Приветствую в этой статье хочу описать мой эксперимент по проверке работоспособности сервоприводов без использования микроконтроллера. Для начала нужно разобраться в устройстве работы сервопривода.
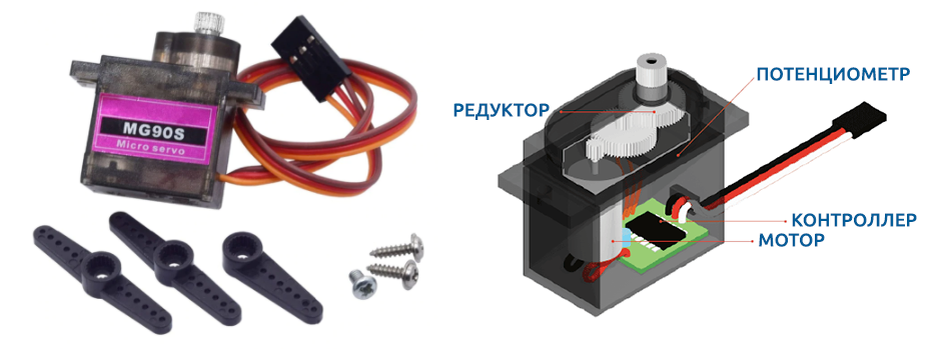
Сервопривод представляет собой электрический мотор, который способен обеспечивать высокую точность позиционирования. Эта точность достигается благодаря использованию обратной связи, которая основывается на данных от датчика или датчиков, встроенных в мотор.
Принцип работы сервопривода заключается в следующем:
1 Управляющий сигнал: На сервопривод подается управляющий сигнал, который указывает желаемую позицию или угол, который должен быть достигнут.
2 Сравнение с желаемой позицией: Встроенная плата управления в сервоприводе сравнивает текущую позицию, определенную с помощью обратной связи от датчика, с желаемой позицией, указанной в управляющем сигнале.
3 Регулирование: На основе разницы между текущей и желаемой позициями контроллер генерирует корректирующий сигнал для двигателя.
4 Двигатель и обратная связь: Двигатель движется в соответствии с корректирующим сигналом, пока текущая позиция не совпадет с желаемой. Обратная связь от датчика постоянно обновляется, что позволяет контроллеру точно регулировать двигатель.
5 Остановка при достижении цели: Двигатель останавливается, когда текущая позиция совпадает с желаемой, и обратная связь датчика сообщает об этом контроллеру

Существуют специализированные приборы для проверки сервоприводов, так называемые СервоТестеры такие устройства как правило могут тестировать до 3х устройств. Нажмите на этот текст чтобы перейди на товар AliExpress.
Однако такого устройства у меня не было. Поэтому я использовал другой метод. И так я изучил способ управления сервоприводов на примере микроконтроллера, для начала я использовал Arduino Nano. Подключил сервопривод к микроконтроллеру и осциллографу. И так управляющим сигналом является ШИМ, с частотой 50000 Гц.
Уменьшение или увеличение частоты приводит к изменению положения вала, также возникают ошибки связанные с уменьшением рабочего угла поворота или с попыткой повернуться в нерабочее положение, при этом сервопривод может выйти из строя, если сразу не заметить что сервопривод уперся в ограничитель и пытается повернуться дальше. При настройке сервопривода рекомендую использовать пониженное напряжение.
Немного хочу рассказать о работе сервоприводов. Во первых, после того как двигатель сервопривода устанавливается в желаемое положение он отключается, но если попытаться изменить это положение силой, то двигатель включается и возвращается в заданное положение. Во вторых, за счет обратной связи после выключения, сервопривод можно руками повернуть на любой угол, однако после включения и подач управляющего сигнала он вернется в заданное положение.
Также замечу что двигатель сервопривода во время движения может потреблять больше 1 ампера. Таким образом для сервопривода нужен мощный и стабильный источник питания, как правило большинство сервоприводов рассчитано на напряжение 5 вольт. Берем лабораторный блок питания, а если такого нет, но есть блоки питания на напряжение больше, собираем схему. Я планирую использовать сервоприводы в устройстве с напряжением около 20 вольт, используя понижающий DC-DC добиваюсь рабочего напряжения в 5 вольт, также дополнительно фильтрую конденсаторами.
Резистор на управляющий вход сервопривода взял около 100 Ом для зашиты выходов управляющей электроники. Подключил к данной схеме питание сервопривода. Без управляющего сигнала сервопривод ведет себя некорректно, так как ловит наводки, в схему можно добавить резистор на 10кОм и подтянуть управляющий провод к минусу схемы.
Зная что управляющая форма сигнала для сервопривода ШИМ, подключил данную схему к генератору сигналов и настроил его на частоту 500000гц управляя скважностью сигнала можно поворачивать сервопривод на необходимый угол.
И так в данном исполнении уже без использования контролёра можно управлять сервоприводом, но мы пойдём дальше.
Да эта всем известная микросхема 555, на основе этой схемы можно собрать генератор прямоугольных импульсов и настроить скважность, как оказалось идея не нова и в интерне существуют уже несколько вариантов управления сервоприводом на данной микросхеме.
Для изменения положения сервопривода в данных схемах используются переменный резистор, или потенциометр.
В заключении скажу, что данные схемотехнические решения были опробованы множеством людей, в моем случае для проверки остановлюсь на генераторе сигналов.