Как сделать машины, которые ходят
Люди давно уже стали сознавать, что ноги — уникальное средство передвижения. Конечно, им не под силу конкурировать с колесом на гладкой дороге, но зато они прекрасно могут обходиться без дорог вообще. Ноги позволяют животным и человеку передвигаться по пескам пустыни и по болотным кочкам, среди нагромождения скал и по снегу. И, наверное, не случайно, еще в 1813 г. англичанин Брайтон, прекрасно знавший возможности колеса, приделал к своему паровозу «ноги». Шипя и поскрипывая, невиданная машина медленно, подобно неторопливому пешеходу, зашагала по дороге, отталкиваясь от нее двумя железными рычагами.
Почему часто перегорает лампочка видео
Развитие паровозостроения, как вы знаете, пошло другим путем. Машину Брайтона историки техники отнесли к курьезам, а самого изобретателя зачислили в неудачники. Но полтора столетия спустя отношение ученых к Брантону «смягчилось», и сегодня уже многие конструкторы разных стран мира склоним рассматривать его творение как прообраз шагающих вездеходов для Земли и космоса.
Вес чаще в попытке разрешить «вездеходную проблему» конструкторы исследуют механизмы «шагания» живой природы. За миллионы лет эволюции природа создала множество оригинальных типов движения, приспосабливая живые сушества к различным видам перемещения по земле — ползанию, fiery, прыжкам, ходьбе. Многие животные по скорости не уступают современному колесному транспорту, а их «проходимость» вообще пне конкуренции. Гепард даже на пересеченной местности развивает скорость до 110 км/ч. Леопард, пантера легко преодолевают двухметровые барьеры, а горные козлы пропасти, ширина которых во много раз превышает длину тела этих живот-пых. Росомаха легко бегает по глубокому рыхлому снегу, копыта оленей приспособлены для ходьбы по болотам, а верблюдов — по пескам пустыни...
Пытаясь создать универсальные механические «ноги», ученые изучают структуру органов движении, характер приложения мышечных усилий, которые вызывают те или иные движения в суставах, кинематику сочленений, распределение массы тела по его звеньям, закономерности движения этих звеньев и тела в целом. Исследуют также характер, направление и величину действующих сил и многое-многое другое.
Если раньше создание шагающих машин во многом тормозилось сложностью электронных управляющих систем, то последние достижения в области кибернетики дают основание считать, что в самом ближайшем будущем шагающие машины наконец-то выйдут из стадии опытов.
Вам, наверное, интересно будет узнать, что в университете штата Огайо (США) создан опытный образец шагающего вездехода ASV. Его испытания и отладка начались в 1985 г. Грузоподъемность вездехода, имеющего длину около 5 м и движущегося на шести «ногах-опорах», составляет около 200 кг. Двигатель мощностью 90 л. с. позволяет в условиях полного бездорожья развивать скорость 5... 10 км/час. Система управления включает 15 микрокомпьютеров и оптический локатор (лазерную сканирующую систему). Пять компьютеров анализируют сиг-палы локаторов, а остальные координирую! движение «ног» по командам оператора-водителя, определяющего общее направление движения. Машина способна «ходить» по болотам, горам, пустыням, глубокому снежному покрову и льду. Она может преодолевать препятствия высотой до 1,2 м, перебираться через канавы и водные преграды шириной почти 3 м, при этом корпус вездехода' не отклоняется от горизонтального положения. Трудно сказать, начнется ли в ближайшем будущем промышленное производство таких машин, поскольку стоимость их пока непомерно высока. Поэтому американцы в шутку прозвали вездеходы ASV «кавалерией XXI века».
Кто знает, может быть, именно за шагающими машинами будущее в освоении неисследованных земель и планет нашей Солнечной системы. Представьте себе картину: безбрежное море красноватого песка, источенные ветровой эрозиен скалы причудливых очертаний, фиолетовое небо с маленьким пятнышком не греющего Солнца. Конечно, это Марс. Но что это? Среди песков и каменистых россыпей что-то вдруг сдвинулось с места, причудливой формы аппарат приподнялся на мощных телескопических опорах, словно обозревая местность, и опять опустился на грунт, немного впереди того места где только что находился. Неужели марсиане? Нет, это земной вездеход причем не гусеничный или колёсный и даже не широка машина, которая передвигается посредством двух опорных поверхностей и опирается на грунт всем корпусом в то время, как они подняты. Оригинально, не правда ли?!
Модель этого типа — шагоход, изображенный на рисунке 17 — самая простая из машин такого рода. По подобной схеме иногда строят шагающие экскаваторы, только вместо ног у них предпочитают ставить мощные лыжи.
Основа конструкции — два одинаковых, синхронно вращающихся коленчатых вала, к кривошипам которых крепятся ноги. Кривошипы дают им круговое поступательное движение, и машина шагает вперед или назад, в зависимости от направления вращения. Вездеход может поворачиваться на месте на любой угол в тот момент, когда ноги находятся в верхнем положении. Для этого опоры корпуса крепятся к поворотной платформе. Шагоходу в начале перемещения корпуса приходится поднимать на кривошипах весь свой вес, поэтому модель этого типа не следует перегружать батареями: гораздо удобнее снабдить ее дистанционным управлением по проводам. Редуктор, вращающий кривошипы, должен иметь большое передаточное отношение, иначе двигатель не справится со своей задачей.
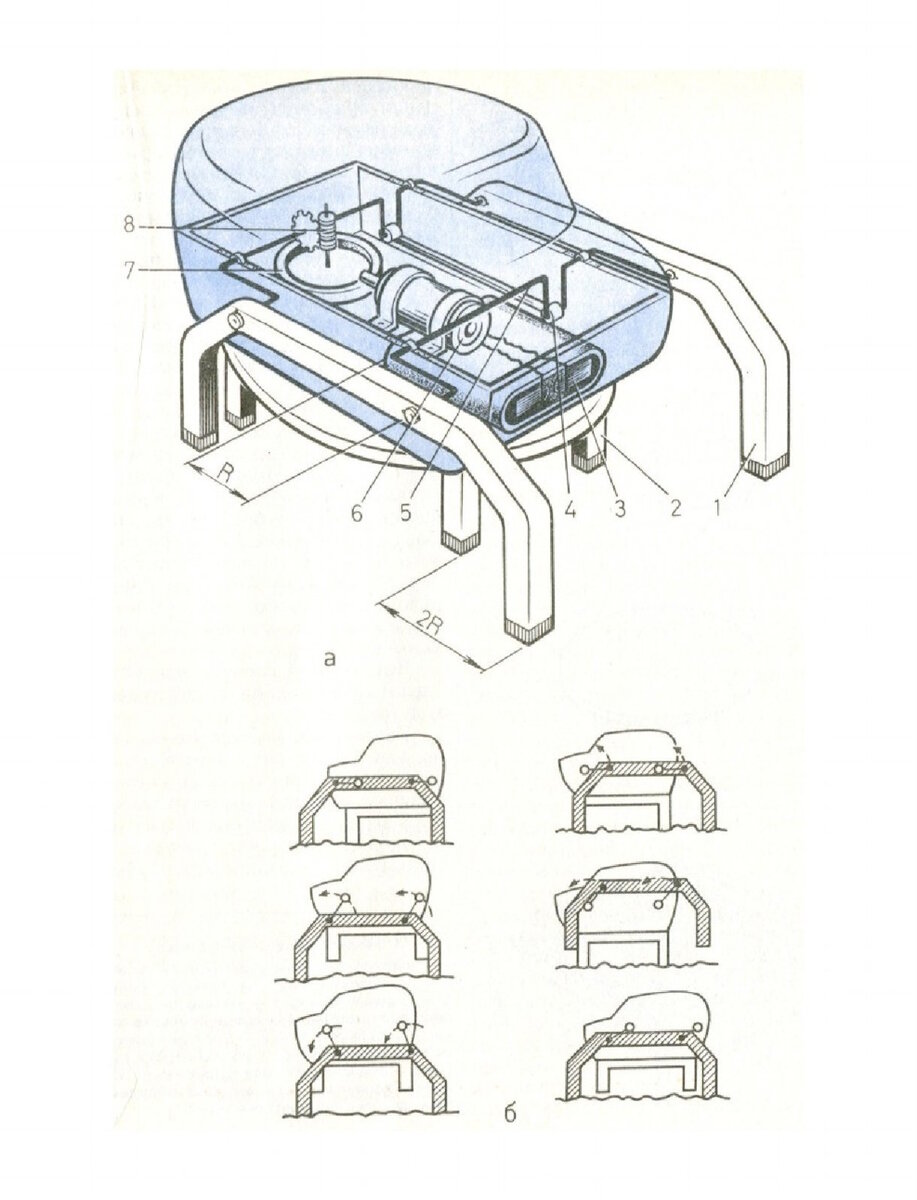
Рис. 17. Простейшая шагающая машина: а — устройство 1 — арка для шагания; 2 — опорная платформа; 3 — батарея питания; 4 — шатун; 5 — кривошип: 6 — мотор; 7 —фрикционная передача; 8 — редуктор; б — схема движения.
На схеме показан дополнительный шатун 4. Он нужен для того, чтобы ведомый вал повторял направлепня вращения ведущего np^i про. ходе через мертвые точки. Иначе его кривошипы станут совершать лишь колебательные движения, и машина вместо того, чтобы перемещаться, будет лишь взбрыкивать, опираясь на передние ноги. Можно, конечно, вместо дополнительного шатуна применить и другие способы синхронизации кривошипов, например зубчатые колеса. Но есть и более простой способ обойтись без шатуна — немного рассогласовать движения ног.
Установка водяного полотенцесушителя своими руками видео
Достаточно развернуть на 20...30° левые кривошипы относительно правых, и одна из ног будет вести вал, когда другая проходит мертвую точку. Правда, машина при «ходьбе» начнет слегка переваливаться с боку на бок, и в некоторых фазах движения ее ноги будут скользить по земле, но зато конструкция упростится. Ноги и опоры корпуса нужно расположить так, чтобы они ступали рядом. Это повысит проходимость.
Вот по этой схеме и попробуйте сделать простейший вездеход-шагоход (рис. 18).
Корпус модели склейте из фанеры или полистирола, в качестве кабины космонавта 5 используйте половинку прозрачною полистиролового елочного шарика или упаковку от зубного порошка. Ноги-опоры спаяйте из металлических трубок и закрепите на осях // из стильной проволоки или металлических спиц для вязания 01,5...2 мм. На концах осей выполните коленообразный изгиб, который позволит им при вращении переносить ходовые опоры вперед и назад, соответственно перемещая в ту или иную сторону корпус вездехода.
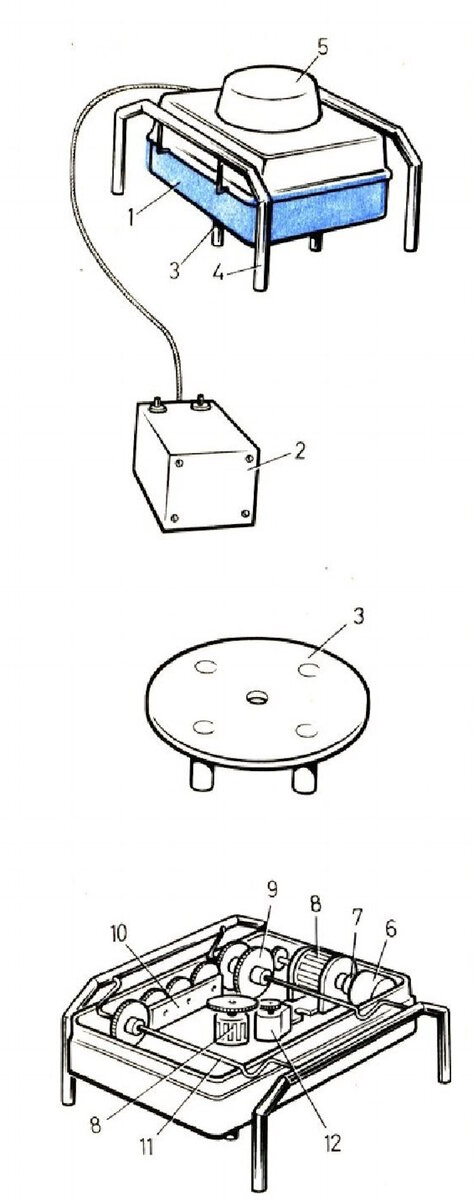
Рис. 18. Модель вездехода-шагохода:
1 — корпус; 2 — блок управления и питания; 3 — поворотный круг на четырех опорах; 4 — ходовая опора; 5 — кабина; 6 — микроэлектродвигатель; 7 — соединительная втулка; 8 — редуктор Р-1; 9 — шестерни привода осей-кривошипов; 10— шестеренчатая передача, соединяющая оси-кривошипы; 1! — оси-кривошипы; 12 — микроэлектродвигатель привода поворотного круга.
На осях установите приводные шестеренки 9. Передачу соберите из пяти шестеренок таким образом, чтобы скорость вращения осей была одинаковой. Одна из осей вращается редуктором Р-1, соединенным С микродвигателем 6 посредством муфты 7,
Двигатель к донышку корпуса прикрепите при помощи хомутика ИЗ жести на болтиках или шурупах. К донышку из полистирола его лучше всего приклеить полистирольным клеем. I
Благодаря своеобразному приводу эта модель может разворачиваться на месте. Для этого у нее под днищем смонтирован поворотный круг 3 с четырьмя стойками-опорами, спаянными из трубок. Этот круг может вращаться от микродвигателя 12 и редуктора Р-1, соединенных между собой посредством шестеренчатой передачи.
Чтобы машина начала движение вперед или назад, достаточно включить двигатель ходовых опор. Поворот осуществляется при фиксации ходи пых опор в верхней точке и включении двигателя 12. Управление моделью осуществляется с помощью двух тумблеров на блоке питания и управления 2. Рекомендуем окрасить модель шагохода яркой масляной или нитрокраской и нанести номерные знаки и эмблемы. В завершение работы над моделью покройте ее лаком.
Установка анкерного болта видео
Теги : сделать модель планера, сделать модель корабля. сделать модель яхты, сделать поделки с детьми, как сделать своими руками, поделки своими руками, сделать беспилотник, сделать беспилотный корабль,