(Результаты: роботы. «ХиЖ» 2023 №6)
Для надежного захвата предмета роботизированной руке требуется минимум три пальца. Однако надежный захват — это далеко не единственная цель. Важно также умение определять форму предмета. Для этого точные сенсоры, разбросанные по всей руке, должны быть прижаты к нему. Датчики невысокого разрешения современных роборук обычно расположены на кончиках их пальцев, поэтому требуется несколько хватов, чтобы идентифицировать объект.
Пальцы современных роборук имитируют природу. Твердую основу пальца, подобную скелетным костям, покрывают мягкими полимерными слоями. Жесткость основы нужна для поднятия тяжелых предметов, например электроинструментов. Мягкая кожа дает возможность брать легкие и хрупкие предметы, не портя их.
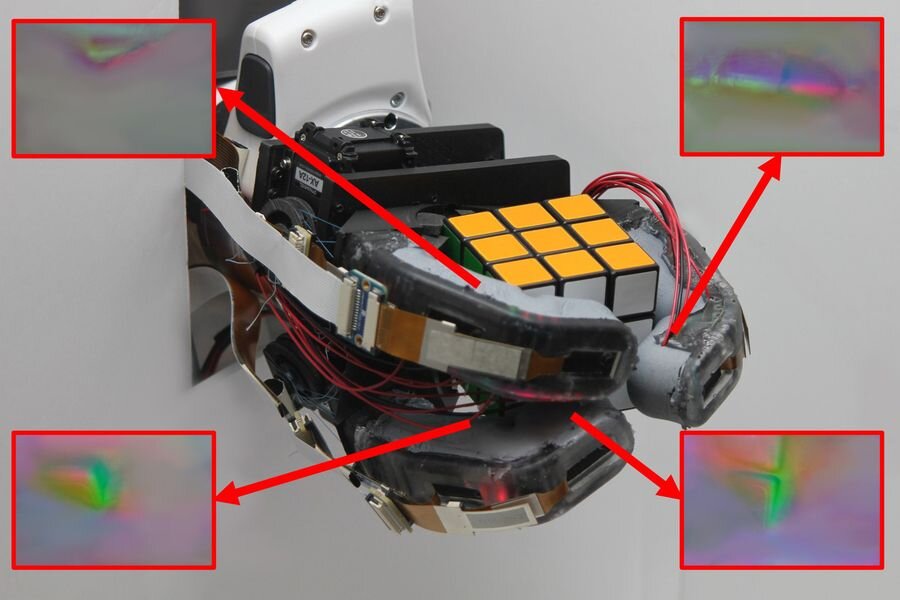
Таков и новый робот от Массачусетского технологического института. Трехпалая роборука создана под руководством профессора факультета мозга и когнитивных наук Эдварда Адельсона (Edward Adelson). Робот способен не только захватить предмет, но и сразу определить его форму за счет чувствительности пальцев по всей длине.
В мягком слое пальца, под его прозрачной силиконовой кожей, расположены высокоразрешающие оптические датчики с видеокамерами, которые собирают информацию о форме зажатого объекта. Сенсоры одновременно получают данные о многих его частях. В результате в 95% случаев один хват дает возможность определить геометрию объекта.
В качестве датчиков инженеры взяли серийные оптические сенсоры GelSight, ранее разработанные в лаборатории профессора Адельсона. Области их зрения, по две на каждый палец, перекрываются, поэтому поле обзора непрерывно по всей длине пальца. При захвате объекта видеокамеры фотографируют изображения кожи, созданные цветными фотодиодами, освещающими ее изнутри. Световую картину на поверхности кожи обрабатывает алгоритм с искусственным интеллектом, обученный распознавать предметы.
При изготовлении кожи инженеры успешно преодолели проблемы отслаивания силикона. Его сделали неоднородным за счет включений, а морщинки на его поверхности прибавили ему долговечности.
Создатели робота планируют добавить датчики на ладони, которые повысят его точность. Инженеры также усовершенствуют материал кожи и нарастят число приводов пальцев, чтобы они были более подвижными. Авторы надеются на промышленные применения руки. Кстати, их разработку частично финансирует автоконцерн «Тойота». Робот может быть полезен и людям с ограниченными возможностями, так как поможет им перемещать разные предметы. Статья о работе выложена в открытый доступ на агрегаторе научных работ arXiv.
И. Иванов
Остальные статьи из этой рубрики вы можете найти в подборке «Результаты: алгоритмы и роботы»
Канал автора: «Новости медицины»
Благодарим за ваши «лайки», комментарии и подписку на наш канал
– Редакция «Химии и жизни»