В этой статье расскажем о двух наиболее часто встречающихся проблем. Решение ошибки C2 и проблемы кручения на месте на роботе-пылесосе iClebo Omega.

Кручение на месте появляется после того, как робот-пылесос касается бампером препятствия. Ошибка C2 связана с неисправностью нижних датчиков, которые находятся под бампером и датчики перепада высоты.
Для устранения данных неисправностей потребуется только снять бампер. Более разбирать гаджет не потребуется.
Кручение на месте
Для того чтобы добраться до передних датчиков, из-за которых это происходит кручение, необходимо снять бампер. Для того чтобы снять бампер, придавливаем его к пылесосу в районе нижней резинки. Как можно видеть на фото 5, бампер закреплен по краям на двух защелках.
С внутренней стороны на бампере видим две пружины (фото 6). Они легко снимаются. Снимаем их (фото 7). По заводской недоработке данные пружины имеют малое сопротивление, которое не всегда позволяет после удара бампера отщелкивать его в исходное положение.
А соответственно, датчики, находящиеся под бампером с правой и левой стороны (фото 8) не размыкается и робот-пылесос начинает крутиться. Затем в какой-то момент (например при встряске) бампер возвращается в исходное положение и размыкает датчик. После этого кручение прекращается.
Для устранения данной неисправности необходимо увеличить мощность пружин. Чтобы это сделать, нужно их немного растянуть. Приблизительно на 1/3. После этого устанавливаем пружины и бампер обратно.
Под бампером на плате можно видеть белый шлейф. При ударе бампера этот шлейф иногда получает повреждения из-за двух ножек детали, припаянной к плате (фото 14). С помощью, например, отвертки загибаем торчащие ножки. После этого подключаем шлейф обратно.
Ошибка C2
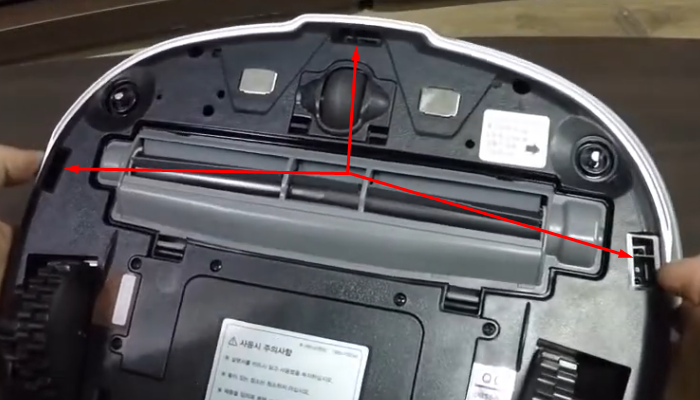
Как мы говорили ранее, за возникновение данной ошибки отвечают три датчика, показанные стрелками на фото 2. Вероятность выхода из строя датчиков крайне мала. Но мы все равно проверим их исправность.
Для проверки работоспособности мы заходим в сервисное меню.
Заходим в меню данных датчиков. Поднимаем робот-пылесос и значение меняется с 0 на 1. Это говорит о том, что все три датчика исправны. Для калибровки датчиков переходим в меню CPSD и выключаем робот-пылесос. Теперь нам известно, что проблема не в датчиках.
Проблема заключается в коннекторах датчиков (фото 18 и 19). Чаще всего виноват центральный коннектор, потому что на него нагрузка больше, чем на боковые. Но мы укрепим все три коннектора, чтобы в будущем с этим не возникло проблем.
Укрепление коннекторов будем производить с помощью клеевого пистолета. Более надежным будет вовсе убрать коннекторы и припаять провода напрямую к плате. Но мы пока придержимся первого варианта. На всех трех коннекторах наносим небольшое количество клея в месте входа штекера (фото 22).
Устанавливаем на место бампер. Можно чувствовать, что бампер стал более упругим.
Включаем робот-пылесос. Укладываем под него белый лист так, чтобы датчики находились над ним. Включаем робот-пылесос и заходим в меню калибровки. Видим значение правого датчика - 19 (фото 27).
Для переключения между датчиками на дистанционном пульте управления роботом-пылесосом используется кнопка "Таймер" (фото 28). При переключении видим значение центрального датчика 18 (фото 29) и значение левого датчика 17 (фото 30).
Далее проверили робот-пылесос и убедились в корректности его работы.
🛴 Компания SpareLine осуществляет многопрофильный ремонт электротранспорта, электротехники и мелкой бытовой техники. Более подробно вы можете ознакомиться с услугами на сайте компании www.spareline.ru.
✅ За консультацией обращайтесь по телефону компании ☎ 8 (495) 205 2728, либо пишите в бизнес-аккаунт ✆ WhatsApp.
✔ Подписывайтесь на наш канал, чтобы не пропустить полезную и интересную информацию!
✅ Аксессуары для роботов-пылесосов вы можете приобрести в нашем интернет-магазине на Яндекс.Маркет, ОЗОН и Wildberries
Остались вопросы? Пишите в комментариях. Если статья оказалась полезной для вас, то подпишитесь на наш канал, поделитесь ссылкой в социальных сетях и нажмите иконку с пальцем вверх!
Читайте наши другие статьи: