После Второй мировой войны остро стояла проблема восстановления городов и развития промышленности. Основным способом производства до сих пор оставался ручной труд, что усложняло и затягивало процесс восстановления, поэтому инженеры того времени сосредоточились на решении задач по автоматизации производства.

Благодаря инженерам из США Джорджу Деволу и Джозефу Энгельбергеру в 50-х годах XX века появились первые промышленные роботы.
В 1954 году Девол получил патент на разработку устройства, перемещающего предметы — так он хотел решить проблему транспортировки деталей внутри цеха. Реализовано это было с помощью программы, написанной на перфокартах. В 1956 году Девол и Энгельбергер основали компанию Unimation, которая стала первой в мире компанией, производящей робототехнику. Именно в ее лаборатории был создан первый промышленный манипулятор.
В период с начала 1960-х годов на рынке стали появляться промышленные роботы этой компании под названиями Unimate. Эти роботы были уже довольно продвинутыми: у них была система обратной связи и контролируемая траектория движения, числовое программное управление и память, а также принцип программирования через обучение.
В автомобильной и металлургической отрасли использование промышленных роботов оказалось экономически выгодным, затраты на их приобретение окупались уже менее чем за два года. Это дало толчок для развития производства и привело к первым коммерческим успехам.
С 1967 года манипуляторы начали использовать в Европе, включив в их функционал сварку и покраску изделий. Роботы получили «техническое зрение» благодаря видеокамерам и датчикам, позволяющим определять размеры и расположение изделий.
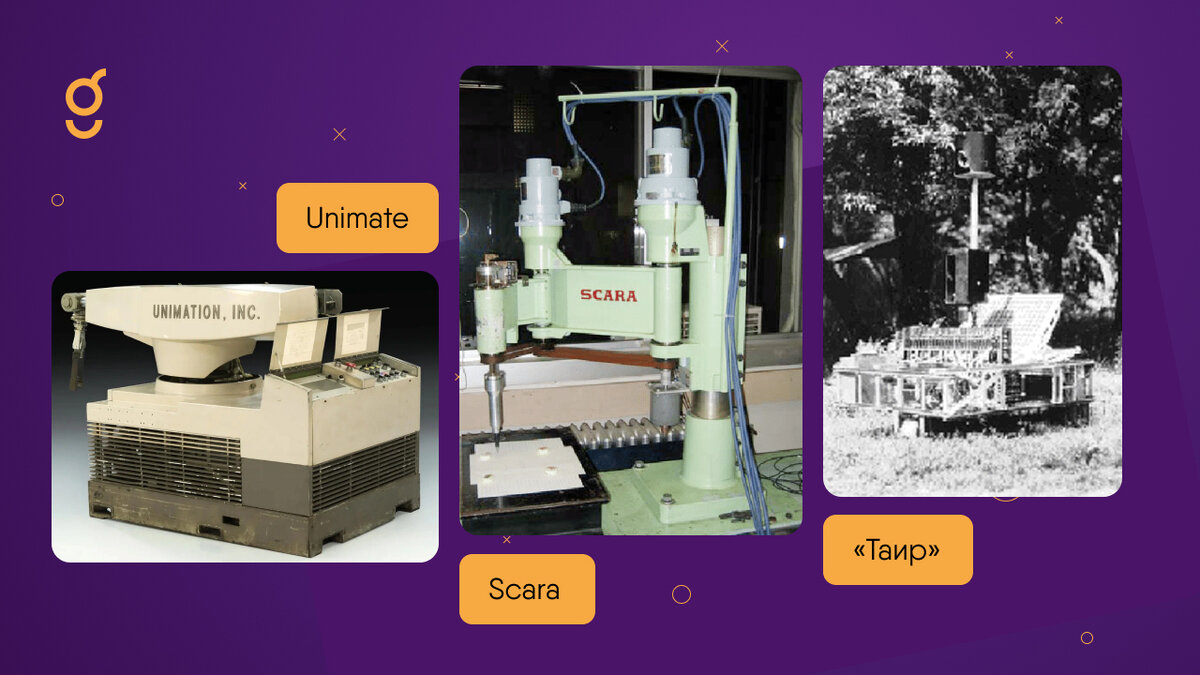
В 1972 году советские ученые разработали экспериментальный образец робота «ТАИР». Этот робот представлял собой самоходную трехколесную тележку, был оснащен системой датчиков и интегральным искусственным интеллектом. Однако прорывным достижением в области робототехники стало использование на «ТАИРе» нейронной сети, которая была реализована на аппаратном уровне. Сеть была оснащена алгоритмами для обработки информации, планирования поведения и управления движением робота.
В 1984 году компания Adept презентовала первый робот с электродвигателем — Scara. Такая конструкция сделала промышленных роботов еще более простыми и надежными, при этом сохранив высокую скорость.
В 90-е годы роботы на производстве перестали приносить ожидаемую прибыль, что вызвало спад и приостановку финансирования крупных проектов. В середине 2000-х годов появился интерес к андроидам и военной робототехнике, который продолжается до сих пор. Об этом мы поговорим в следующей статье, посвященной истории робототехнике.