Уже с начала лета 2023 появилась заготовка для этого проекта. В дальнейшем планируется усовершенствование базы и замена деталей, вырезанных вручную, на 3D печать и фрезерование.
На данный момент:
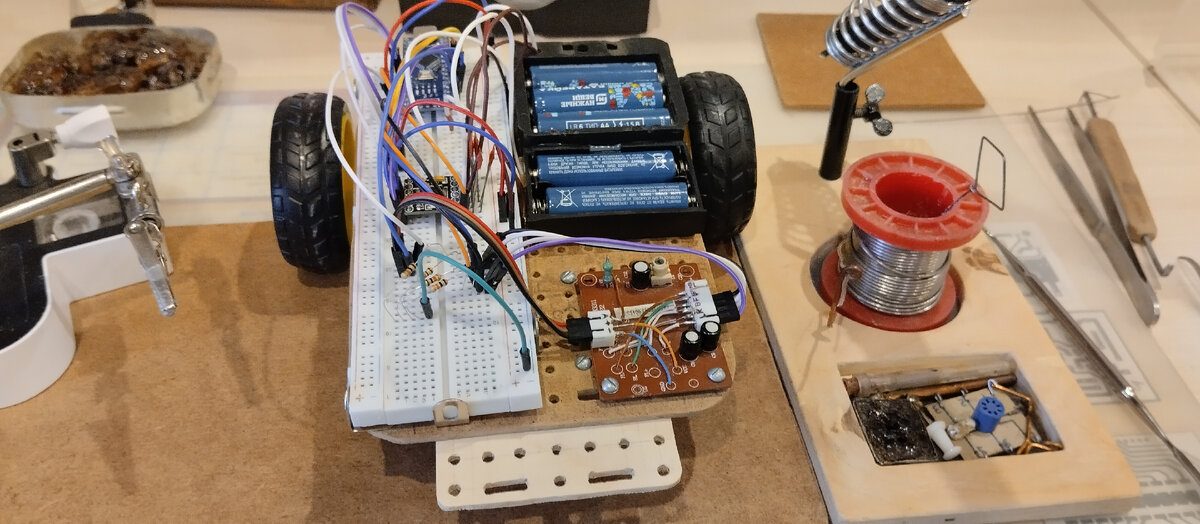
Пока что все его элементы соединены с помощью проводов и BreadBoard'а. Не самый практичный вариант, но на этапе разработки и усовершенствования подходит.
Основа
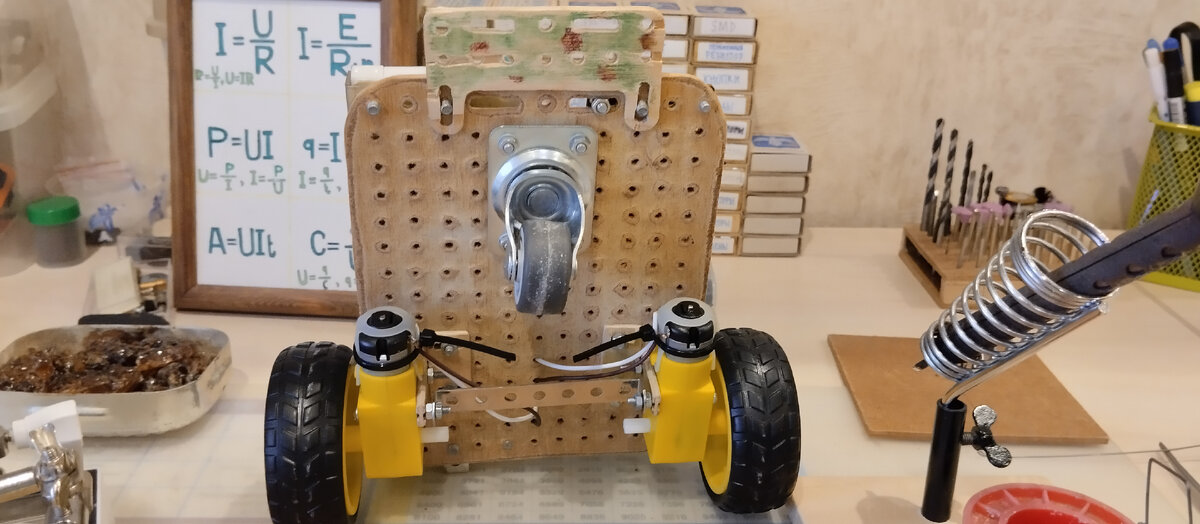
Основу я сделал из ДВП: что под рукой было (а именно ДВП, шуруповёрт и электролобзик), из того и слепил)) Конечно, в идеале основа должна быть из 5-миллиметровой фанеры и вырезана ЧПУ фрезером.
Так как это не готовый робот, а база для сборки, на которую можно ставить различные моторы, датчики и т.д. вся основа содержит огромное количество отверстий, совместимых с старым добрым металлическим конструктором.
Крепление для датчиков
первую версию крепления я так же сделал из ДВП. Но испытания она не выдержала:
И я вырезал новую, уже фанерную:
Два удлинённых отверстия нужны для регулировки расстояния между датчиками.
Контроллер
Мозгом робота является Arduino NANO. Она имеет маленькие размеры и отлично помещается на BreadBoard'е или плате.
Усиление сигналов для моторов
Для этого я использую маленький, но очень мощный драйвер двигателей DRV8833. Для уменьшения выбросов ЭДС самоиндукции с моторов, не будут лишними керамические конденсаторы.
Дистанционное управление
На фото ⬆️ в нижнем левом углу стоит плата радиоприёмника на 27 MHz, когда-то выдернутая из радиоуправляемой машинки. Конечно, удобнее и функциональные использовать Bluetooth модуль, его у меня не имеется (был, но сгорел), так что надо заказывать на АлиЭкспресс.