Читать предыдущую часть. <<<
В предыдущей статье мы уже рассказали о проекте сверх-компактного летательного аппарата Garrett STAMP, который который по сути представлял из себя кабину вертолета с мощным турбовентиляторным двигателем, встроенным в фюзеляж. Это решение было необычным во многих аспектах - аппарат исключал использование традиционных для авиации крыльев и несущих винтов.
Однако проект STAMP (Малая Тактическая Воздушная Мобильная Платформа), инициированный Корпусом морской пехоты США, не ограничился единственным вариантом. Второе, не менее удивительное летающее средство передвижения называлось WASP, и за его основу были взяты разработки компании Williams Aerial Systems (авиационные системы Уильямса). И если Garrett еще отдаленно напоминал классический транспорт с кабиной для экипажа, то его конкурент и вовсе был "издевательством", по отношению ко всем известным принципам конструирования пилотируемой техники. Его можно описать как идею летательного аппарата, доведенную до абсурда. Хотите летать? Просто возьмите турбореактивный двигатель, установите его вертикально и встаньте сверху!

Но чтобы понять, как разработчики из Williams Aerial пришли к такой "сногсшибательной" идее, давайте окунемся в их историю.
Основанная в 1950-х годах Сэмом Уильямсом, инженером с опытом работы над самолетными двигателями во время Второй мировой войны, Williams Research Corporation выделялась свежим, для своего времени, подходом. Основная специализация компании заключалась в разработке малых турбореактивных/турбовентиляторных двигателей, что в те времена было довольно необычным направлением - обычно авиастроители тех лет не мелочились, и создавали основательные машины с весьма крупногабаритными двигателями. Сэм Уильямс видел потенциал в создании именно компактных двигателей, которые могли бы найти применение в самых разнообразных областях, от гражданской авиации до военных приложений. Вероятно, он был вдохновлен футуристическими идеями о персональных летательных аппаратах, которые могли бы поместиться у любого американца в гараже.
Очень кстати для молодой компании, им выпала возможность посотрудничать с крупной и известной авиастроительной корпорацией Bell Aircraft, которая впоследствии была преобразована в вертолетостроительное предприятие Bell Textron, которое продолжает работать и сейчас. В 1960-е годы, компания Bell, активно исследовала потенциал различных экспериментальных аппаратов, в частности - реактивных ранцев. Поначалу, они экспериментировали с моделью, которая использовала ракетный жидкостный двигатель на перекиси водорода. Однако, этот подход столкнулся с проблемой чрезмерно быстрого расхода топлива, которое иссякало всего за 30_секунд полета.
Корпорация обратилась к Williams Aerial с запросом на разработку более экономичного и эффективного воздушно-реактивного двигателя - и здесь их опыт в разработке миниатюрных силовых агрегатов сыграл свою решающую роль. Компания Уильямса разработала новую модель WR-19 (позднее известный как F107) - исключительно компактный и универсальный двигатель, который затем нашел широкое применение в различных областях.
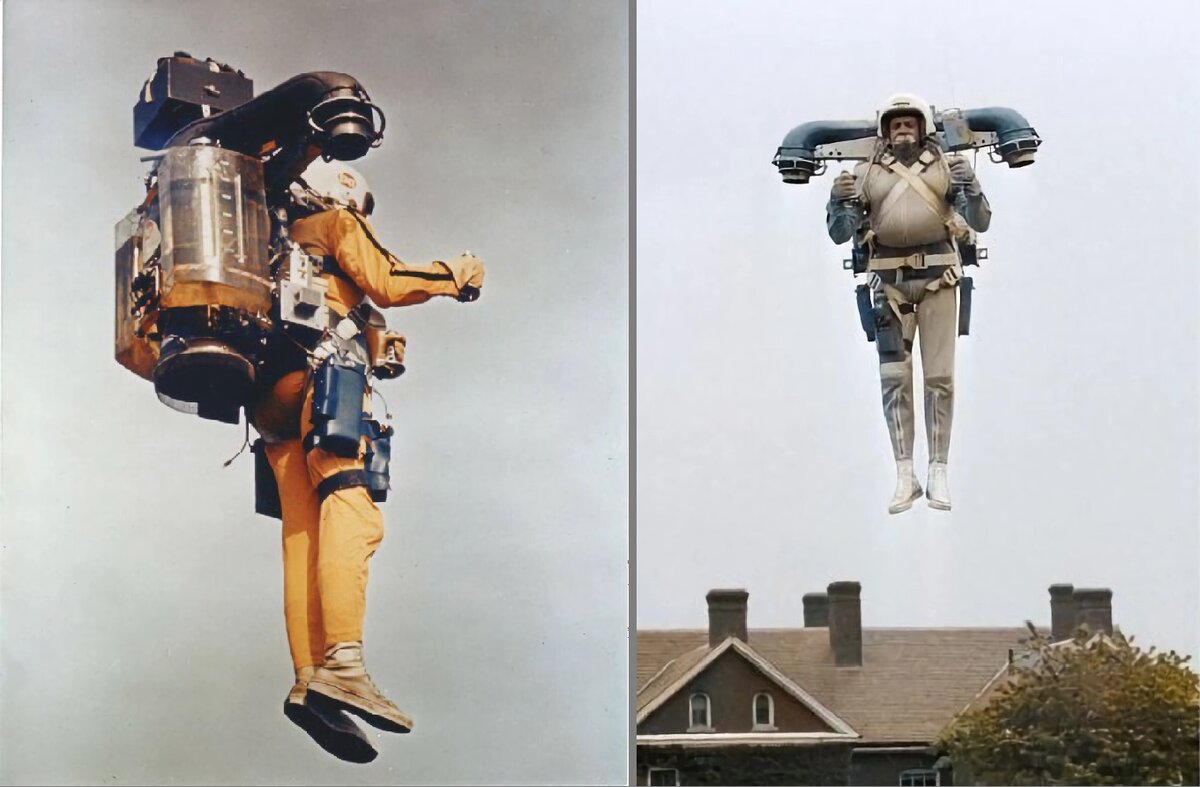
Bell Aircraft, как и планировала, использовала этот двигатель в качестве основы для своего реактивного ранца, и конструкция оказалась весьма подходящей - при собственном весе в 30_кг, устройство легко поднимало пилота в воздух и позволяло увеличить продолжительность полета "джетпака" с жалких 30_секунд до приличных 20_минут. И, хотя реактивные ранцы в целом не получили широкого распространения, современные модели, которые сейчас пытаются внедрить в эксплуатацию, базируются именно на этом принципе.
При этом, двигатель WR-19 получился настолько удачным в своей конструкции и характеристиках, что нашел свое применение и распространение еще во многих экземплярах техники, и был неоднократно модифицирован. В частности, он использовался как в беспилотных летательных аппаратах, так и в крылатых ракетах.
Одним из примеров такого беспилотника, является воздушная мишень Firebee-II. Это специализированный аппарат, который использовался военными для отработки технологий поражения воздушных целей и участвовал во множестве тестов. Firebee запускался с воздушного носителя, способного перевозить до четырёх дронов, но также мог быть запущен и с Земли. Дрон был весьма маневренным и мог быть оснащен разнообразными системами управления, системами оценки попаданий, а его радиосигнальные устройства предназначались для имитации различных боевых самолётов.
Крылатая ракета AGM-86_ALCM, также использовала двигатель WR-19 (модификация F107-WR-101 с тягой 270_кг) - и это является другим ярким примером надежности и хороших характеристик данного агрегата.
Но вернемся к проекту малого пилотируемого авиатранспорта STAMP. Вероятно, когда армия США рассматривала различные концепции малых персональных средств передвижения, в их поле зрения попали технологии реактивных ранцев, наподобие упомянутого ранее джетпака от Bell Aircraft. И если столь небольшой двигатель может быть частью носимой экипировки, почему бы не переоборудовать его во что-то более похожее на транспорт?
Аббревиатура WASP означает Williams Aerial Systems Platform, Платформа воздушной системы Уилльямса.
И когда мы переходим к устройству WASP, нам удивительным образом практически нечего сказать - настолько он прост на первый взгляд.
Турбореактивный двигатель установлен почти вертикально, с небольшим наклоном вперед под углом 12°. К нему крепится каркасная рама, на которой в том числе держится и платформа для пилота - небольшая площадка около полуметра шириной. Роль шасси выполняют небольшие полозья, подобные таковым у многих вертолетов. Каналы воздухозаборника отведены в стороны и забирают воздух по бокам от корпуса, а не прямо перед пилотом. По бокам, под воздухозаборниками, расположены топливные баки. Вся эта конструкция ограждена своеобразным щитом-обтекателем, который являет собой финальный штрих в этом"мозговзрывном" дизайне.
Именно благодаря этому элементу, транспорт получил прозвище "летающая кафедра". Если бы американцы были знакомы со славянским фольклором, они бы нашли более подходящую по внешнему виду и функционалу аналогию...
Что забавно, в предыдущем абзаце мы перечислили практически все составляющие элементы конструкции, не считая конечно нескольких утилитарных приборов, таких как топливные насосы, электроника и органы управления. При этом, судя по всему, WASP обладает всего одной механизированной аэродинамической поверхностью. Речь идет о небольшой пластине прямо под соплом двигателя (на схеме - 40), она управляется пневматикой (на схеме - 42). Ее отклонение приводит к изменению вектора тяги, и, видимо, также служит уменьшению подъемной силы для маневра снижения. Некоторые источники также говорят о возможности регулировки тяги двигателя, для управления высотой полета.
Что касается средств маневрирования, выполненных "в железе" - больше у летающей кафедры нет абсолютно ничего. Зато у нее есть очень подвижный пилот! И грех было бы не воспользоваться его собственной "механизацией". Управление аппарата осуществляется не только подвижностью одной единственной пластины, но и смещением центра тяжести, именно за эту функцию и отвечает человек на борту. Примерно также, как пилот мотоцикла, или человек на гироскутере, помогают своему транспорту наклоняться смещением корпуса, это работает и здесь. Например, наклон корпуса вперед вызывает измение угла по тангажу, и WASP движется прямо по курсу.
Наш паблик VK:
Здесь стоит вернуться немного назад и поднять вопрос: а почему военные в рамках этого проекта не использовали, собственно, экипируемый реактивный ранец? Глядя на всю эту конструкцию, и обсуждая методы управления, создается впечатление, что пилот вынужден балансировать на ней, словно эквилибрист на шаре. Ведь очевидно, что если расположить силовой агрегат сверху, гравитация сама будет выправлять наше положение, как груз, подвешенный на нити. Однако, в компоновке WASP есть своя логика.
Во-первых, любой вращающийся механизм, создает гироскопический эффект. Лопасти турбины и вентилятор двигателя, вращаясь, обладают этой гироскопической стабилизацией и препятствуют силам, направленным на отклонение оси вращения от своего положения. Однако, в случае с такой маленькой турбиной этот эффект достаточно слабый, и не является основным средством сохранения баланса. Но если пилот обладает достаточными навыками и практиковался много часов, ему, по всей видимости, не составит труда найти точку равновесия. А для того, что бы аппарат отклонялся в нужном направлении, достаточно совершать лишь небольшие движения.
С другой стороны, экипированный реактивный ранец на земле - это обуза. Он требует надежной системы фиксации на корпусе пилота, что делает проблемой его быстрое снятие, а полноценно функционировать с ним на плечах - слишком тяжело. В случае же с платформой для стоячего положения, после приземления человеку нужно лишь заглушить двигатель и сделать шаг в сторону - и он моментально окажется в своем привычном положении. К тому же, если речь идет о военном, ему необходимо наличие собственной экипировки на теле, и полетный ранец скрадывал бы значительную часть возможностей для размещения на торсе других предметов.

Что касается испытаний, то в отличии от своего конкурента по программе, Garrett STAMP, данная платформа от компании Уильямса подтвердила свои возможности к полету на деле. Если в прошлой статье речь шла о неотработанной, необкатанной технологии, где об успехе тестовых полетов приходилось верить на слово, здесь все доказательства налицо. Существует не одна видеозапись, где Williams WASP совершает полноценный полет под управлением испытателей. Более того, машина не была сконструирована в виде единственного тестового прототипа, а получила ряд модификаций и даже некое развитие. Самая поздняя версия была переименована в Williams X-Jet, и сегодня ее можно встретить в музеях авиации США.
Программа STAMP началась в 1973 году, но можно обратить внимание, что прикрепленный выше патент на изобретение датируется 1984 годом. Как минимум, это означает, что этой техникой разработчик занимался на протяжении нескольких лет, и видел в ней потенциал для реального внедрения в авиационную индустрию. Разумеется, как и со всем остальным компактным аэротранспортом, этот образец отличался большой прожорливостью в вопросе топлива, и низким запасом хода.
Кстати, современные энтузиасты даже мастерят похожие платформы, эдакие "ховерборды" с маленькими реактивными двигателями. Впрочем, что касается самой компании Williams, они судя по всему не нашли покупателя для данного вида продукции, и переключились на более тривиальные и привычные для себя виды деятельности - конструирование небольших воздушно-реактивных двигателей.
Подводя итоги, стоит упомянуть еще один аспект, который весьма заинтересовал некоторых наших читателей. Речь идет о вопросе безопасности таких методов полета. И действительно, если говорить о стандартной авиатехнике, все решения по спасению экипажа в той или иной ситуации уже отработаны. Например, вертолет с отказавшим двигателем может относительно безопасно приземлиться в режиме авторотации, производя "подрыв винта" у самой земли. Самолеты привычно летают на большой высоте, и у летчиков обычно есть время катапультироваться, либо покинуть поврежденную машину, а в случае отказа двигателя при сохранности планера - посадить самолет, если позволяет ландшафт местности.
Авторотация — это режим работы несущего винта вертолета, при котором он вращается не от двигателя, а от встречного потока воздуха при спуске. Когда вертолёт приближается к земле, для посадки в режиме авторотации, пилот изменяет угол атаки лопастей винта, чтобы замедлить спуск и приземлиться мягко. "Подрыв винта" на сленге летчиков означает резкое изменение угла атаки лопастей винта, чтобы создать достаточную подъёмную силу для замедления спуска.
Но как быть, когда вы находитесь на борту такого аппарата - без крыльев и винтов? В случае с платформой Garrett, еще можно порассуждать о системе катапультирования. Но в случае с WASP, со стоящим пилотом без кресла - это невозможно, или скорее сюрреалистично. Тем не менее, управление такими транспортными средствами обычно предполагало пилотирование на сверхмалых высотах, исчисляемых единичными метрами. Существует версия, что военные видели в таких разработках примерно такую сущность: подобный авиатранспорт был способен передвигаться над любой пересеченной местностью, не обращая внимания на рельеф. Но с другой стороны у него не было необходимости подниматься на большие высоты, где его могли поразить противовоздушные средства. Таким образом, в аварийной ситуации пилоту угрожало падение с высоты 2-3 этажей... Можно ли рассматривать это как технологию сохранения жизни?
Как бы там ни было, подобные программы оставили огромное наследие, и мы с радостью расскажем Вам о еще многих других проектах. До встречи!
Статья о том, что человек уже осваивает атмосферные полеты и на других планетах: