Модели с машущими крыльями новых схем
В птицеподобном способе махания крыльями, т. е. в колебании правой и левой половин крыла вокруг осей, параллельных оси корпуса, трудно всегда получать одинаковый угол атаки .вдоль всего размаха крыла, потому что при опускании машущей части крыла угол протекания воздуха возрастает от оси вращения к концу крыла, при подъеме же крыла, наоборот, уменьшается. Сама величина углов и степень их изменения по размаху изменяются от изменения скорости полета и числа взмахов. Получающиеся изменения углов атаки могут быть очень значительными, иногда даже превосходящими критический угол атаки, что сильно изменяет величину и направление аэродинамических сил, делая работу некоторых участков машущего крыла невыгодной (см. приложение, пункты 4, 5, 6).
Приспособления для быстрого сбора ягод шиповника видео
Для того чтобы подъемная сила и тяга были равномерно распределены по всему размаху и не пропадали на концах крыла из-за срывов потока, вызванных чрезмерно большим углом притекания воздуха (углом атаки), очень часто хвостовые части нервюр машущего крыла делают гибкими и упругими. Это приводит к прогибанию нервюр, в результате чего изменяется профиль крыла. Изменение профиля крыла, так же .как и уменьшение угла атаки, предупреждает возникновение срыва потока.
Значительно выгоднее получать .равномерное распределение подъемной силы и лобового сопротивления по размаху за счет одинаковых углов атаки ino ©сему размаху. Этого можно добиться, если отказаться от копирования движения крыла 'птицы, а применить более (простое (решение. Для этого сплошное крыло (не разрезанное на правую и левую половины и не колеблющееся вокруг оси, шарнирно соединяющей обе половины) надо двигать сверху вниз так, чтобы ось .крыла, идущая вдоль размаха, оставалась параллельной самой себе. При этом точность постоянного получения одинаковых нужных нам углов атаки по всему размаху повышается во много раз.
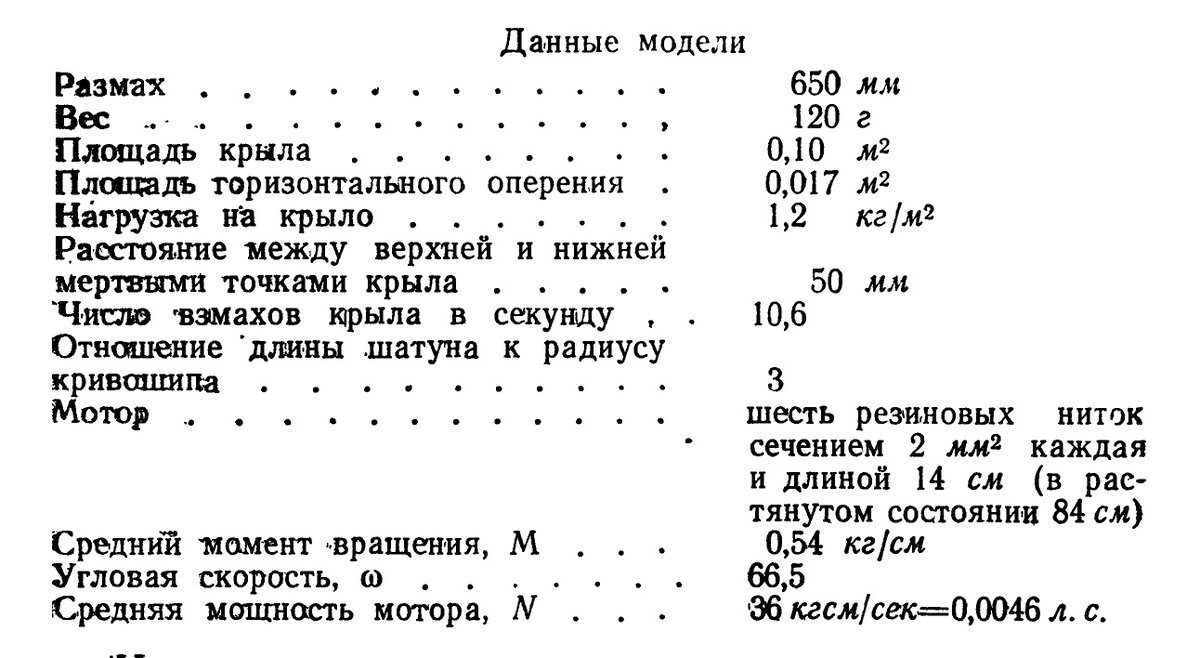
Движение крыла по такой схеме было осуществлено в летающей модели, общий вид которой приведен на рис. 35.
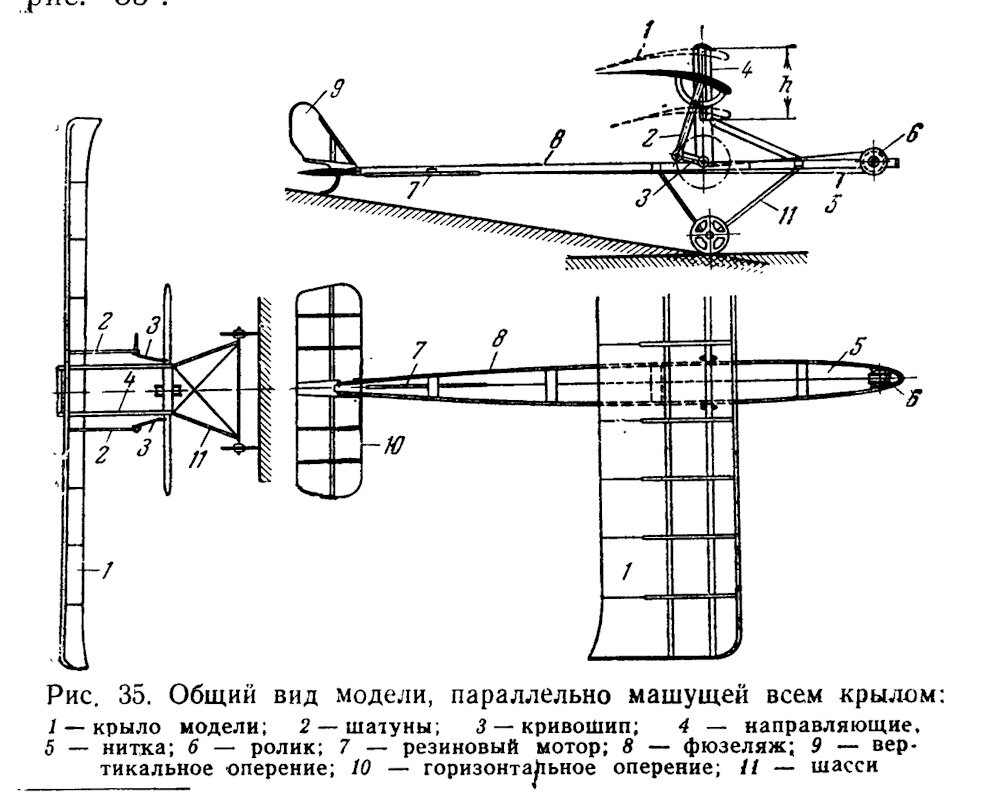
Рис. 35. Общий вид модели, параллельно машущей всем крылом: J — крыло модели; 2— шатуны; 3 — кривошип; 4 — направляющие. 5 — нитка; 6 — ролик; 7 — резиновый мотор; 8 — фюзеляж; 9 — вертикальное оперение; 10 — горизонтальное оперение; 11 — шасси
Крыло 1 этой модели имело жесткую переднюю кромку, два жестких лонжерона и бамбуковые нервюры, хвостовые части которых очень гибки. Задней кромкой «рыла служила ниточка. Лонжероны крыла были жестко связаны с двумя шатунами 2. При вращении валика прикрепленные к нему кривошипы 3 приводили в движение шатуны и начинали двигать .крыло вверх и вниз но специальным направляющим 4 с одновременным изменением его установочного угла атаки. Валик приводился во вращение намотанной на него шелковой ниткой 5, переброшенной через ролик 6, расположенный в носу модели. Нитка сматывалась с валика силой растянутого резинового мотора 7. Все части крепились к фюзеляжу, несущему на себе вертикальное 9 и горизонтальное 10 оперения и шасси 11.
Неравномерность натяжения резины в начале и в конце работы мотора компенсировалась формой валика, приводящего в движение кривошипы. Валик имел малую толщину в том месте, с которого нитка сматывалась в период •сильного натяжения резины, и значительно большую толщину в том месте, с которого нитка сматывалась уже ослабевшим мотором.
Лучшая сушилка для овощей и фруктов Дачник 4 видео
Описанная модель совершала полеты дальностью около 20 м.
Известно, что чем больше будет одна из двух взаимодействующих масс, тем на меньшее расстояние она отодвинется от общего центра тяжести при взаимном отталкивании или притянется при взаимном притяжении, и, наоборот, чем меньше будет одна из масс, тем дальше она отодвинется. Следовательно, для увеличения амплитуды движений врыла необходимо делать его как; можно более легким по сравнению с двигателем (конечно, кроме веса, на амплитуду движений крыла сильное-влияние оказывают также и аэродинамические силы_ развиваемые крылом и корпусом).
Чтобы использовать это явление, ,при испытаниях, производились полеты с добавочным грузом, которые прикрепляли к фюзеляжу. При слишком малом весе фюзеляжа крыло оставалось в воздухе почти неподвижным, а мотор начинал быстро поднимать и опускать-фюзеляж. Некоторое увеличение веса фюзеляжа улучшало работу крыла, так как поднять и опустить тяжелый фюзеляж для мотора оказывалось в этом случае труднее, чем приблизить и оттолкнуть крыло от фюзеляжа. Поэтому при тяжелом фюзеляже крыло совершало взмахи с большей амплитудой и с меньшим числом колебаний в секунду. При превышении какого-то предел а* нагрузки, несмотря на увеличение амплитуды взмахов,, модель начинала слишком сильно терять высоту.
На рис. 36 показаны последовательные положения» крыла модели, летящей вправо.
Автор этой модели заранее подробно рассчитал предполагаемые величины подъемной силы и тяти, создаваемых крылом. Расчеты производились им в следующем? порядке: сначала он складывал скорости поступательного движения модели и скорости подъема или опускание жрыла и получал направление набегающего на крылом потока воздуха в каждый рассматриваемый момент.
Зная установочные углы, он мог определить углы > атаки герыла в каждый момент. Зная углы атаки, он па-поляре крыла находил полную аэродинамическую силу, а по ней суммарную подъемную силу и тягу (см.; стр. 83—85, пункты 4, 5, 6, 7, 8, 9).
Как показали расчеты, наибольшая подъемная сила должна быть в первой половине взмаха крыла вниз. Затем, уменьшаясь, она доходит до отрицательных значений в конце взмаха вверх.
Рис. 36. Движение крыла у летящей модели
Тяга ожидалась только при взмахе крыла вниз. При подъеме же у крыла старались получить уменьшение лобового сопротивления до минимума. Средние значения подъемной силы и тяги оказывались .при этом все же положительными и должны были обеспечить полет модели.
Результаты расчетов автор модели сравнивал с результатами, полученными в кратковременных (5 секунд) •полетах модели, и пришел к выводу, что машущие крылья создают подъемную силу в 3,34 раза большую, чем показывали расчеты.
Разница в весе крыла и корпуса очень умело использована в моделях П. В. Митурича. Вес малой модели его, изготовленной в 1948 году (без мотора), равнялся 22 г. Вес мотора, установленного на модель, со стальной пружиной равнялся 55 г. Следовательно, мотор был тяжелее модели в 3,5 раза.
Если держать модель в руках, то тяжелый мотор, вращаясь вокруг лонжерона крыла, являющегося валом мотора, будет периодически подниматься и опускаться, стремясь при этом рывками опустить или поднять модель. Обычно в таких случаях говорят, что вращающаяся масса неуравновешена и «бьет». Рывки, ощущаемые руками, показывают, что у выпущенной в полет модели в период опускания мотора крылья будут подниматься, а в период подъема — опускаться.
Кроме рывков, направленных вверх и вниз, мотор передает модели рывки, направленные вперед и назад. При удержании модели в руках центр тяжести мотора движется вокруг лонжерона крыла модели в направлении сзади вверх,'вперед, затем вниз и назад (рис. 37).
В полете же получается так, что лонжерон крыла, а вместе с ним и вся модель вращаются вокруг почти неподвижного центра тяжести мотора в том же направлении— сзади вверх, вперед и вниз (рис. 38).
Модель, стоящая на полу, во время подъема мотора опуститься не может (не-позволяет пол). Во время перемещения мотора вперед модель отодвинуться назад также не может не позволяют сцепившиеся с полом иглы, укрепленные на концах ног). Но во время опускания мотора, которое происходит очень быстро, модель легко подпрыгивает от пола. Следующее за этим центр тяжести мотора перемещение мотора назад приводит к свободному перемещению всей модели вперед.
Рис. 37. Вращающийся мотор П. В. Митурича: 1 — рама железная; 2 — подшипники-трубки; 3 — шестерня в 12 зубьев; 4 — шестерня в 60 зубьев; 5 — заводной вал мотора; 6 — пружина ленточная
Очередной подъем мотора ускоряет снижение модели и сцепление игл, укрепленных на ногах шасси с полом. Каждый оборот мотора приводит к своеобразному короткому прыжку модели вверх и вперед. После двух-трех быстрых и почти не уловимых глазом прыжков и некоторого набора скорости за счет отталкивания от пола модель отделялась от него и летела, получая тягу и подъемную силу от быстро колеблющихся эластичных крыльев.
На киноснимках (рис. 39) -отчетливо видны .подъем и опускание центральной части лонжерона по сравнению с горизонтальной линией, нанесенной на всех снимках на одной высоте от пола. Равбег и1 отрыв модели «записывались» на полу маленьким кусочком мела, укрепленным на пружинке рядом с иглой ноги, в виде точек с нарастающими интервалами.
Как собирать ягоду облепиху быстро видео
По киносъемкам полета, сделанным сбоку, можно проследить не только подъем и опускание мотора и модели, но и ее непрерывное перемещение вперед от неподвижно стоящего предмета, изображенного на каждом из кадров вертикальной линией. Снимки производились с частотой в шестьдесят четыре кадра в секунду, т. е. промежутки времени между кадрами равнялись 1/3 секунды.
Рис. 38. Движение модели П. В. Митурича в полете
На рис. 40 приведены три проекции модели. Лонжерон и передняя кромка крыла, фюзеляжная балочка, стойки шасси <а основные нервюры сделаны из тонких бамбуковых лучинок. Добавочные нервюры выполнены из расщепленной соломы. Обтянута модель папиросной бумагой. Задняя кромка крыла нитяная, усиленная на концах вторым слоем бумаги.
Основные расчалки к крылу изготовлены из очень тонкой стальной проволожи, а передние — пружинные.
Мотор состоит из железной рамы 1 с припаянными к ней подшипниками-трубками 2 (рис. 37), сквозь которые пропускается лонжерон крыла с укрепленной на нем ма» лой шестерней в двенадцать зубьев 3. Большая шестерня 4 в шестьдесят зубьев соединяется с помощью трещотки с заводным валом .мотора 5, один конец стальной ленточной пружины 6 крепится к заводному валу, а второй — к .раме.
Рис. 39.. Зарисовки с киноснимков летящей модели П. В. Митурича (перемещения модели вверх, вниз и вперед точно сохранены)
Рис. 40. Общий вид модели П. В. Митурича
Заведенная пружина, стремясь раскрутиться, приводит во вращение 'большую -шестерню. Большая шестерня,. стремясь вращать малую, не может это сделать и начинает катиться вокруг малой шестерни, увлекая за собой? корпус мотора.
Чрезвычайно малый запас оборотов мотора ограничивает .полет этой модели всего несколькими секундами.
Исключительная простота соединения мотора с моделью Митурича и кратковременные, но весьма регулярные взлеты модели показывают, что принцип, предложенный им, может дать хорошие .результаты, но нужно только добиваться еще большего увеличения .амплитуды» колебаний мотора и увеличения продолжительности его» работы.
П. В. Митурич изготовил также оригинальный привод для машущих .крыльев к бензиномоторной модели. Привод позволял производить медленное опускание № быстрый подъем крыльев или же, наоборот, медленный^ подъем и быстрое опускание. Принцип использования»-крыльев с таким приводом описан в разделе «Полезные-советы». Обший вид привода дан на рис. 41.
Моторная группа, шасси, фюзеляж и хвост объединялись в одно целое и представляли собой «тяжелую»,, почти не смещающуюся в полете массу.
Легкое крыло и легкий подвижной стержень с расчалками представляли собой «легкую» смещающуюся массу, вес которой был раз в шесть меньше не смещающейся массы. Амплитуда смещения привода достигала; небывалой величины — 30 см.
На задней части коленчатого вала бензинового мотора был жестко установлен диск-храповичок с одним зубом 1 (рис. 41).
К этому диску мог прижиматься ролик 3, свободно скользящий на хвостовике вала) 12. Ролик имел зуб 2 для сцепления с зубом храповичка.
Соединение ролика с храиовичком осуществлялось в тот момент, когда клин 8, укрепленный на нижнем поднимающемся конце стержня, отжимал и поворачивал рычаг 9.
Рис. 41. Бензиномоторная модель с приводом П. В. Митурича (справа дана принципиальная схема механизма, включающего и выключающего намотку): 1 — зуб хвостовика коленчатого вала; 2 — зуб ролика; 3 — ролик, 4 — трос, опускающий стойку; 5 — стойка, связанная с крыльями; 6 — обхваты стоики, скользящие по трубе; 7 — резиновый шнур» возвращающий стоику вверх; 8 — нижний клин, отклоняющий рычаг-включатель; 9 — рычаг-включатель; 10 — верхний клин, отклоняющий рычаг-выключатель; 11 — рычаг-выключатель; 12 — продолжение вала, на котором вращается и скользит наматывающий ролик
После оцепления ролик, вращаемый мотором, начинал наматывать на себя трос 4 и опускать стойку 5. Во время опускания стойка растягивала резиновый шнур 7, который стремился поднять его вверх. Шнур помещался в трубке, являвшейся опорой для скользящих обхватов •6 стойки. Опускание стойки происходило до тех пор, пока верхний клин 10 не отжимал рычаг-выключатель 11. Рычаг, поворачиваясь, сбрасывал ролик с храповичка и •освобождал резину, стремительно поднимавшую стержень вверх.
В момент подхода нижнего клина 8 к нижнему рычагу ролик, смещенный рычагом, опять входил в сцепление с храповичком мотора и опять начиналось опускание стержня, повторяющее цикл.
Для запуска мотора на валу укрепляли маховик-мулинетку. Привод устанавливался на очень высоком шасси, обеспечивавшем большой ход крыльям. Крылья делали нескольких вариантов. Было крыло сплошное, горизонтально расположенное и двигающееся параллельно самому себе. Были также крылья, состоявшие из правой и левой половин, двигавшихся подобно птичьим. На рис. 41 дан чертеж (привода с .птицеподобными крыльями.
Низкие эксплуатационные качества бензинового мотора «К-16» и значительные переделки, произведенные в моторе Митуричем, привели к тому, что устойчивой работы от привода получить не удалось. Несмотря на шюхую работу моторной группы, модель весила на 80% меньше.
Он пытался использовать в (авиации оригинальный волновой способ получения тяги. Такой способ ему удалось с большим успехом применить для движения модели рыбы в воде (рис. 42).
Облепиховое масло как сделать в домашних условиях видео
Внутри модели рыбы находился механизм, вращающий проволочную спираль. Спираль, идущая от головы до хвоста, помещалась в вертикальных щелях секции-корпуса модели рыбы (см. рис. 42, IV). При вращении пружинного мотора, заключенного в голове модели рыбы, каждый участок спирали описывал круговую траекторию. Движение проволоки вверх и вниз приводило к перемещению ее вдоль вертикальной щели в корггусе модели рыбы и секции корпуса не смещались. Движение же проволоки вправо и влево приводило к смещению данной секции вправо или влево вслед за проволокой. Спираль изгибала тело модели рыбы так, что на нем была видна выпуклость и впадина. При вращении спирали выпуклость и впадина перемещались по телу, напоминая своим движением движение волны.
Рис. 42. Устройство движителя в искусственной рыбе П. В. Митурича
Направление вращения мотора и направление за-кручиваиия спиральной проволаки берется таким, чтобы волны бежали от головы модели рыбы к ее хвосту. Довольно 'Точно копируя движение тела живой рыбы, волна, бегущая по телу модели рыбы назад, отталкивала модель рыбы вперед. Корпус модели рыбы помещался в гибкий непромокаемый мешок. Несмотря на малый запас оборотов, модель рыбы всегда отчетливо набирала скорость и проплывала несколько метров.
Для движения в воздухе П. В. Митурич применил этот же принцип на летательном аппарате, названном им «волновиком». Поперек шелковой обтяжки волно-вика (рис. 43) были пришиты парами тонкие гладкие бамбуковые щепочки. Между щепочками помещалась спираль из стальной проволоки.
Рис. 43. Летающий "волновик" П. В. Мвтурича
Рис. 44. Модель, разработанная А. И. Болдыревым:
1 — предкрылок; 2 — кронштейн крепления оси предкрылка; 3 — профиль участка крыла, не имеющего предкрылка; 4 — маховик; 5 — выступ для вращения маховика при запуске мотора; 6 — кривошип, приводящий в движение предкрылок
Каждый участок проволочной опирали, описывая круговую траекторию, имел возможность свободно перемещаться в щели между щепочкам и вправо и влево. При движении же проволоки вниз и вверх она увлекала за собой легкую обтяжку крыла. Горизонтальные волны, бегущие спереди назад по поверхности волновика Митурича, напоминали волны, бегущие по поверхности тела камбалы или ската. Проволочная спираль приводилась в движение через шестерни резиновым мотором. При длине модели 50 см радиус спирали, был равен примерно 3 см.
Модель делала небольшие пробежки по земле без отрыва в воздух и несколько увеличивала дальность 'планирующего полета при пускании с рук.
Модель, (предложенная А. И. Болдыревым, не является моделью с полностью машущим крылом или моделью с маленькими крылышками. Ее сравнительно небольшие колеблющиеся предкрылки рассчитаны для постоянной совместной работы с большим неподвижным крылом.
А. И. Болдырев конструктивно разработал данную» схему и провел экспериментальные и теоретические исследования ее, а его последователи Б. С. Блинов и П. А. Солодов построили несколько моделей с резиновым1 и бензиновым моторами. На этих моделях была достигнута продолжительность полета, превышающая 3 минуты (ограничения накладывались моторной установкой).
В 1959 году П. А. Солодов участвовал в авиамодельных соревнованиях с бензиномоторной моделью с колеблющимся предкрылком. Предкрылок этой модели, (рис 44) совершает колебания вокруг оси, проходящей, вдоль его передней кромки. При большом числе колебаний (у модели с резиновым моторам 1000—1500 колебаний в минуту, а с бензиновым мотором — 3000—4500 колебаний в минуту), подобно рыбьему хвосту — ластам или вееру, предкрылок отбрасывает воздух со значительной скоростью назад, а сам отталкивается от воздуха вперед, т. е. создает тягу. Машущий предкрылок заменяет винт самолета.
Предкрылок занимает почти весь размах и располагается так, что поток отбрасываемого им воздуха обтекает верхнюю поверхность крыла. Повышение скорости воздуха под крылом увеличивает его подъемную силу и, сдувая пограничный слой, задерживает срыв потока до очень больших углов атаки. Подъемная сила у такого крыла возникает при работе предкрылка уже тогда, когда крыло еще даже не начало двигаться вперед.
Рис. 45. Механизм привода машущих крылышек на модели Г. С. Васильева:
1 — передние кромки тянущих крылышек; 2 — подшипники средние; 3 — двухколенный ведущий валик; 4 — подшипники концевые; 5 — двухколенные ведомые валики; S — усиливающие наклейки
Резиномоторная модель Г. С. Васильева изготовлялась для проверки наиболее уравновешенного способа параллельного махания крыльями, когда пара крыльев, периодически меняя направление, движется! навстречу друг другу.
К обычной схематической резиномоторной модели, имеющей неподвижное несущее крыло, хвостовое оперение и фюзеляжную рейку, вместо винта крепились небольшие крылышки.
Для осуществления параллельного движения жесткие передние кромки 1 двух узких длинных «тянущих» крылышек (рис. 45) были прикреплены к подшипникам 2, насаженным на средний двухколенный ведущий валик 3,. вращаемый резиновым мотором. Концы крылышек также крепились к подшипникам 4, сидящим на кониевых свободно вращающихся двухколенных ведомых валиках 5. Задняя кромка обтяжки из папиросной бумаги соединялась с валиками с помощью ленточек из более плотной бумаги 6. При движении крылышек сверху вниз и снизу вверх оттяжка у задней кромки должна слегка провисать.
Все три двухколенные валика имели одинаковые размеры. При вращении среднего валика жесткие передние кромки крылышек приводили во вращение два других валика.
При вращении валиков крылышки совершали .параллельные движения то кругу, делая, таким образом, кроме нужного нам движения сверху вниз и снизу вверх, еще ненужные движения вправо и влево. Чрезвычайно простая конструкция привода обеспечивала равномерное движение крылышек без всяких рывков.
Хотя модель и не была доведена до летного состояния, но крылышки этого типа отбрасывали назад ровный и довольно сильный поток воздуха, свидетельствовавший о созданной ими тяге.
Как настроить металлоискатель на пограничную глубину поиска видео
Все страницы летательных аппаратов с машущими крыльями
- Простейшие приспособления для изучения работы машущих крыльев
- Как сделать самомашущий планер
- Модели, имеющие небольшие машущие крылышки и большое неподвижно установленное крыло
- Полезные советы по конструированию летающих машущих моделей
- Модели, у которых величина машущих крылышек приближается к величине неподвижных крыльев
- Модели с полностью машущим крылом
- Модели с машущими крыльями новых схем