Исследователи из Швейцарской высшей технической школы Цюриха представили новое достижение в робототехнике со своей биомиметической сухожильной фузионной рукой, 3D-печатной конструкцией, которая может похвастаться впечатляющими степенями свободы (DoF) и сложными возможностями вращения в руках. Отойдя от традиционных методов управления, основанных на моделях, команда использовала политику обучения с подкреплением (RL) для навигации по сложностям современных роботизированных конструкций, особенно подходящих для умелых задач с участием антропоморфных рук.
В сотрудничестве с Центром обучающих систем Max Planck ETH Faive Hand готовит почву для работы в различных секторах, от складской логистики до помощи на дому. Исследователи подчеркнули, что дизайн, ориентированный на человека, обеспечивает более интуитивное взаимодействие с инструментами и средами, преодолевая разрыв между людьми и машинами.
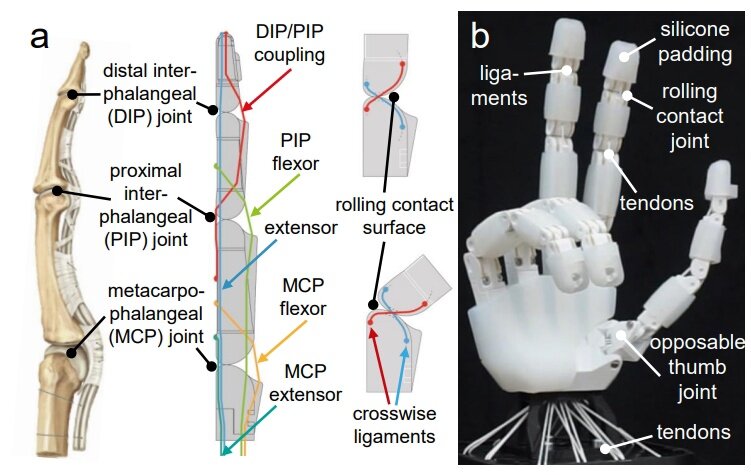
Рука, разработанная в Soft Robotics Lab, сочетает в себе биомиметические принципы и механику, управляемую сухожилиями, обеспечивая утонченность манипуляций. Его напечатанная на 3D-принтере композиция, приводимая в движение серводвигателями, обеспечивает масштабируемость для массового производства. Вы можете увидеть его в действии в клипе ниже.
Отличительной чертой этой инновации являются шарниры с контактами качения, обеспечивающие вращение без фиксированной оси — конструктивная особенность, которой сложно управлять в роботизированных руках с высокой степенью безрассудной активности. Несмотря на то, что традиционные вращательные энкодеры трудно интегрировать, в настоящее время разрабатываются шарнирные угловые энкодеры для повышения точности управления. Несмотря на это ограничение, фреймворк моделирования руки и низкоуровневый контроллер облегчают выполнение политик с помощью обучения RL, что продемонстрировано в демонстрациях передачи навыков в симуляторе IsaacGym.
Заглядывая в будущее, у исследователей есть амбициозные планы по расширению возможностей Faive Hand. На горизонте реальные задачи и клонирование поведения, а также включение функций приведения в действие и датчиков. Обладая потенциалом для продвинутой ловкости, биомиметическая сухожильная рука действительно может изменить ландшафт роботизированных манипуляций, открывая новые сферы возможностей в человеко-машинном взаимодействии.
И выглядит это тоже довольно круто!
Оригинал статьи : https://3dprinting.com/news/eth-zurich-3d-prints-tendon-driven-robotic-hand/