Возможно, когда-нибудь в поисково-спасательных операциях будет задействован целый флот лягушек-ботов.
Новые четвероногие роботы, созданные на основе многолетних исследований и вдохновленные земноводными, могут в один прекрасный день стать полноценными помощниками в поисково-спасательных операциях. Как сообщается в новой статье, опубликованной в журнале Nature Communications, роботизированное трио, разработанное группой специалистов из Университета штата Колорадо, может плавать, ходить и ползать в зависимости от препятствий окружающей среды - во многом благодаря легким искусственным мышцам, не требующим тяжелых бортовых источников питания.
Новые системы, разрабатываемые с 2017 года, были созданы группой под руководством профессора кафедры машиностроения CSU Цзяньгуо Чжао и основаны на материалах, которые меняют жесткость в зависимости от температуры.
"В нашей встроенной схеме морфинга используется легкая искусственная мышца, похожая на человеческую, которая сокращается при подаче электричества", - пояснил Чжао в анонсе проекта от 2 октября. Встраивая эти искусственные мышцы в позвоночник робота или в его кожу, мы можем создавать различные типы фигур". В целом такой подход открывает перспективу создания роботов, способных ориентироваться и работать в сложных условиях".
Помимо электрических свойств, роботы во многом обязаны своими движениями лягушкам - точнее, их многочисленным жизненным стадиям. "Вначале они превращаются в головастиков с хвостами для плавания, затем у них развиваются ноги, которые позволяют им прыгать, ползать и плавать", - продолжает Чжао. "Мы черпаем вдохновение в этих превращениях, но достижение животноподобной встроенной формы морфинга в роботах остается сложной задачей, и мы надеемся, что эта работа будет продолжена".
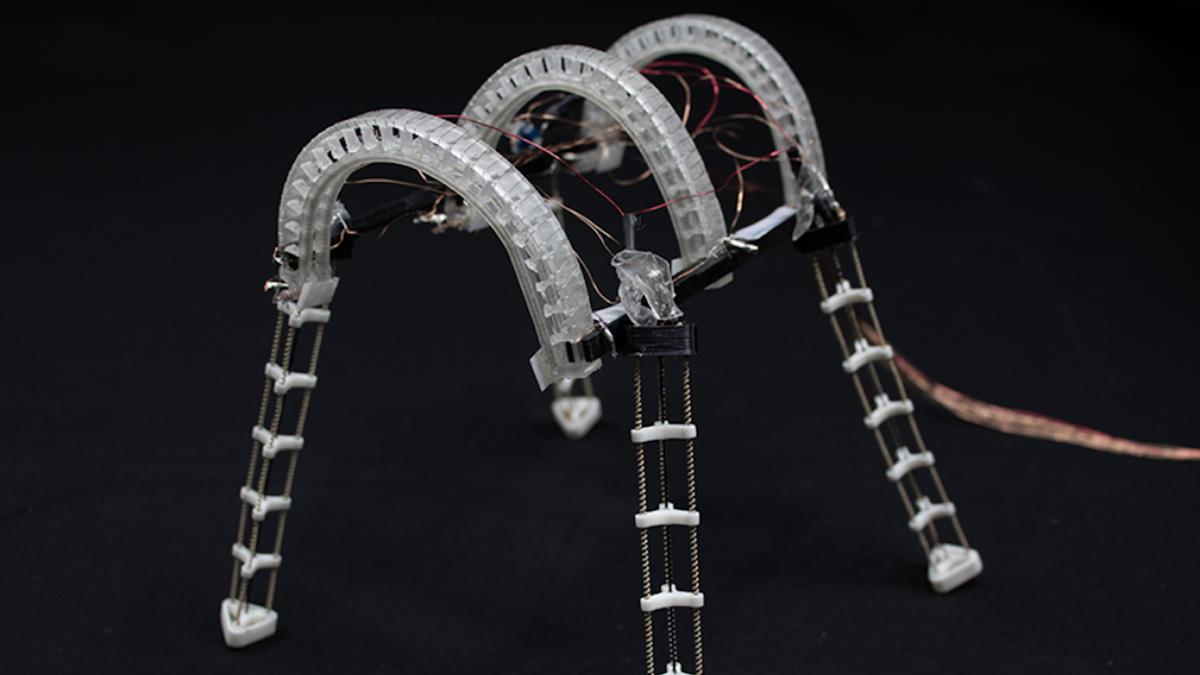
Судя по видеомонтажу, аналогия с лягушкой очевидна. В зависимости от окружающей обстановки и рельефа местности роботы могут изгибать конечности, чтобы "плыть", а затем соответствующим образом переставлять их, чтобы преодолеть скалистое препятствие, имитирующее береговую линию. На суше роботы Чжао могут "прыгать", многократно поворачивая конечности на 360 градусов для продвижения вперед. Третья версия робота может сплющиваться, чтобы проскочить через небольшие проемы, а также держаться за уступ, чтобы перебраться через пропасть.
Пока роботы требуют дистанционного управления, но в будущем их можно будет использовать для навигации анализ окружающей среды с помощью датчиков и камер, а также изменять форму робота в зависимости от окружающей обстановки.
Спасибо за внимание! Подписывайтесь на канал!