NASA и Немецкий аэрокосмический центр (НАЦ) успешно провели эксперимент по дистанционному управлению роботами с Международной космической станции в рамках проекта Surface Avatar. Боты действовали в полуавтономном режиме, а астронавт корректировал их действия лишь по мере крайней необходимости.

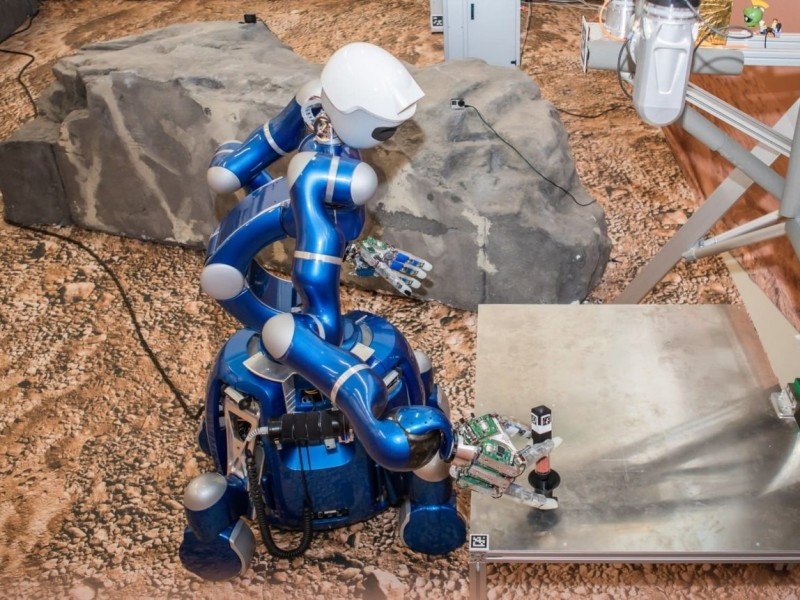
Команда из трёх роботов тестировалась в условиях искусственного марсианского ландшафта — машины выполняли подготовительные работы перед прибытием на Марс людей. Так, гуманоидный Rollin’ Justin разгрузил посадочный модуль, установил сейсмический датчик и прибор Interact Rover для наблюдения за местностью. Вместе с тем он активировал робота LAMA, предназначенного для научных исследований. Rollin’ Justin управлялся через аватар оператором — на экран астронавта поступала информация, которую видел робот, а интерактивный джойстик с обратной связью позволял управлять им и «чувствовать» предметы в его руках. Все задачи эксперимента команда выполнила за пару часов.
Проект Surface Avatar включает в себя минимум три эксперимента с интервалом примерно в полгода. Каждый следующий будет становиться всё более комплексным и сложным. Всё это приведёт к созданию интеллектуальных роботов, работающих в паре с астронавтами на других планетах.