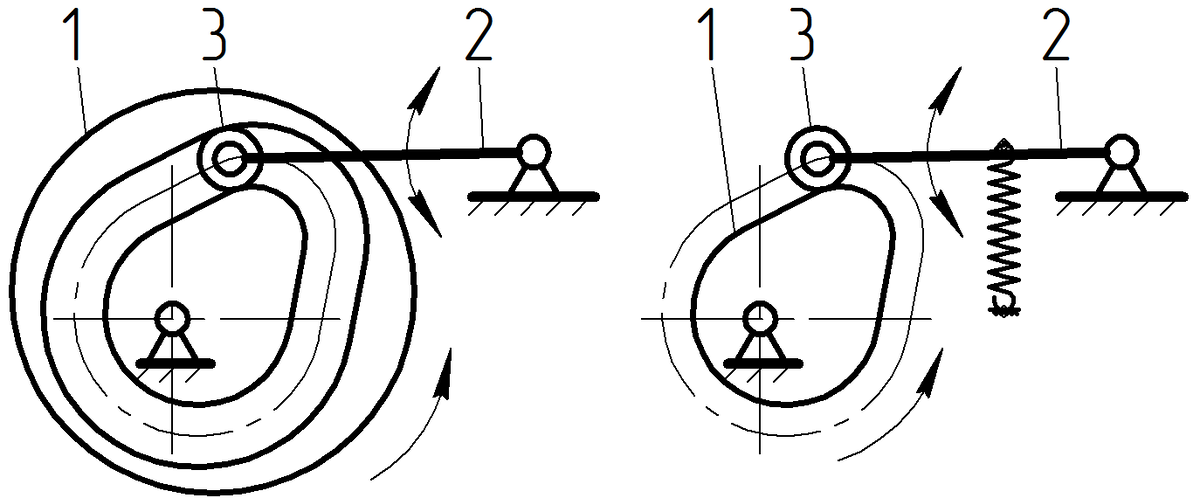
На рис. 6.2 практический профиль кулачка отстоит на величину радиуса ролика от теоретического профиля (показан штрихпунктирной линией).
Для синтеза кулачкового механизма следует задать закон движения. Наиболее известны следующие законы движения: синусоидальный (рис. 6.3, а), косинусоидальный (рис. 6.3, б), равноубывающий (рис. 6.3, в), ступенчатый (рис. 6.3, г) и линейный (рис. 6.3, д). Обозначения на рис. 6.3:
- φ – угол поворота кулачка, рад (град);
- ψ – угол размаха коромысла, рад (град);
- ψ` – аналог скорости коромысла;
- ψ`` – аналог ускорения коромысла,
для кулачковых механизмов со стержневым или тарельчатым толкателем обозначения расшифровываются:
- S – перемещение толкателя, мм;
- S` – аналог скорости толкателя, мм;
- S`` – аналог ускорения толкателя, мм.
Графики на рис. 6.3 содержат интервалы:
- φп – подъема толкателя, рад (град);
- φвв – верхнего выстоя толкателя, рад (град);
- φо – опускания толкателя, рад (град).
Поскольку полный поворот кулачка составляет 360°, а сумма углов φп, φвв и φо меньше либо равна 360°, оставшийся интервал поворота кулачка (в случае, когда сумма углов меньше 360°) является интервалом нижнего выстоя φнв (на рис. 6.3 этот интервал не показан). Возможно также более одного цикла движений толкателя за один оборот кулачка.
Для построения аналога ускорения синусоидального, косинусоидального, равноубывающего и ступенчатого законов движения следует задать амплитуду Aо и рассчитать амплитуду Aп
Аналог ускорения на рис. 6.3, а, может быть построен путем представления его синусоиды на заданном интервале:
где 4 – количество делений полной синусоиды на графике; k – порядковый номер деления. На второй половине интервала φп и на интервале φо синусоида строится аналогичным образом, используя номера делений от 1 до 4.
Аналог скорости строится путем графического интегрирования аналога ускорения. О реализации такого метода было рассказано ранее в описании к рис. 5.7. Следует еще раз отметить, что метод графического интегрирования характеризуется низкой точностью и может использоваться только в образовательных целях.
При синтезе кулачковых механизмов построение аналогов ускорения и скорости наиболее целесообразно выполнять по точным аналитическим зависимостям. Так, для синусоидального закона движения (рис. 6.3, а) аналог ускорения на интервале подъема согласно [1]
Для построения аналога скорости ψ` (или S`) следует проинтегрировать зависимость (6.3) по углу φ
Для построения функции перемещения ψ (или s) следует проинтегрировать зависимость (6.4) по углу φ
Константа интегрирования C2 здесь будет равняться 0. О расчете константы C1 будет сказано ниже в примере №1.
Для косинусоидального закона движения (рис. 6.3, б) аналог ускорения на интервале подъема [1]
Аналог скорости после первого интегрирования и функция перемещения после второго:
Константа интегрирования C1 здесь будет равняться 0. О расчете константы C2 будет сказано ниже в примере №2.
Для равноубывающего закона движения (рис. 6.3, в) аналог ускорения на интервале подъема [1]
Аналог скорости после первого интегрирования и функция перемещения после второго:
Константы С1 и С2 здесь равняются 0.
Для ступенчатого закона движения (рис. 6.3, г) аналог ускорения на интервале подъема [1]
Аналог скорости после первого интегрирования и функция перемещения после второго:
Константы С1 и С2 здесь равняются 0.
Поскольку аналог скорости на рис. 6.3, г, является симметричной функцией, зависимости (6.13) и (6.14) справедливы только для интервала от 0 до 4 по оси абсцисс. Для определения значений аналога скорости и функции перемещения на интервале от 4 до 8 зависимости (6.13) и (6.14) примут следующий вид:
где ψ4` – значение аналога скорости в положении 4; φ4 и φ8 – значение угла поворота кулачка в положениях 4 и 8, рад; ψ4 – значение функции перемещения в положении 4, рад.
Для линейного закона движения (рис. 6.3, д) построение графиков можно начать с функции перемещения [1]
Аналог скорости и аналог ускорения после дифференцирования
Линейный закон движения (рис. 6.3, д) не рекомендуется использовать на практике, поскольку на переходных участках (0, 8, 8`, 16) наблюдается скачок ускорения до значения плюс/минус бесконечность. В действительности достижение таких значений невозможно, однако при работе механизма будут наблюдаться жесткие удары. Таким образом, рекомендуется использование безударных законов, таких как синусоидальный, а также законов с мягкими ударами: косинусоидального, равноубывающего, ступенчатого.
Следует отметить, что все приведенные выше зависимости составлены для интервала подъема φп. Для расчета кинематических параметров на остальных интервалах могут использоваться те же зависимости с заменой в них φп на φо и изменением начала отсчета угла поворота кулачка φ. Например, при синусоидальном законе аналог ускорения и аналог скорости будут определяться:
а значения функции перемещения на интервале опускания при одном и том же законе движения равны значениям на интервале подъема.
В случае графического интегрирования кинематических диаграмм следует определить масштабные коэффициенты.
Масштабный коэффициент функции перемещения для кулачковых механизмов с коромысловым толкателем µψ, град/мм, и для кулачковых механизмов со стержневым толкателем µs, мм/мм
где <µmax>, <Smax> – величина µmax (Smax) на чертеже.
Выражение (6.20) в радианной мере, рад/мм
Масштабные коэффициенты аналогов скорости и ускорения будут определяться µψ’, µψ’’, 1/мм (µs’, µs’’ мм/мм):
где µφ - масштабный коэффициент оси φ, рад/мм (формула ниже, в которой <φп> – величина отрезка φп на чертеже); op` и op`` – полюсные расстояния, мм.
В учебных целях и в некоторых практических случаях отрезки φп и φо допускается делить на 8 или 10 частей. Данные, полученные в результате интегрирования, следует заносить в таблицу, выполненную по типу табл. 1-3.
Пример 1. Кулачковый механизм с коромысловым толкателем (рис. 6.1, а); синусоидальный закон движения (рис. 6.3, а). Исходные данные: φп = 90° (1,5707 рад), φвв = 35° (0,6109 рад), φо = 140° (2,4435 рад), ψ = 40° (0,6981 рад), L = 100 мм (длина коромысла).
При графическом интегрировании величину Ао следует принимать в районе 20...40 мм, а величину Ап – вычислять по формуле (6.1). Однако при графоаналитическом методе синтеза для синусоидального закона движения величину Ао можно принять равной [1]
Для рассматриваемого примера
Величина Ап по формуле (6.1)
Аналог ускорений, аналог скорости и функция перемещения, найденные по формулам (6.3), (6.4), (6.5), (6.18), (6.19) и графикам на рис. 6.3, а, занесены в табл. 1. Константы интегрирования С1 для зависимостей (6.4) и (6.5) рассчитывались с учетом того, чтобы график аналога скорости на рис. 6.3, а, начинался из 0, то есть
откуда (для синусоидального закона движения)
На интервале опускания
Следующим этапом синтеза кулачкового механизма является определение основных размеров. Для кулачкового механизма с коромысловым толкателем межосевое расстояние и минимальный радиус теоретического профиля кулачка подбираются из условия незаклинивания
где υ и [υ] – текущий и допускаемый углы давления, град.
Для кулачковых механизмов с коромысловым толкателем допускаемые углы давления на интервалах подъема [υп] и опускания [υо]:
Для соблюдения этих условий необходимо построить диаграмму определения основных размеров кулачкового механизма (рис. 6.4) S`(ψ), где S` = L× ψ` (L – длина коромысла, мм). Для построения используются исходные данные и данные табл. 2.
Для определения области допускаемых значений следует из крайних точек диаграммы, например 3, 4, 12, 13, 14 провести лучи под допускаемым углом передачи движения на интервалах подъема и опускания
Пересечение этих лучей создаст границу области допускаемых значений (на рис. 6.4 она заштрихована), где должен находиться центр вращения кулачка.
Следует помнить, что чем центр вращения кулачка будет ближе к вершине этой области, тем выше будут углы давления, но тем меньше будут размеры кулачка. По мере удаления от вершины области допускаемых значений размеры кулачка увеличиваются, а углы давления уменьшаются.
Для рассматриваемого примера можно выбрать минимальный радиус теоретического профиля кулачка Rо = 55 мм, межосевое расстояние Lо = 140 мм.
Для построения графика угла давления (рис. 6.4) следует соединить точки диаграммы с точкой О и замерить углы γi. Угол давления можно будет рассчитать по формуле
после чего – построить график υ(φ).
Для кулачкового механизма с коромысловым толкателем угол давления можно рассчитать по следующей формуле
Построение профиля кулачка (рис. 6.5) осуществляется методом обращенного движения.
1. Намечается точка О, проводятся окружности радиусом Lо и Rо.
2. Окружность радиуса Lо разбивается на интервалы φп, φвв и φо.
3. Строится начальное (AоBо) и конечное положения коромысла, которые соединяются дугой; на дуге отмечаются другие положения коромысла, то есть выполняется то же, что и при построении диаграммы на рис. 6.4.
4. Окружность радиуса Lо на интервалах φп и φп делится на 8 частей.
5. Из центра О через каждую точку на дуге перемещения коромысла проводится окружность, а из каждой одноименной точки на окружности Lо проводится отрезок, равный длине коромысла, до пересечения с одноименной окружностью.
6. Плавным обведением построенных точек получается теоретический профиль кулачка.
7. Из условия соседства звеньев (6.31) и условия незаострения профиля кулачка (6.32) подбирается радиус ролика
где ρmin – минимальный радиус кривизны теоретического профиля, мм.
Для рассматриваемого примера по зависимости (6.31) был принят радиус ролика Rрол = 16,5 мм.
8. В каждой точке теоретического профиля и между ними прочерчивается ролик; практический профиль кулачка является эквидистантой к теоретическому профилю, отстоящему на величину радиуса ролика Rрол.
Выполненный профиль кулачка (рис. 6.5) характеризуется отсутствием заострений. В результате, проверка условия (6.32) не требуется.
Пример 2. Кулачковый механизм со стержневым толкателем (рис. 6.1, б); косинусоидальный закон движения (рис. 6.3, б). Исходные данные: φп = 130° (2,2689 рад), φвв = 30° (0,5236 рад), φо = 100° (1,7453 рад), S = 36 мм.
При графоаналитическом методе синтеза величину Ао можно принять по следующей формуле (для косинусоидального закона движения)
Величина Ап по формуле (6.1)
Аналог ускорений, аналог скорости и функцию перемещения для построения графиков на рис. 6.3, б, можно рассчитать по формулам (6.6), (6.7) и (6.8). Константа С2 интегрирования здесь составила 18. При таком значении функция перемещения на рис. 6.3, б, должна начинаться из 0:
откуда (для косинусоидального закона движения) [1]
Результаты расчетов сведены в табл. 2.
Следующим этапом синтеза кулачкового механизма является определение основных размеров. Здесь минимальный радиус теоретического профиля кулачка подбирается из того же условия незаклинивания (6.26).
Для кулачковых механизмов со стержневым толкателем допускаемые углы давления на интервалах подъема [υп] и опускания [υо] рекомендуется принимать
Для соблюдения этих условий необходимо построить диаграмму определения основных размеров кулачкового механизма (рис. 6.6) S`(S). Для построения используются данные табл. 2.
Для определения области допускаемых значений следует провести касательные под допускаемыми углами давления: слева под углом [υп], справа – под углом [υо]. На рис. 6.6 эти углы показаны с противоположных сторон.
Пересечение этих касательных создаст покажет границу области допускаемых значений (на рис. 6.6 она заштрихована), где должен находиться центр вращения кулачка.
Выбор точки O осуществляется по рекомендациям как и для кулачкового механизма с коромысловым толкателем. При этом для кулачкового механизма со стержневым толкателем точку O можно принимать с эксцентриситетом e.
Для профилируемого кулачка был выбран минимальный радиус теоретического профиля Rо = 40 мм и эксцентриситет e = 2 мм.
Для построения графика угла давления (рис. 6.6) следует соединить точки диаграммы с выбранным центром вращения кулачка (точкой О) и замерить углы υi. Кроме того, для кулачкового механизма со стержневым толкателем угол давления можно рассчитать по следующей формуле
Построение профиля кулачка (рис. 6.7) осуществляется методом обращенного движения.
- Намечается точка О на расстоянии e от вертикальной оси, из этой точки проводятся окружности радиусами e и Rо.
- На оси ординат, которая расположена сразу после окружности Rо, отмечаются положения толкателя 0...8 и 8'...16, как на рис. 6.6.
- Окружность радиуса Rо разбивается на интервалы φп, φвв и φо.
- Окружность радиуса Rо на интервалах φп и φо делится на 8 частей.
- Через каждую точку на окружности Rо проводится касательная к маленькой окружности радиусом e с одной стороны, а с другой стороны – эта касательная пересекается с дугой, проведенной из центра O через одноименную точку положения толкателя на оси ординат.
- Плавным обведением построенных точек получается теоретический профиль кулачка.
- Из условия незаострения (6.31) профиля кулачка подбирается радиус ролика. Для рассматриваемого примера по зависимости был принят радиус ролика Rрол = 12 мм.
- В каждой точке теоретического профиля и между ними показывается ролик; практический профиль кулачка является эквидистантой к теоретическому профилю, отстоящему на величину радиуса ролика Rрол.
Профиль кулачка (рис. 6.7) характеризуется отсутствием заострений, поэтому проверка условия (6.32) не требуется.
Пример 3. Кулачковый механизм с тарельчатым толкателем (рис. 6.1, в); равноубывающий закон движения (рис. 6.3, в). Исходные данные: φп = 100° (1,7453 рад), φвв = 40° (0,6981 рад), φо = 130° (2,2689 рад), S = 35 мм.
Величина Ао для равноубывающего закона движения [1]
Величина Ап по формуле (6.1)
Аналог ускорения, аналог скорости и функцию перемещения для построения графика на рис. 6.3, в, можно рассчитать по формулам (6.9), (6.10) и (6.11). Результаты расчетов сведены в табл. 3.
Следующим этапом синтеза кулачкового механизма является определение основных размеров. Для кулачкового механизма с тарельчатым толкателем минимальный радиус теоретического профиля кулачка подбирается из условия незаострения (выпуклости) профиля. Для этого следует по данным табл. 3 выполнить диаграмму S``(S) (рис. 6.8). К построенной диаграмме со стороны интервала опускания следует провести касательную по углом 45°. Пересечение касательной с осью ординат покажет границу, ниже которой находится область допускаемых значений минимальных радиусов теоретического профиля (заштрихована). При этом для кулачкового механизма с тарельчатым толкателем точку O можно принимать с эксцентриситетом e.
Для рассматриваемого примера был выбран минимальный радиус теоретического профиля кулачка Rо = 45 мм и эксцентриситет e = 8 мм.
Построение профиля кулачка (рис. 6.9) осуществляется методом обращенного движения.
Этапы построения.
- Намечается точка О на расстоянии e от вертикальной оси, из этой точки проводятся окружности радиусами e и Rо.
- На оси ординат, которая расположена сразу после окружности Rо, отмечаются положения толкателя 0...8 и 8'...16, как на рис. 6.8.
- Окружность радиуса Rо разбивается на интервалы φп, φвв и φо.
- Окружность радиуса Rо на интервалах φп и φо делится на 8 частей.
- Через каждую точку на окружности Rо проводится касательная к маленькой окружности радиусом e с одной стороны, а с другой стороны – эта касательная пересекается с дугой, проведенной из центра O через одноименную точку положения толкателя на оси ординат. Из последней точки пересечения перпендикулярно к касательной в обе стороны проводятся линии, показывающие плоскость тарелки.
- Теоретический профиль кулачка получается путем плавного соединения нормалей к плоскости тарелки.
[1] Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. – 6-е изд., стереотипное. – М.: ИД Альянс, 2011. – 640 с.