25 октября 2023 года "CNSA" (Китайское управление пилотируемой космической техники) опубликовало результаты предварительных выборов по плану разработки пилотируемого лунного ровера.

Была выбрана исследовательская программа "Колесница Ваншу", возглавляемая пекинским университетом "Цинхуа".
Данный университет разрабатывает пилотируемый луноход с 2017 года. И после многих корректировок плана разработки, команда сначала создала концепт "демонстрационно-проверочный ровер с независимым приводом на четырёх колесах и технологией независимого рулевого управления".
Далее был создан следующий концепт "четырехколесный ровер с регулируемым наклоном кузова и функцией перистальтического вождения".
И, наконец, воплотив в жизнь китайскую цивилизацию и традиции, культура интегрированная в дизайн пилотируемого лунохода, основанного на инженерных технологиях и прорывах в гуманистической мысли, формируя текущий план разработки и был создан пилотируемый лунный ровер "Колесница Ваншу".
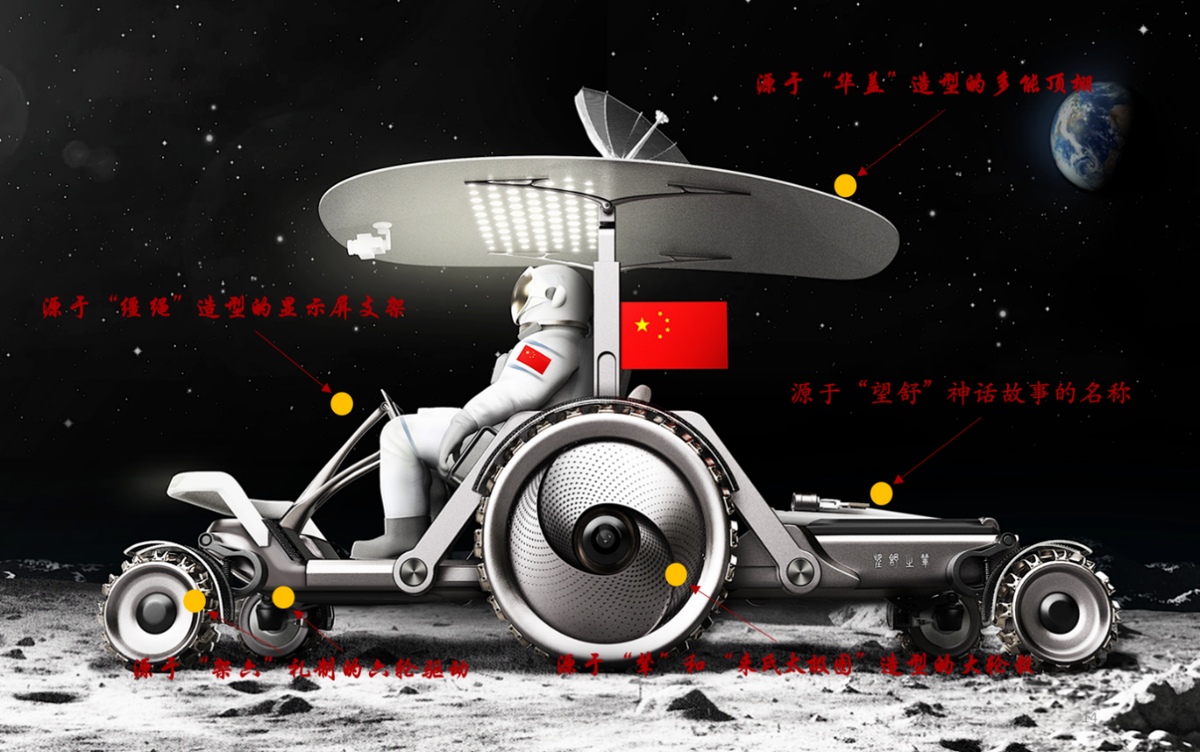
Команда разработчиков назвала пилотируемый луноход в честь "Колесницы Ваншу". В древних китайских легендах Ваншу была богиней, которая ехала за луной, и ее также называли луной. Что касается общей конфигурации лунохода, то вдохновением для дизайна послужили ключевые элементы бронзовой повозки и лошади, найденные с терракотовыми воинами и лошадьми Цинь Шихуана.
Пара центральных крупногабаритных колес используется для подчеркивания ключевых характеристик ”колесницы", круглый куполообразный козырек используется для подчеркивания великолепия и достоинства автомобиля. А форма кронштейна дисплея в виде “поводьев” и независимый привод на шесть колес означает, что человек, который управляет “колесницей Ваншу”, является специалистом по пилотируемым исследованиям Луны. Кроме того, чтобы продемонстрировать широту и глубину китайской культуры и китайской философской мысли, на ступицу большого колеса была также нанесена форма "Карты тайцзицюань Лая”☯.
Что касается конфигурации пилотируемого лунохода, то увеличенная высота сиденья астронавта, не только эффективно снижает мышечную силу, необходимую космонавту для сопротивления деформации надувного герметичного скафандра, но и расширяет его поле зрения.
Навес на крыше ровера, не только обеспечивает конструкцию для укладки солнечных панелей, но и решает проблему долговременного электроснабжения научных приборов и оборудования. Он также защищает астронавтов от сильного солнечного света в течение лунного дня и создает затененную зону для бортового оборудования, тем самым снижая необходимую устойчивость приборов к высокой температуре, около +128°C в течение лунного дня.
Кроме того, для защиты космонавтов предусмотрен "кронштейн защиты от крена", необходимый для открытого ровера. Благодаря продуманной конструкции лунохода, для складывания и раскладывания, соблюдаются строгие ограничения по его размеру и весу, необходимые для его доставки в качестве сложенного "лунного модуля" на поверхность Луны, а в задней части ровера образуется большая платформа для размещения научных приборов, оборудования и приспособлений, а также собранных лунных образцов.
Чтобы реализовать эффективное, безопасное и безотказное управление пилотируемым луноходом, команда разработчиков применила идею управления ориентацией спутника к управлению движением ровера и решила проблему управления движением после того, как несколько колес лунохода вышли из строя. Сформированная теория, метод и технология централизованно-децентрализованного управления транспортными средствами могут быть перенесены на управление наземными электромобилями, предоставляя электромобилям более гибкие возможности рулевого управления и решая проблему устойчивости транспортного средства при поворотах на высокой скорости и движении на высокой скорости по скользким дорогам.
Команда разработчиков также разработала технологию человеко-компьютерного гибридного улучшенного вождения пилотируемого лунохода, реализующую три режима вождения: ручного, автономного вождения и гибридного человеко-компьютерного вождения (с системой помощи водителю), которые не только доставляют астронавтам удовольствие от вождения, но и обеспечивают гарантию безопасного вождения и автономного возвращения на лунный модуль при особых обстоятельствах. Эта технология также может быть внедрена в управление наземными транспортными средствами для достижения лучшего сочетания манипуляций человека и автономного вождения.
Кроме того, чтобы решить проблему ограниченного движения запястий и пальцев людей, одетых в лунные скафандры, и в то же время повысить надежность вождения, специально разработан рычаг управления, который может на ощупь разделять действия вперед, назад, рулевое управление и торможение, а также предоставлены функции джойстика и мыши. Для обеспечения надежности джойстик также расположен посередине между двумя космонавтами, чтобы они могли в любой момент передать функции управления друг другу. Аналогичным образом, эта технология также может быть внедрена на наземные транспортные средства для обеспечения совместного вождения основного и вспомогательного транспортных средств.
В процессе формирования плана развития "Школа аэронавтики и астронавтики" Университета "Цинхуа" отвечает за общий дизайн, "Школа изящных искусств" Университета "Цинхуа" отвечает за художественный дизайн, а другие соответствующие факультеты Университета "Цинхуа" отвечают за реализацию соответствующих ключевых технологий. Совместным подразделением является "Sanjiang Group", дочерняя компания "China Aerospace Science and Industry Group. Sanjiang Group" взяла на себя задачи по проектированию подсистемы привода транспортных средств и инженерной реализации.
Несколько замечаний:
- на данный момент это лишь компьютерные рендеры концепции дизайна лунного ровера, в металле ещё ничего нет;
- концепция "Колесницы Ваншу" представляет из себя открытый, шестиколёсный ровер для перевозки грузов и 2 людей, источником питания которого являются солнечные панели и аккумуляторы;
- шесть колёс- хорошее решение для продолжения работы, даже после выхода из строя двух из них, а в сочетании с методом складывания и раскладывания из "лунного модуля", даёт множество новых способов для перемещения по лунной поверхности и ремонта;
- "лунный модуль", конечно ближайший и лучший транспорт по доставке грузов за пределы Земли, без сомнений- это Старшип, он предоставит небывалые возможности по перемещению грузов на лунную и не только поверхность. Но вот для любой другой ракеты очень важен, не только вес груза, но и его объём, а посему, сворачивание ровера в "лунный модуль" очень хорошая идея. Хотя, на мой взгляд, процесс разворачивания из модуля будет выглядеть немного иначе чем на видео, сначала будет опущена передняя часть, ровер выедет на 4 колёсах из посадочного модуля, а затем уже будет опущена и задняя часть;
- так ли нужен и так ли хорош этот "козырёк"? На данный момент, самыми лакомыми лунными территориями, из-за наличия значительных запасов воды, являются её полюса и в особенности южный, с кратером "Шеклтон" и его окрестностями, куда нацелен и Китай в том числе. А для лунных полюсов подойдёт ну никак не горизонтальная солнечная панель, показанная на рендерах, а горизонтальная. Плюс, антенна, расположенная на "козырьке", будет всегда перекрывать часть света. Логично предположить, что "козырёк", в процессе разработки получит способность перемещаться в вертикальное положение и поворачиваться вслед за Солнцем.
Ровер "Колесница Ваншу" успешно добавлен в статью.
Ещё больше околокосмических и игровых интересностей в ВК: vk.com/mar_tians
Телеграм: t.me/mar_tians
Так же подписывайтесь на ютуб канал, цель 100 подписчиков, для начала публикации новостей и там: youtube.com/mar_tians