Страницы: [01] [02] [03] [04] [05] [06] [07] [08] [09] [10] [11]
Страна: СССР.
Название: МСРП.
Тип: Система регистрации режимов полёта.
Самолёт: Ил-18.
Создан: 19??.
Завод: ?.
Отрасль: Производство авиационной техники.

Предназначена для регистрации на магнитной ленте основных параметров полета летательного аппарата и для сохранения записанной информации в случае аварии. Параметры полёта, записанные на магнитную ленту, декодируются на наземном декодирующем устройстве ДУМС (УД-8-ДУМС)
Повествование
РУКОВОДСТВО
ПО ТЕХНИЧЕСКОЙ ЭКСПЛУАТАЦИИ
Настоящее Руководство по технической эксплуатации предназначено для изучения и правильной эксплуатации обслуживающим персоналом измерительной системы регистрации режимов полёта МСРП-12-96(-1)-С2.
В книге изложены основные технические данные, принцип работы, описание принципиальных и функциональных схем блоков, входящих в систему, и инструкция по эксплуатации.
Кроме того, в данном Руководстве изложены основные технические данные, принцип работы и инструкции по эксплуатации наземного декодирующего устройства ДУМС (УД-8-ДУМС), поверочной установки УП-МСРП и устройства перемотки магнитной ленты УПЛ-01.
Приведённые в приложениях 3—15 краткие описания блока питания, датчиков и согласующих устройств, применяемые в комплекте с системой МСРП-12-96(-1)-С2, предназначены для ознакомления обслуживающего персонала с принципом работы и основными техническими характеристиками блока питания, датчиков и согласующих устройств.
При изучении и эксплуатации блока питания, датчиков и согласующих устройств следует также пользоваться паспортами, техническими описаниями и инструкциями по эксплуатации на эти приборы.
Материалы данного Руководства могут быть использованы при составлении инструкции по размещению, проверке и эксплуатации системы МСРП-12-96(-1)-С2 для каждого отдельного типа летательного аппарата (самолёта или вертолёта).
УСЛОВНЫЕ ОБОЗНАЧЕНИЯАЗС— автомат защиты сетиБП-7— блок питания датчиков системы МСРП-12-96БР-40— блок распределительныйДАС, ДАС-2— датчик приборной скорости потенциометрическийДВбП-13, ДВбП-15— барометрические датчики высоты потенциометрическиеДДип (—01 + +0,85)— датчик избыточного давления потенциометрическийДМП-60А, ДМП-100А— датчики давления малогабаритные потенциометрическиеДУМС— декодирующее устройство к измерительной системе регистрации режимов полёта МСРП-12-96ДУСУ-1-30АС— датчик угловых скоростей унифицированныйК12-22— магнитоэлектрический осциллографКЗА— контрольно-записывающая аппаратураКЛ— контрольная лампаКУ— кодирующее устройствоЛМП— лентопротяжный механизмМП-95— датчик перегрузок потенциометрическийМСРП-12-96(-1)— измерительная система регистрации режимов полётаМУ-615А— датчик угловых перемещений потенциометрическийПДУ— пульт дистанционного управленияПО-15— преобразователь оборотовРСАГ 1186А, РСАГ 1186Б— распределитель сигналов авиагоризонтаРЩ, РЩ-1— распределительный щитокСБ-1— соединительный блокССА—0,7÷2,2И— сигнализатор скоростного напораСУ-1(М)— согласующее устройствоУКР-4— уплотнитель разовых командУПЛ-01— устройство для перемотки магнитной лентыУП-МСРП— поверочная установка измерительной системы регистрации режимов полёта МСРП-12-96УПТ— усилитель постоянного токаШИМ-АИМ— преобразователь широтно-импульсной модуляции в амплитудно-импульснуюЭОВ— электронный отметчик времениФРП— фильтр радиопомехРК— разовая командаЛ— электронная лампа (Ла — левая половина, Лб —
правая половина)ЗИП— Запасные части и принадлежности
1. НАЗНАЧЕНИЕ СИСТЕМЫ МСРП-12-96(-1)-С2
Система регистрации режимов полёта МСРП-12-96(-1)-С2 предназначена для регистрации на магнитной ленте основных параметров полета летательного аппарата и для сохранения записанной информации в случае аварии. Параметры полёта, записанные на магнитную ленту, декодируются на наземном декодирующем устройстве ДУМС (УД-8-ДУМС).
Система регистрации режимов полёта МСРП-12-96(-1)-С2 является модернизированным вариантом выпускавшихся ранее систем МСРП-12, МСРП-12-96. Отличие блоков системы МСРП-12-96 от блоков системы МСРП-12 приведены в (п. 1.4) настоящего описания. Системе, укомплектованной РЩ-1 вместо РЩ (РЩ-1 предусматривает регистрацию большего числа разовых команд), присвоено обозначение МСРП-12-96-1. С целью повышения надёжности и улучшения эксплуатационных характеристик в блоки системы МСРП-12-96(-1) введены схемные и конструктивные изменения. Системе МСРП-12-96(-1) и блокам, подвергшимся изменениям, присвоены обозначения МСРП-12-96-С2, МСРП-12-96(-1)-С2, ЛПМ-С2, КУ-С2, РЩ-С2, РЩ-1-С2. Система МСРП-12-96-С2 и входящие в нее блоки полностью взаимозаменяемы с системой МСРП-12-96 и входящими в неё блоками. В дальнейшем по тексту, кроме специально оговоренных случаев, система МСРП-12-96(-1)-С2 и блоки ЛПМ-С2, КУ-С2, РЩ-С2, РЩ-1-С2 именуются системой МСРП-12-96, ЛПМ, КУ, РЩ, РЩ-1.
Примечание: Под обозначениями МСРП-12-96(-1) и РЩ-1 подразумеваются обозначения МСРП-12-96, МСРП-12-96(-1) и РЩ, РЩ-1 соответственно.
2. ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ
1. Число измерительных каналов системы для аналоговых параметров — 12.
2. Частота опроса по каждому каналу —12 Гц.
3. Система рассчитана на работу с потенциометрическими датчиками и согласующими устройствами, выходное напряжение которых изменяется от 0 до 6,3 В.
4. Время непрерывной работы — 30 ч. Запись производится с непрерывным стиранием зарегистрированных сигналов так, что на ленте остаётся информация последних 75 мин. полёта.
5. Суммарная погрешность записи и воспроизведения (с помощью наземного декодирующего устройства ДУМС или аппаратуры УД-8-ДУМС) не выходит за пределы ±3% (без учета погрешности датчиков).
6. Запись производится на магнитную ленту шириной 6,25 мм.
7. Для калибровки измерительного тракта системы один раз в 60 с на входы всех измерительных каналов подаются калибровочные напряжения.
8. Запись временных отметок производится один раз в секунду по 13-му каналу.
9. Система рассчитана на питание от сети постоянного тока напряжением 27 В ±10%. Не допускается питание системы МСРП-12-96(-1) от выпрямителей типа ВСА без сглаживающих фильтров или аккумуляторов, работающих в буфере.
10. Мощность, потребляемая системой, составляет при напряжении 29,7 В:
при выключенном обогреве — 180 Вт;
при включенном обогреве — 250 Вт.
11. Система рассчитана на работу в следующих условиях:
— температура внешней среды ±60°С;
— относительная влажность до 98% при температуре +35 °С;
— механическая вибрация с частотой 20—300 Гц при перегрузках до 4 ед.;
— воздействие линейных перегрузок по вертикальной оси ±4 ед., по двум горизонтальным осям ±1,5 ед.;
— воздействие ударных перегрузок до 4 ед. с частотой 60—80 ударов в минуту;
— атмосферное давление до 41 мм рт. ст.
12. Лентопротяжный механизм помещён в защитный шарообразный контейнер, обеспечивающий сохранность записи при воздействии ударной перегрузки до 100 ед., статической распределенной нагрузки 1000 кгс и теплового удара до +1000°С в течение 10 мин.
13. Кроме аналоговых параметров, система МСРП-12-96 может регистрировать разовые команды (РК). При этом аналоговые параметры и РК могут регистрироваться в различных комбинациях в зависимости от типа летательного аппарата.
Регистрация РК осуществляется двумя способами:
— наложением на аналоговый параметр (регистрируется до 12 разовых команд — при применении блока РЩ или до 24 разовых команд — при применении блока РЩ-1);
— использованием уплотнителей разовых команд типа УКР-4. Каждый УКР-4 по одному измерительному каналу регистрирует до четырёх РК.
3. СОСТАВ СИСТЕМЫ МСРП-12-96(-1)-С2
Состав системы, ее габаритные размеры и весовые характеристики приведены в (табл. 1).
В зависимости от типа летательного аппарата систему МСРП-12-96 (рис. 1) комплектуют одним из распределительных щитков, датчиками и согласующими устройствами согласно сводному паспорту.
В зависимости от состава датчиков и согласующих устройств, входящих в комплект системы МСРП-12-96, к общему обозначению системы добавляется соответствующий буквенный индекс, например, МСРП-12-96-А; при комплектации системы блоком РЩ-1 система обозначается «МСРП-12-96-1» с соответствующим буквенным индексом.
Перечень регистрируемых параметров, типы датчиков и согласующих устройств, которые могут быть использованы в системе МСРП-12-96(-1), приведены в (табл. 2).
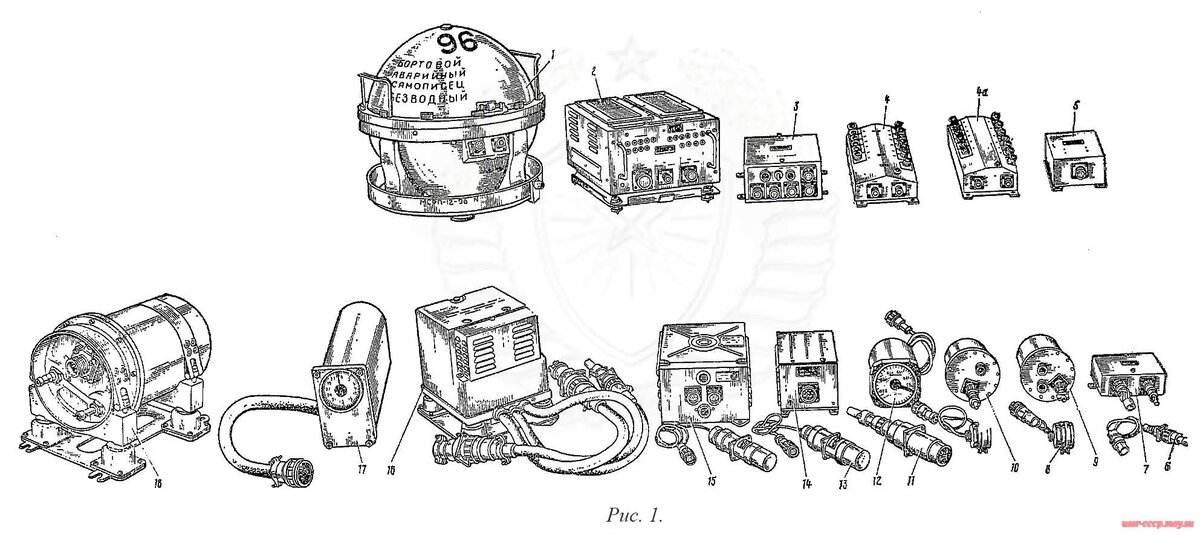
Рис. 1. Система регистрации режимов полёта МСРП-12-96(-1).
1—Лентопротяжный механизм ЛПМ в шаровом контейнере; 2—Кодирующее устройство КУ; 3—Соединительный блок СБ-1; 4—Распределительный шток РЩ; 4а—Распределительный шток РЩ-1; 5—Фильтр радиопомех; 6—Датчик давления ДМП-60А (ДМП-100А); 7—Уплотнитель разовых команд УРК-4; 8—Датчик угловых перемещений МУ-615А; 9—Датчик избыточного давления ДДиП (—0,1...+0,85); 10—Датчик барометрической высоты ДВбП-13 (ДВбП- 15); 11—Датчик угловой скорости ДУСУ-1-30АС; 12—Сигнализатор скоростного напора ОСА-0,7...2,2И; 13—Датчик перегрузок МП-95; 14—Преобразователь оборотов ПО-15; 15—Блок питания БП-7; 16—Распределитель сигналов авиагоризонта РСАГ-1186А (РСАГ-1186Б); 17—Распределительный блок БР-40; 18—Датчик приборной скорости ДАС (ДАС- 2).
4. ОТЛИЧИЕ БЛОКОВ СИСТЕМЫ МСРП-12-96 ОТ БЛОКОВ СИСТЕМЫ МСРП-12
Система МСРП-12-96 выпускается как модернизированный вариант выпускавшейся ранее системы МСРП-12. Модернизации подверглись только ЛИМ и КУ. Остальные блоки (СБ-1, РЩ, ФРИ, а также датчики и согласующие устройства) изменениям не подвергались.
ЛПМ и КУ МСРП-12-96 отличаются промежуточными параметрами от соответствующих блоков МСРП-12.
ВНИМАНИЕ! При необходимости взаимной замены блоков МСРП-12-96 и блоков МСРП-12 допускается только одновременная замена ЛПМ и КУ.
Остальные блоки МСРП-12-96 (СБ-1, РЩ, ФРП) взаимозаменяемы с блоками МСРП-12.
Для эксплуатации системы МСРП-12-96 не требуется никаких изменений монтажных кронштейнов, соединительных кабелей, штепсельных разъёмов и электрических схем внешних соединений, предназначавшихся для эксплуатации МСРП-12.
Внешние отличия ЛПМ системы МСРП-12-96 от ЛИМ системы МСРП-12 следующие:
— на верхней полусфере защитного контейнера выше надписи БОРТОВОЙ АВАРИЙНЫЙ САМОПИСЕЦ черной несмываемой краской нанесена маркировка «96»;
— на нижнем кольце основания защитного контейнера, левее номера ЛПМ, нанесена маркировка «МСРП-12-96»;
— верхняя поверхность основной платы ЛПМ окрашена красно-коричневой эмалью;
— на основной плате, правее шильдика с шифром системы МСРП-12-96, расположен шильдик с маркировкой «96 мм/сек.»;
— на основной плате находится контактное устройство автостопа.
Внешние отличия КУ системы МСРИ-12-96 от КУ системы МСРП-12 следующие:
— передняя панель окрашена красно-коричневой эмалью;
— на шильдике с обозначением шифра «КУ» имеется маркировка «МСРП-12-96»;
— выше шильдика шифром изделия расположен шильдик с маркировкой «96 мм/сек.».
ПРИМЕЧАНИЕ. На шильдиках у остальных блоков системы МСРП-12-96 (СБ-1, РЩ, ФРП) имеется маркировка «МСРП-12».
5. ПРИНЦИП РАБОТЫ СИСТЕМЫ. ОПИСАНИЕ ВЗАИМОДЕЙСТВИЯ БЛОКОВ
5.1. Структурная схема
Сигналы от датчиков и согласующих устройств через РЩ(-1) поступают на входы соответствующих каналов КУ (см. рис. 2). Сигналы от ЭОВ, находящегося в КУ, поступают на вход 13-й кодирующей ячейки. Калибровочные сигналы от калибровочного устройства, расположенного в СБ-1, поступают в КУ.
После кодирования по время-импульсной системе напряжений датчиков, согласующих устройств и отметок времени серия импульсов поступает в ЛПМ для записи на магнитную ленту.
Включение ЛПМ происходит от сигнализатора скоростного напора ССА-—0,7÷2,2И или от концевого выключателя, фиксирующего обжатие стойки шасси.
Для визуальной индикации движения ленты служит контрольная лампа, на которую подаются сигналы от ЛПМ. При нормальном движении магнитной ленты контрольная лампа работает в режиме проблесковой индикации.
Система МСРП-12-96 подключается к бортсети через ФРП. Напряжение питания на блоки системы подаётся через СБ-1.
Питание датчиков и согласующих устройств осуществляется от блока питания БП-7 через РЩ(-1).
В случае отказа бортсети питание системы осуществляется от аварийного источника.
5.2. Функциональная схема
Система МСРП-12-96 осуществляет последовательное кодирование напряжений датчиков, согласующих устройств и отметок времени по время-импульсной системе с последующей записью импульсных сигналов на магнитную ленту.
Запись на магнитную ленту кодированных сигналов осуществляется с помощью магнитных головок ЛПМ.
Напряжения от датчиков и согласующих устройств через контакты реле, управляемые калибровочным устройством, подаются на соответствующие 12 ячеек КУ (см. рис. 3).
Рис. 2. Схема структурная системы МСРП-12-96(-1).
Рис. 3. Схема функциональная системы МСРП-12-96(-1).
Каждая кодирующая ячейка представляет собой ждущий мультивибратор, длительность импульса которого линейно зависит от величины напряжения, поданного на сетку левой половины лампы мультивибратора.
Первая кодирующая ячейка запускается отрицательным импульсом, полученным после дифференцирования положительного импульса с левого анода кадрового мультивибратора.
Последующие кодирующие ячейки запускаются соответственно отрицательными импульсами, полученными при дифференцировании импульса предыдущей кодирующей ячейки.
Последняя, 13-я кодирующая ячейка служит для кодирования отметок времени.
Импульсы, полученные после дифференцирования импульсов всех кодирующих ячеек, поступают на усилитель-смеситель и через схему формирования подаются на записывающее устройство.
Таким образом, формируется система импульсов, расстояния между которыми линейно зависят от напряжений соответствующих датчиков и согласующих устройств.
Для расшифровки записи параметров калибровочное устройство один раз в 60 с отключает датчики от кодирующих ячеек, и на вход ячеек подаются калибровочные напряжения (нуль и максимальное напряжение питания датчиков).
В системе МСРИ-12-96 предусмотрена регистрация РК, которая выполняется с помощью РЩ (-1) с блоком преобразования РК и, при необходимости, уплотнителя разовых команд УКР-4.
Блок преобразования РК представляет собой схему, состоящую из задающего мультивибратора и 12 идентичных ключевых схем (КС). На один из входов такой схемы КС подаётся напряжение РК, на другой —напряжение задающего мультивибратора.
Полученное на входе КС наш управляет записью кодированных напряжений датчиков измерительных каналов. При этом запись получается прерывистой. Частота прерывания определяется частотой следования импульсов задающего мультивибратора.
В систему МСРП-12-96(-1) входят: КУ, ЛПМ, СБ-1, РЩ(-1), ФРП, блок питания БП-7, а также датчики и согласующие устройства.
Питание системы осуществляется от бортсети летательного аппарата при включении тумблера В на СБ-1. ЛПМ начинает работать при достижении самолётом скорости 70 км/час. В наземных условиях включение ЛПМ производится нажатием кнопки ИМИТАТОР ШАССИ РЩ (-1).
Через ФРП напряжение питания поступает на разъём Ш6 СБ-1. Из СБ-1 напряжение бортсети подаётся на все блоки системы:
— через разъём Ш7 СБ-1 на разъём Ш5 ЛПМ;
— через разъём Ш8 СБ-1 на разъём ШЗ КУ;
— через разъём Ш9 СБ-1 на разъём Ш1 БП-7 и контрольную лампу.
Питание датчиков производится от БП-7, подключенного к разъёму ШЗ2 РЩ(-1).
Сигналы от датчиков и согласующих устройств поступают в РЩ(-1) через разъёмы Ш20—Ш31, затем через разъём Ш12 РЩ(-1) на контакты реле Р1, Р2, РЗ и на 12 ячеек КУ (разъём Ш2).
Управление реле Р1, Р2, РЗ КУ происходит с помощью калибровочного устройства, расположенного в СБ-1. Кодирование сигналов отметки времени осуществляется кодирующей ячейкой времени.
Сформированная серия импульсов, расстояния между которыми пропорциональны напряжениям датчиков, подается через разъём Ш1 (КУ) в ЛПМ (разъём Ш4) для записи на магнитную ленту.
Контроль протяжки магнитной ленты проводится с помощью контрольной лампы, сигналы к которой подводятся через СБ-1 (разъём Ш9), и магнитоуправляемый контакт ЛПМ.
В РЩ (-1) РК подаются на четвертые штыри разъёмов Ш20—Ш31 и производится одновременная запись РК и аналогового параметра по выбранному каналу. УКР-4 подсоединяется к одному из разъёмов Ш20—Ш31 РЩ (-1). При этом по выбранному каналу производится запись до четырёх РК в любом сочетании.
В случае отключения бортсети система МСРП-12-96 переключается на аварийное питание.
ПРИМЕЧАНИЕ. Обозначение штепсельных разъёмов указаны для блока РЩ); обозначение соответствующих штепсельных разъёмов для блока РЩ-1 указаны в (разделе 6.5).
6. ОПИСАНИЕ БЛОКОВ СИСТЕМЫ МСРП-12-96(-1)-С2
6.1. Кодирующее устройство
КУ (рис. 4) предназначено для преобразования напряжений, выдаваемых датчиками, согласующими устройствами и ЭОВ, в серию импульсов с время-импульсной модуляцией, где временной интервал между импульсами прямо пропорционален измеряемому параметру.
Принципиальная электрическая схема КУ представлена на (рис. 5).
КУ состоит из кадрового мультивибратора (Л1), 13 кодирующих ячеек (Л2—Л14), усилителя (Л15а), схемы запуска (Л15б) блокинг-генератора, блокинг-генератора (Л16), преобразователя напряжения (транзисторы Т1 и Т2 и трансформатор Тр1) и реле Р1—Р4, через контакты которых подаются калибровочные напряжения.
Временные диаграммы, поясняющие работу КУ, представлены на (рис. 6).
Кадровый мультивибратор (Л1) вырабатывает импульсы прямоугольный формы длительностью 2600 мкс с частотой следования 12 Гц, что и определяет частоту опроса измеряемых параметров. На левом аноде формируется положительный импульс (см. рис. 6, в), на правом аноде — отрицательный импульс (см. рис. 6, а).
Отрицательный импульс с анода лампы Л1б дифференцируется цепочкой С2, R45 (см. рис. 6, б), и через диод Д2 отрицательный импульс, соответствующий по времени переднему фронту кадрового импульса, поступает на сетку усилителя-смесителя (Л15а). Полученный импульс является вторым импульсом формируемой системы импульсов.
Временной интервал между первым и вторым импульсом системы постоянный и равен 2600 мкс. Он служит для формирования импульса сброса счетчика в ДУМС. Одновременно положительный импульс анода Л1а дифференцируется цепочкой С17, R101, и через диод Д16 отрицательный импульс поступает на анод Л2а, т. е. на запуск первой кодирующей ячейки.
Кодирующая ячейка представляет собой ждущий мультивибратор с катодной связью. В исходном состоянии Лб открыта, Ла закрыта. Это состояние мультивибратора является устойчивым, из которого он переводится в неустойчивое после воздействия на анод Ла отрицательного импульса. Время нахождения мультивибратора в неустойчивом состоянии, т. е. длительность импульса, вырабатываемого им, определяется параметрами схемы и управляющим напряжением датчика, подаваемым на сетку Ла, Соответствующим выбором элементов схемы и режимов работы лампы обеспечивается линейная зависимость длительности импульса ждущего мультивибратора от напряжения датчика.
Таким образом, отрицательным импульсом (см. рис. 6, г) запускается первая кодирующая ячейка, и на аноде Л2б вырабатывается положительный импульс (см. рис. 6, д), длительность которого пропорциональна величине измеряемого параметра. Причём, минимальному напряжению датчика (U =0) соответствует длительность импульса tмин=1750 мкс, максимальному напряжению (U —6,3 В) — длительность импульса tмакс =3900 мкс.
Положительный импульс с анода Л2б дифференцируется цепочкой СЗ, R46 (см. рис. 6, е), и через диод ДЗ отрицательный импульс, соответствующий по ‘времени заднему фронту импульса первой кодирующей ячейки, поступает на сетку усилителя-смесителя (Л15а). Полученный импульс является третьим импульсом формируемой системы импульсов, а временной интервал между вторым и третьим импульсом пропорционален величине измеряемого параметра по первому каналу.
Одновременно положительный импульс с анода Л2б дифференцируется также цепочкой С21, R102, и отрицательный импульс (см. рис. 6, е) через диод Д17 поступает на анод ЛЗ. На ЛЗ собрана вторая кодирующая ячейка, которая вырабатывает положительные импульсы (см. рис. 6, ж), длительность которых пропорциональная величине напряжения датчика второго канала. Положительный импульс с анода Л3б дифференцируется цепочкой С4, R47 (см. рис. 6, з), и через диод Д4 отрицательный импульс, соответствующий по времени заднему фронту импульса второй кодирующей ячейки, поступает на сетку усилителя-смесителя (Л15а). Полученный импульс является четвёртым импульсом системы, а временной интервал между третьим и четвертым импульсом пропорционален величине напряжения датчика второго канала.
Одновременно положительный импульс с выхода второй кодирующей ячейки дифференцируется также цепочкой С24, R103, и отрицательным импульсом через диод Д18 запускается третья кодирующая ячейка.
Таким образом, запуск каждой последующей ячейки осуществляется отрицательным импульсом, полученным после дифференцирования положительного импульса, вырабатываемого предыдущей кодирующей ячейкой.
Рис. 4. Кодирующее устройство КУ с отсоединёнными монтажным основанием и боковой планкой.
1—Кожух; 2—Отверстия для доступа к потенциометрам, с помощью которых осуществляется регулировка tмин; 3—Лицевая панель ; 4, 5 и 6—Штепсельный разъём; 7—Замок; 8—Нодки кожуха; 9—Монтажное основание; 10—Отверстия монтажного основания фиксирующие ножки кожуха; 11—Амортизаторы; 12—Отверстия для доступа к потенциометрам, с помощью которых осуществляется регулировка tмах; 13—Планка.
Рис. 5. Кодирующее устройство, схема электрическая принципиальная.
*Резисторы подбираются при настройке.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ
(к кодирующему устройству, схемы электрической принципиальной)
Рис. 6. Временные диаграммы работы кодирующего устройства КУ.
Последняя кодирующая ячейка (Л14) служит для кодирования сигналов отметки времени. Управляющее напряжение подаётся от ЭОВ, представляющего собой мультивибратор в автоколебательном режиме с периодом следования импульсов 1 с с длительностью 0,5 с, причём, наличию сигнала отметки времени соответствует длительность импульса tмакс=3900 мкс, отсутствию отметки времени — tмин=1750 мкс.
Для облегчения регулировки часового канала с помощью УП-—МСРИ в схему введён контакт В при замыкании которого от ЭОВ постоянно подаётся сигнал, соответствующий tмакс.
После поочерёдного срабатывания кодирующие ячейки приходят в устойчивое состояние, в котором находятся до прихода следующего запускающего импульса от кадрового мультивибратора.
Положительные импульсы с анодов Лб дифференцируются цепочками С3, R46; С4, 47; ...С15, R58 и на вход усилителя-смесителя (Л15а) через диоды ДЗ—Д15 поступает серия из 15 отрицательных импульсов (см. рис. 6, л), расстояния между которыми пропорциональны напряжениям датчиков.
С выхода усилителя серия, состоящая из 15 положительных импульсов (см. рис. 6, м), поступает на схему запуска (Л15б) блокинг-генератора (Л16), работающего в ждущем режиме. Отрицательными импульсами (см. рис. 6, н), поступающими с выхода схемы запуска, запускается блокинг-генератор, который вырабатывает отрицательные импульсы длительностью 3 мкс и амплитудой 80—100 В (см. рис. 6, о). Сформированная серия из 15 импульсов отрицательной полярности подаётся на магнитную головку ЛПМ для записи на магнитную ленту.*
Блок питания (транзисторы Т8, Т9 — мультивибратор, Т5 — широтноимпульсный модулятор, Т6, Т11 — предварительный каскад и Т1 Т2 — ключевой каскад с трансформатором Тр1 усилителя мощности) представляет собой однотактный преобразователь напряжения +27 В постоянного тока в стабилизированные вторичные напряжения ~6,3 В переменного тока для питания цепей накала р/ламп, 150 В постоянного тока при питании анодов р/ламп, -27 В постоянного тока для питания цепей блокинг-генератора.
Работа блока питания описана в (разделе 4 приложения 1) к настоящему руководству по технической эксплуатации.
Реле на транзисторах Т12, Т13, Т14, реле Р5 и конденсаторе С73 предназначено для задержки на время от 0,5 до 1,5 минуты включения анодного напряжения р/ламп с целью облегчения их работы при прогреве.
Для расшифровки записанной информации периодически, один раз за 60 с, производится подача калибровочных напряжений от блока питания типа БП-7. Это осуществляется с помощью калибровочного устройства, включающего реле Р1—Р4. Сначала срабатывают реле Р1, Р2, РЗ, при этом на все каналы одновременно подаётся минимальное напряжение, что должно соответствовать длительности импульсов 1750 мкс. Через 0,7 с подаётся питание (27 В) на реле Р4, после срабатывания которого на все каналы подаётся максимальное напряжение (6,3 В), что должно соответствовать длительности импульсов 3900 мкс. Через 0,7 с обесточиваются реле Р1, Р2, РЗ и отключаются калибровочные напряжения. Регулировка минимальной и максимальной длительностей импульсов кодирующих ячеек производится с помощью потенциометров R59—R70 (установка 1750 мкс) и R77—R88 (установка 3900 мкс).
На (рис. 7) представлены диаграммы, поясняющие работу КУ в момент подачи калибровочных напряжений.
КУ (рис. 4) состоит из каркаса, в котором установлены шасси, радиатор с транзисторами, двойные платы с элементами кодирующих ячеек, лицевой панели 3 и кожуха 1. На шасси установлены силовой трансформатор и элементы схемы преобразователя напряжения.
На лицевой панели находятся три штепсельных разъёма:
разъём 6 служит для подключения датчиков;
разъём 5 — для передачи импульсов на магнитные головки ЛПМ;
разъём 4 — подключает напряжение питания 27 и напряжения от калибровочного устройства к кодирующим ячейкам.
На лицевой панели установлены контрольные гнезда для проверки:
— кадрового мультивибратора (А и Б};
— усилителя-смесителя и блокинг-генератора (С);
— кодирующих ячеек (1—13);
— анодного напряжения питания (+150 В);
— напряжения запирания блокинг-генератора (—27 В).
Собранный каркас с лицевой панелью закреплен в кожухе винтами.
Кожух имеет жалюзи для охлаждения и маркированные отверстия 2, 12 с двух сторон для настройки кодирующих ячеек, (нижний ряд — для регулировки tмакс, верхний ряд — для регулировки tмин).
Для устранения возможности неквалифицированной подрегулировки кодирующих ячеек отверстия закрыты планками 13, которые при необходимости регулировки снимают. После регулировки планки устанавливают на место и пломбируют краской.
На дне кожуха имеются четыре ножки 8, которые одновременно служат фиксаторами при установке КУ в отверстия 10 на основании 9 с амортизаторами 11. КУ удерживается на основании замком 7.
Рис. 7. Временные диаграммы работы кодирующего устройства КУ в момент подачи калибровочных напряжений.
Рис. 8. Лентопротяжный механизм ЛПМ в защитном контейнере (верхняя полусфера поднята).
1—нижняя полусфера контейнера; 2—верхняя полусфера контейнера; 3—поворотное кольцо запорного устройства; 4—кронштейн-упор; 5—болт замка; 6—гайка замка; 7—фиксатор; 8—захват; 9—вырез; 10—ключ.
6.2. Лентопротяжный механизм
6.2.1. Назначение, принцип действия, конструкция
Н а з н а ч е н и е
ЛПМ в защитном контейнере служит для записи и сохранения информации о режимах полета на магнитной ленте.
П р и н ц и п д е й с т в и я
Принцип записи электрических сигналов магнитным способом основывается на свойстве магнитных веществ сохранять остаточную намагниченность после того, как удалено поле, вызвавшее её.
В обмотке головки возникает э.д.с., пропорциональная скорости изменения потока, пронизывающего сердечник. Таким образом, магнитная запись обладает той особенностью, что принципиально невозможно воспроизвести записанные сигналы, изменяющиеся с малой частотой (порядка 1—5 Гц).
Большинство же процессов, подлежащих записи во время полёта летательных аппаратов, изменяются именно с малой частотой. Поэтому непосредственная запись на магнитную ленту напряжений датчиков полностью исключается.
Применение КУ позволяет исключить необходимость точной передачи формы записанного импульса, достаточно записать лишь сигнал, указывающий на временное положение этого импульса. С помощью формирующих блоков таким импульсным сигналам можно придать нужную форму.
В системе МСРП-12-96 длительность записываемых импульсов порядка 3 мкс. Ширина щели магнитной головки 10—15 мкм.
ЛПМ построен по однодвигательной схеме.
Кассеты ЛПМ расположены одна над другой. Для уменьшения детонации и повышения стабильности средней скорости применён петлевой тракт, при котором прижим ленты к ведущему валу осуществляется двумя прижимными роликами (с двух сторон вала). ЛМИ имеет одну скорость протяжки ленты — 96 мм/с. Кассета вмещает 250 м ленты, что обеспечивает 38 мин. записи в одну сторону и 38 мин. в обратном направлении, т. е. общее время записи составляет 75 мин. Нестабильность средней скорости протяжки ленты не выходит за пределы ±1%, что обеспечивается системой стабилизации натяжения ленты, работающей от следящего щупа. ЛПМ работает непрерывно в течение всего полёта и сохраняет запись последних 75 мин. полёта. При закрытии крышки ЛПМ прибор включается нажатием рычага концевого выключателя 1 (рис. 9) независимо от положения переключателя 2.
Принципиальная электрическая схема ЛПМ представлена на (рис. 10). Серия импульсов от КУ подаётся на головки записи через контакты 1, 2 разъёма Ш4. Постоянное напряжение 27 В подаётся на головки подмагничивания через контакты 3, 4 разъёма Ш5.
Резистор R8 служит для установки требуемого тока в обмотках головок подмагничивания. Одновременно напряжение 27 В подаётся на электронагревательный элемент ЭН и термореле Р9 через контакты 1, 3 разъёма Ш5.
Движок потенциометра R5, механически связанный со следящим щупом, при работе ЛПМ: перемещается от одного крайнего положения к другому. При этом, по мере сматывания магнитной ленты с одной кассеты на другую, ток обмотки муфты первой кассеты уменьшается, а второй увеличивается.
Потенциометр R5 позволяет получать необходимые зависимости токов обмоток муфт от диаметра рулона ленты на нижней кассете.
Резисторы R6 и R7 служат для установки начального тока через обмотки муфт. Управление ЛПМ автоматическое. На концах магнитной ленты имеются Участки длиной 200—220 мм с нанесенной на них токопроводящей краской.
На основной плате ЛПМ установлены два направляющих изолированных ролика, к которым последовательно подключены обмотки 1, 10 и 5, 6 поляризованного реле Р1. При нахождении металлизированного (покрытого токопроводящей краской) слоя магнитной ленты через ролики происходит реверс электродвигателя.
Элементы схемы изображены на (рис. 10) в момент отсутствия напряжения питания. При закрытом ЛШМ контакты микровыключателя В2 замкнуты. При подаче напряжения 27 В срабатывает реле Р2 и замыкает свои контакты 4 и 5, тем самым подготавливая прибор к автоматической работе, включается электродвигатель М, срабатывает электромагнит ЭМ1 прижимных роликов и электромагниты ЭМ2 и ЭМЗ, разобщая ведущую и ведомую части муфт.
Индукционные обмотки муфт ЭМ4, ЭМ5 включаются с подачей напряжения 27 В постоянного тока и создают моменты на кассетах при движении магнитной ленты. Для обеспечения постоянства моментов на муфтах при колебаниях напряжения питания обмотки муфт записываются через стабилизатор напряжения. Схема представляет собой однокаскадный последовательного типа стабилизатор с питанием стабилитрона от входного напряжения.
Рис. 9. Лентопротяжный механизм ЛПМ, частично вынутый из нижней полусферы защитного контейнера.
1—рычаг концевого выключателя; 2—переключатель; 3—основная плата; 4—плата привода; 5—нижняя кассета; 6—технологические колонки; 7—штанги обдува; 8—вилка штепсельного разъёма.
Стабилизированное диодами ДЗ, Д4 напряжение приложено к базе регулирующего элемента эмиттерного
повторителя, выполненного на транзисторах Т1 Т2, включенных по схеме составного транзистора. Резистор R2 является балластным для стабилитронов ДЗ, Д4; резистором R1 задаётся необходимый режим работы транзистора Т2 при изменениях температуры окружающей среды. Реле Р8 (контакты 3, 5) с последовательно включенным диодом Д6 служит для защиты транзисторов Т1, Т2 от пробоя при неправильной подаче полярности напряжения при проверках ЛПМ в наземных условиях. Диод Д2 обеспечивает форсированное отключение реле Р8 при выключении питающего напряжения.
При включении ЛПМ движение магнитной ленты происходит в том же направлении, в котором оно осуществлялось перед предшествующим выключением. Запоминание направления движения магнитной ленты в момент выключения ЛПМ осуществляется с помощью поляризованных реле.
При попарном замыкании контактов К2 и КЗ с контактом Э (направляющих роликов) металлизированным слоем магнитной ленты происходит переключение поляризованных реле, чем обеспечивается реверсирование ЛПМ.
Реле Р1, Р4, Р5, Р10 служат для изменения моментов на электромагнитных муфтах при реверсе, для переключения головок записи и подмагничивания с нижней дорожки на верхнюю при реверсе и для переключения двигателя.
На основной плате укреплено контактное устройство 1 (рис. 12) автостопа.
Автостоп состоит из контактного выключателя, контакты которого замыкаются при обрыве или ослаблении натяжения магнитной ленты до величины менее 10 гс, электронной схемы задержки выключения ЛПМ, собранной на транзисторах ТЗ, Т4, реле Р6 и исполнительного реле Р7.
При ослаблении натяжения магнитной ленты замыкаются контакты КВ, срабатывает реле Р7 и отключает питание ЛПМ. В момент выключения происходит устранение ослабления магнитной ленты за счет проворачивания кассет при срабатывании тормозов электромагнитных муфт, контакты КВ размыкаются, реле Р7 обесточивается и включает питание ЛПМ.
Таким образом, при ослаблении натяжения магнитной ленты ЛПМ работает в режиме последовательных включений и выключений. Если ослабление магнитной ленты длится кратковременно (менее 3 с), то после устранения ослабления ленты ЛПМ продолжает нормально работать. Если причина, вызывающая ослабление магнитной ленты, имеет постоянный характер, то после нескольких циклов «выключение—включение» ЛПМ останавливается. При обрыве магнитной ленты ЛПМ останавливается сразу.
Для повторного включения ЛПМ после срабатывания автостопа необходимо выключить и повторно включить питание ЛПМ с помощью имитатора шасси на РЩ(-1) или выключателя ПРОВЕРКА в самолёт-
ной схеме.
Переключатель В1 предназначен для настройки и проверки прибора в лабораторных условиях и имеет три положения: ВЫКЛ., НАМОТКА и АВТ. Перед установкой верхней полусферы контейнера его необходимо поставить в положение АВТ.
После закрытия ЛПМ верхней полусферой контейнера происходит его автоматическое включение с помощью микровыключателя В2.
Кнопка Кн служит для промежуточного реверса ЛПМ при движении магнитной ленты на нижнюю кассету с целью обеспечения ее намотки на верхнюю кассету. В положении НАМОТКА переключателя В1, при магнитной ленте, установленной в тракте на перемотку (см. рис. 16) и после нажатия кнопки Кн происходит ускоренная намотка ленты на верхнюю кассету. Это достигается за счет того, что обмотка электромагнита прижимных роликов и электромагнита тормоза муфты верхней кассеты в этом режиме обесточены.
К контактам 1 и 3 разъема Ш5 подключены цепи обогрева и обдува ЛПМ. Электрическая схема обогрева работает следующим образом.
С подачей напряжения 2—27 В, если температура ниже 10°С, включается электронагревательный элемент ЭН через термореле Р9. При температуре свыше 20°С термореле Р9 включает электромагнит ЭМ6, открывающий клапан обдува. Для предохранения двигателя М от больших токов при заторможенном режиме в его якорную цепь включён предохранитель Пр.
Кинематическая схема ЛПМ представлена на (рис. 11).
Привод ЛПМ состоит из электродвигателя 11 стабилизированной скорости, редуктора, выходного вала 10, маховика 5, электромагнитных муфт (индукционных муфт скольжения) 12 и двух кассет 1, связанных через шестерёночные пары 17, 18 с ведомыми частями электромагнитных муфт.
Рис. 11. Схема кинематическая лентопротяжного механизма ЛПМ.
1—касса; 2—пассик электромагнитных муфт; 3—прижимные ролики; 4—электромагнит (ЭМ1); 5—маховик; 6—пассик привода; 7 и 9—шкив; 8—выходной вал; 10—выходной вал; 11—электродвигатель (М); 3—прижимные ролики; 12—электромагнитые муфты; 13—якорь; 14—фрикцион; 15—штифт; 16—обмотка электромагнита (ЭМЗ); 17—шестерня; 18—зубчатое колесо; 19—резистор (R5); 20—следящий щуп.
Крутящий момент электродвигателя передаётся через редуктор на два выходных вала 8, 10, которые вращаются с постоянной скоростью. С помощью шкивов 7, 9, установленных на них, и резиновых пассиков 2, 6 они приводят во вращение ведущие части электромагнитных муфт и маховик с ведущим валом. Шкив, приводящий во вращение электромагнитные муфты, вращается с постоянной скоростью в одном направлении, независимо от направления движения магнитной ленты. Сцепление магнитной ленты с ведущим валом обеспечивается двумя прижимными роликами 3, управляемыми электромагнитом 4.
Постоянство натяжения магнитной ленты независимо от изменения диаметров рулонов ленты на кассетах обеспечивается автоматической регулировкой токов электромагнитных муфт с помощью резистора 19, движок которого механически связан со следящим щупом 20. Положение следящего щупа определяется диаметром рулона ленты на нижней кассете. При сматывании ленты ведомая часть муфты сматывающей кассеты вращается в сторону, противоположную ведущей её части. В то же время и ведомая и ведущая части наматывающей кассеты вращаются в одну и ту же сторону. По мере перехода ленты со сматывающей кассеты на наматывающую скольжение обеих муфт возрастает, а следовательно, возрастают и передаваемые ими моменты.
Так как для постоянства натяжения необходимо, чтобы передаваемый муфтой момент изменялся пропорционально диаметру рулона ленты, то с помощью движка резистора, связанного со следящим щупом, ток муфты сматывающей кассеты уменьшается, а приёмной увеличивается. При токе порядка 100 мА и разности частот вращения ведущей и ведомой частей муфт около 8 об/с передаваемый момент муфты равен 250 гс. см.
В указанной электромагнитной муфте имеется электромагнит, который состоит из обмотки 16, питаемой постоянным током, якоря 13 с фрикционом 14 и пружины со штифтами 15. При отсутствии тока в об- мотке электромагнита якорь с фрикционом прижат пружиной к ведущей части муфты, обеспечивая жёсткое сцепление обеих её частей.
К о н с т р у к ц и я
Все узлы ЛПМ наполнены на двух платах: основной 3 (рис. 9) и плате 4 привода.
Основная плата служит для крепления ЛПМ к нижней полусфере 1 (см. рис. 8) контейнера и является несущей платой ЛПМ.
На основной плате размещены:
- кассетный механизм (см. рис. 12);
- узел слежения с щупом 2;
- стойки 1 (рис. 13) для крепления платы привода;
- электромагнитное реле;
- стабилизатор напряжения;
- электронагревательный элемент;
- термореле.
Кассетный механизм с помощью кронштейна 2 крепится на основной плате и включает в себя две электромагнитные муфты 3, ведомые части которых связаны с подкассетниками 4 (см. рис. 12) с помощью зубчатых передач.
Устройство для протяжки магнитной леты включает в себя ведущий вал 5 с маховиком 6, прижимные ролики 7 с электромагнитом, направляющие ролики 8 и блок магнитных головок с крышкой 9. Выводы обмоток магнитных головок подаются на контакты двух реле, расположенных под блоком магнитных головок.
Узел слежения включает в себя шуп 2, следящий за изменением диаметра рулона магнитной ленты на нижней кассете, и потенциометр 4 (см. рис. 13).
Для прогрева ЛПМ при работе в условиях пониженной температуры на основной плате установлен электронагревательный элемент и терморегулятор.
На плате привода находятся: электродвигатель 5 с редуктором 6, реле, клапан обдува 7 с электромагнитом 8, шланги обдува 9, потенциометры 10.
Плата привода крепится на колонках основной платы тремя гайками с пружинными шайбами. Для уменьшения воздействия вибрации платы привода на основную плату крепление осуществляется с помощью резиновых амортизаторов 11 и ограничительных шайб 12.
Электрическое соединение элементов, расположенных на основной плате и плате привода, осуществляется через штепсельный разъём, состоящий из вилки 13 и розетки.
Крепление кассет на подкассетниках осуществляется с помощью специальных винтов 10 (см. рис. 12).
Для коммутации цепи питания сигнальной лампы применяются герметичные магнитоуправляемые контакты, включение которых осуществляется с помощью постоянного магнита, укрепленного эксцентрично на роторе, приводом во вращение направляющим роликом 11. При приближении магнита к контактам последние замыкаются и замыкают цепь питания сигнальной лампы; при удалении магнита контакты размыкаются и разрывают цепь питания сигнальной лампы.
Рис. 12. Лентопротяжный механизм ЛПМ на технологических колонках (смазка верхнего подшипника тонвала и кассетного механизма).
1—контактное устройство автостопа; 2—следящий щуп; 3—вал кассетного механизма; 4—подкассетники; 5—ведущий вал (тонвал); 6—маховик; 7—прижимные ролики; 8—направляющие ролики; 9—крышка блока магнитных головок; 10—винты для крепления кассет; 11—направляющий ролик, связанный с ротором механизма сигнализации.
Рис. 13. Лентопротяжный механизм ЛПМ с отсоединённой платой привода (смазка нижнего подшипника тонвала).
1—стойка для крепления платы привода; 2—кронштейн; 3—электромагнитные муфты; 4—потенциометр следящей системы; 5—электродвигатель; 6—редуктор; 7—клапан обдува; 8—электромагнит канала обдува; 9—штанги обдува; 10—потенциометры для регулировки натяжения магнитной ленты; 11—амортизатор. 12—ограничительные шайбы; 13—вилка штепсельного разъёма; 14—пассик электромагнитных муфт; 15—плата привода; 16—крышки контактной группы электромагнитных муфт; 17—контакты электромагнитных муфт.
Рис. 14. Конструкция крепления защитного контейнера лентопротяжного механизма ЛПМ к монтажному основанию.
1—стопорный винт; 2—скоба; 3—основание контейнера; 4—монтажное основание; 5—стойка монтажного основания; 6—кронштейн.
Рис. 15. Схема заправки магнитной ленты в рабочий тракт лентопротяжного механизма ЛПМ.
П р и м е ч а н и е: Мелким штрихом обозначен рабочий слой ферромагнитной ленты.
Рис. 16. Смазка редуктора на плате привода лентопротяжного механизма ЛПМ.
П р и м е ч а н и е: Крышка смазочного окна снята.
Рис. 17. Двигатель на плате привода лентопротяжного механизма ЛПМ.
1—паз; 2—щётка; 3—паз щёткодержателя; 4—пружина; 5—щёткодержатель; 6—хомут (сдвинут вправо), 7—стойка; 8—стакан (снят).
6.2.2. З а щ и т н ы й к о н т е й н е р
Защитный контейнер (рис. 8) состоит из трёх оболочек: ударо-жаропрочной, оболочки-поглотителя с содой (двууглекислым натрием) и теплоизоляционной.
Ударо-жаропрочная оболочка выполнена в виде двух полусфер, соединённых между собой запорным устройством. Полусферы изготовлены из тонких листов стеклоткани, которые пропитаны теплостойкими смолами и покрыты огнеупорным лаком.
Внутренняя теплоизоляционная оболочка выполнена из теплостойкого пенопласта.
Оболочка-поглотитель тепловой энергии выполнена в виде верхнего и нижнего полусферических сосудов. Каждый сосуд состоит из двух металлических полусфер, пространство между которыми заполнено содой. Пробки клапанов изготовлены из легкоплавкого сплава.
Под воздействием высокой температуры двууглекислый натрий оболочки-поглотителя разлагается, выделяя углекислый газ, поглощает тепло в районе контейнера.
6.2.3. З а п о р н о е у с т р о й с т в о
Запорное устройство защитного контейнера состоит из запирающего поворотного кольца 3 (см. рис. 8) с установленным на нём кронштейном-упором 4, гайки 6 с болтом 5 замка.
При установке верхней полусферы контейнера на нижнюю она фиксируется с помощью фиксаторов 7, закрепленных на нижней полусфере.
Болт 5 имеет головку с отверстиями под ключ 10. При ввинчивании в гайку замка болт давит на кронштейн-упор и поворачивает кольцо 3. При этом скошенные стороны вырезов 9 поворотного кольца входят в пазы захватов 8 кольца. Происходит стягивание полусфер.
Герметичность соединения обеспечивается наличием резиновой уплотнительной прокладки.
При установке контейнера на монтажное основание 4 (см. рис. 14) стопорный винт 1 торцевым отверстием фиксирует стойку 5 монтажного основания, предотвращая поворот контейнера относительно основания и перемещения стоек 5 в фигурных отверстиях основания 3 контейнера.
6.3. Соединительный блок
СБ-1 (рис. 18) предназначен для подключения системы МСРП-12-96 к бортсети напряжением 27 В, переключения на аварийное питание в случае отказа бортсети и калибровки измерительного тракта системы.
Принципиальная электрическая схема СБ-1 представлена на (рис. 19).
В СБ-1 входит калибровочное устройство для подачи калибровочных напряжений в КУ (транзисторы Т4—Т12 и реле Р4—Р6).
При включении бортсети (тумблер В замкнут) напряжение бортсети подаётся на все блоки системы через соответствующие штепсельные разъёмы. Одновременно обеспечивается «дежурство» на всех блоках системы
напряжения аварийного источника (напряжение аварийного источника всегда ниже напряжения бортсети, и поэтому питание системы осуществляется от бортсети).
При обрыве бортсети питание системы обеспечивается от аварийного источника питания (Ш15).
Для развязки аварийного источника и бортсети в схему введены диоды Д1 и Д2.
Калибровочное устройство состоит из трех однотипных схем электронных реле времени.
Работа электронного реле времени происходит следующим образом:
При подаче напряжения бортсети на СБ-1 происходит заряд конденсатора С4 через цепочку RЗ—Д5, а затем его разряд через резистор R12. В начале разряда С4 транзисторы Т4;-Т5, Т6 закрыты за счёт воздействия на эмиттер Т5 положительного потенциала, образующегося при протекании тока разряда С4 по резистору R12. Через 60 с, вследствие уменьшения силы разрядного тока, уменьшается положительный потенциал эмиттера Т5, транзисторы Т5, Т4, Т6 открываются и срабатывает реле Р4. При срабатывании Р4 через замкнутые контакты 3—5
1Р4 и резистор R22 происходит заряд конденсатора С6 — начинает работать реле времени на транзисторах Т10, Т11, Т12 и. т. д.
Схема на транзисторах Т4—Т6 и реле Р4 обеспечивает подачу на КУ калибровочных напряжений один раз в 60±20 с (подача напряжения на реле Р1, Р2, РЗ в КУ). Схемы на транзисторах Т7—Т9, реле Р5 и транзисторах Т10—Т12 и реле Р6 обеспечивают подачу напряжения на реле Р4 в КУ на время 0,7—1,5 с через 0,7—1,5 с после срабатывания реле Р4. После этого вся схема приходит в исходное состояние и цикл повторяется через 60 с.
Реле РЗ предназначено для обеспечения возможности переключения системы на аварийное питание с основного питания.
Все элементы, составляющие электронную схему СБ-1, смонтированы на плате, укрепленной на колонках основания винтами. Остальные элементы конструкции — предохранители, штепсельные разъёмы и тумблер включения размещены на угольнике, закрепленном на основании. Сверху СБ-1 закрывается кожухом, крепящимся
двумя винтами, один из которых пломбируется.
Рис. 18. Соединительный блок СБ-1.
1—кожух; 2—ушко для пломбирования тумблера; 3—тумблер В; 4—винты; 5—лапки с отверстиями для крепления СБ-1; 6—штепсельные разъёмы Ш7, Ш8 и Ш9; 7—предохранитель Пр2 основного питания; 8—штепсельные разъём Ш6 основного питания; 9—предохранитель Пр1 аварийного питания, 10—штепсельные разъём Ш15 аварийного питания.
Рис. 19. Принципиальная электрическая схема соединительного блока СБ-1.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ
(к принципиальной электрической схеме соединительного блока СБ-1).
6.4. Распределительный щиток РЩ
РЩ (рис. 20) предназначен для подключения датчиков и согласующих устройств к БП-7 и КУ, для включения ЛПМ на земле с помощью кнопки ИМИТАТОР ШАССИ и для преобразования и коммутации по 12 измерительным каналам сигналов 12 РК.
Через РЩ происходит включение ЛИМ в момент обжатия шасси или подачи сигнала от ССА. При этом реле Р13 (рис. 21) обесточивается, и контакты его замыкают цепь питания ЛПМ.
Для имитации обжатия шасси или ССА в лабораторных условиях служит кнопка КН, при нажатии на которую размыкается цепь питания реле Р13.
Блок преобразования РК состоит из задающего мультивибратора, работающего в автоколебательном режиме, и ключевой схемы.
Задающий мультивибратор, собранный на транзисторах Т4 и Т5, вырабатывает импульсы прямоугольной формы длительностью 0,4 с с периодом 4 с. С выхода мультивибратора импульсы через усилитель (транзистор ТЗ) поступают на электронный ключ (транзистор Т1), который на время 0,4 с в соответствии с периодом работы мультивибратора замыкает минусовую цепь питания реле Р1—Р12.
В нормальном состоянии, соответствующем отсутствию РК, обмотки реле Р1—Р12 обесточены, и на вход КУ подаются напряжения датчиков, пропорциональные аналоговым параметрам.
При появлении РК на соответствующее реле подаётся напряжение +27 В. В момент замыкания электронного ключа реле срабатывает, при этом вход кодирующей ячейки заземляется. Через 0,4 с электронный ключ размыкает минусовую цепь реле, обмотка реле обесточивается, и схема приходит в исходное состояние. На вход КУ подаётся сигнал от датчиков аналоговых параметров.
Таким образом, при регистрации РК получается пунктирная запись измеряемого параметра путём наложения на него релейных сигналов датчиков РК. Частота прерывания записи определяется частотой следования задающего мультивибратора.
Основной деталью конструкции РЩ является коробка 5 (см. рис. 20), на которой крепятся все конструктивные элементы.
На наружной стороне коробки установлены кнопка ИМИТАТОР ШАССИ и штепсельные разъёмы.
Внутри коробки находится монтажная плита блока преобразования РК, крепящаяся винтами.
У основания коробки имеются лапки с отверстиями для крепления на летательном аппарате. Предохранители Пр1÷Пр12 (см. рис. 21), предназначенные для защиты БП-7 в случае короткого замыкания одного из датчиков, смонтированы на плате, расположенной под крышкой (на тыльной стороне РЩ).
6.5. Распределительный щиток РЩ-1
РЩ-1 предназначен для подключения датчиков и согласующих устройств БП-7 и КУ, для преобразования и коммутации по измерительным каналам сигналов РК. и для включения ЛПМ на земле от «Имитатора шасси».
Через РЩ-1 происходит включение ЛПМ в момент обжатия шасси или подачи сигнала от ССА.
Для имитации сигналов обжатия шасси или ССА в лабораторных условиях служит кнопка «Кн».
РЩ-1 осуществляет преобразование и коммутацию по 12 измерительным каналам 24 РК.
В состоянии, соответствующем отсутствию РК на вход КУ подаются напряжения датчиков, пропорциональные сигналам аналоговых параметров.
Первая группа РК (1÷12) преобразуется и коммутируется с обеспечением записи на осциллограмме в виде разрыва аналогового параметра до уровня «0» В (см. рис. 42).
Вторая группа РК (13÷24) преобразуется и коммутируется с обеспечением записи на осциллограмме в виде разрыва аналогового параметра до уровня 6,3 В.
Таким образом сигнал РК, по каналам 2÷5, 7÷12 имеют вид импульсов отрицательной и положительной полярности длительностью 0,4 с, следующих через 4 с, причём сдвиг между импульсами отрицательной и поло-
жительной полярности составляет 2 с.
Сигнал РК, подающийся на канал 6, преобразуется таким образом, что цепь аналогового параметра разрывается с частотой 1 Гц и обеспечивается запись импульсов 6,3 В, длительностью 0,5 с.
РК по каналу 1 представляет собой импульсный сигнал 27 В длительностью 0,1÷0,3 с, следующий с частотой 2÷4 Гц и преобразуется с помощью схемы «Формирователя маркера». Сигнал РК при этом записывается в виде импульсов 6,3 В длительностью 0,5 с, следующих с частотой 1 Гц.
Конструктивно РЩ-1 выполнен в виде коробки, с наружной стороны которой установлены разъёмы 1÷12, разъём питания 6,3 В («БП-7»), разъем входа сигналов РК уровня 6,3 В («РК»), разъёмы «КУ», «ЛПМ»,
«Шасси».
У основания коробки имеются лапки с отверстиями для крепления на летательном аппарате. Внешний вид РЩ-1 приведён на (рис. 22).
Рис. 20. Распределительный щиток РЩ.
1—штепсельные разъёмн Ш26...Ш31 для подключения датчиков и разовых команд каналов 7...12; 2—штепсельные разъёмы Ш20...Ш25 для подключения датчиков и разовых команд каналов 1...6; 3—штепсельный разъём ШЗ2 для подключения блока питания БП-7; 4—кнопка «Кн» «ИМИТАТОР ШАССИ»; 5—коробка.
Рис. 21. Схема электрическая принципиальная распределительного щитка РЩ.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме распределительного щитка РЩ.)
П р и м е ч а н и е: Резисторы со знаком «*» подбираются при настройке.
Принципиальные электрические схемы распределительного щитка РЩ-1 приведены на (рис. 22а, б, в, г).
6.6. Фильтр радиопомех
ФРП (рис. 23) предназначен для защиты бортсети летательного аппарата от радиопомех, создаваемых системой МСРП-12-96(-1).
Фильтр собран по Г-образной схеме (рис. 24) и состоит из дросселя Др, проходных конденсаторов С1 и С2, включенных параллельно, и конденсатора СЗ.
На вертикальной плате крепятся конденсаторы, на верхней стенке кожуха размещён дроссель. Плата и дроссель крепятся к кожуху винтами.
На боковых стенках кожуха расположены штепсельные разъёмы для подключения ФРП к бортсети и СБ-1.
На основании ФРП имеются лапки с отверстиями для крепления на летательном аппарате.
Рис. 22. Распределительный щиток РЩ-1.
1—Разъём «КУ» для подключения измерительных каналов КУ; 2—Разъём «РК» для подключения 13...24 РК по уровню 6 В; 3—Разъёмы для подключения датчиков и РК по уровню 0 В каналов Т...6; 4—Разъёмы для подключения датчиков и РК по уровню 0 В 7...12 каналов; 5—Разъём «БП-7» для подключения Б-7; 6—Коробка; 7—Кнопка «Кн» «ИМИТАТОР ШАССИ»; 8—Разъёмы «ЛПМ» «ШАССИ».
Рис. 22а. Принципиальная электрическая схема распределительного щитка РЩ-1.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме распределительного щитка РЩ-1)
Рис. 22б. Принципиальная электрическая схема коммутатора 6Л6.617.025 распределительного щитка РЩ-1.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме коммутатора 6Л6.617.025 распределительного щитка РЩ-1)
П р и м е ч а н и е: Резисторы со знаком «*» подбираются при настройке.
Рис. 22в. Принципиальная электрическая схема коммутатора 6Л6.617.024 распределительного щитка РЩ-1.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме коммутатора 6Л6.617.024 распределительного щитка РЩ-1)
П р и м е ч а н и е: Резисторы со знаком «*» подбираются при настройке.
Рис. 22г. Принципиальная электрическая схема формирователя маркера распределительного щитка РЩ-1.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме формирователя маркера распределительного щитка РЩ-1)
Рис. 23 Фильтр радиопомех ФРП.
1—кожух; 2—основание с отверстиями для крепления; 3—винты крепления кожуха к основанию.
Рис. 24 Принципиальная электрическая схема фильтра радиопомех ФРП.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ (к электрической принципиальной схеме фильтра радиопомех ФРП)
Рис.25. Схема электрических соединений МСРП-12-96(-1).
Рис.26. Схема габаритно-монтажная система МСРП-12-96(-1).
П р и м е ч а н и е:
- Разводку проводов (БПВЛЭ 0,35мм2) согласующих устройств (СУ) производить в соответствии с электрическими схемами СУ и распределительного щитка.
- Сигнал от датчика разовых команд к соответствующему каналу распределительного щитка вести проводом БПВЛЭ 0,5 мм2.
- Провода и кабели, соединяющие датчики С РЩ(-1), на схеме не показаны.
7. РАЗМЕЩЕНИЕ БЛОКОВ СИСТЕМЫ МСРП-12-96(-1) НА ЛЕТАТЕЛЬНОМ АППАРАТЕ
7.1. Схема электрических соединений и габаритно-монтажная схема системы МСРП-12-96-(-1)
На (рис. 25 и 26) представлены схема электрических соединений и .габаритно-монтажная схема системы МСРП-12-96(-1).
Сечения проводов в кабеле между отдельными блоками, входящими в систему, указаны при длине кабеля не более 25 м. При большей длине кабеля следует пересчитывать сечения соответствующих проводов.
Выборку канала РЩ(-1) для подключения датчиков и согласующих устройств рекомендуется производить в зависимости от важности регистрируемых параметров по возрастающим номерам.
ПРИМЕЧАНИЕ:
- Блоки, входящие в комплект системы МСРП-12-96, полностью взаимозаменяемы (за исключением замены РЩ-1 на РШ).
- При необходимости взаимной замены блоков системы МСРП-12-96 с блоками выпускавшейся ранее системы МСРП-12 допускается только одновременная замена ЛПМ и КУ.
- Замена РЩ на РЩ-1 предусматривает возможность увеличения габарита по высоте до 140 мм.
7.2. Рекомендации по эксплуатации и размещению на летательном аппарате блоков системы МСРП-12-96(-1)
1. Включение и выключение системы МСРП-12-96(-1) осуществлять от ССА 0,7÷2,2 и при скорости 70—100 км/ч.
2. ЛПМ в защитном контейнере устанавливать в хвостовой части фюзеляжа, в месте, удобном для технического обслуживания.
3. ЛПМ при эксплуатации в контейнере с монтажным основанием устанавливать следующим образом:
— закрепить в месте установки ЛПМ на съёмное основание;
— установить направляющие стойки монтажного основания в фигурные отверстия основания контейнера ЛПМ и повернуть контейнер по часовой стрелке до фиксации;
— завернуть стопорный винт замка.
4. Охлаждение ЛПМ осуществлять подачей в контейнер воздуха с температурой не выше +25°С и давлением до 0,5 ат.
5. Контрольную лампу установить в месте, удобном для эксплуатации и проверки ЛПМ.
6. Датчики давления устанавливать в непосредственной близости от приёмников давления.
7. Датчики перегрузок устанавливать в центре тяжести летательного аппарата или в непосредственной близости от него и крепить на жёстком кронштейне.
8. Датчики угловых перемещений крепить на органах управления летательного аппарата или в непосредственной близости от них.
8. КОНТРОЛЬНО-ПОВЕРОЧНАЯ УСТАНОВКА УП-МСРП
8.1. Краткое техническое описание
8.1.1. Н а з н а ч е н и е
УП-МСРП (рис. 27) предназначена для проверки системы МСРП-12-96 в лабораторных условиях, на летательном аппарате, при проведении регламентных работ, а также при отказах системы в процессе эксплуатации.
8.1.2. О с н о в н ы е т е х н и ч е с к и е д а н н ы е
Погрешность измерения временных промежутков между канальными импульсами системы МСРП-12-96 — не более 10 мкс.
Число разрядов десятичной индикации — 3.
Число одновременно проверяемых каналов — 1.
Последовательность выборки каналов — любая.
Рис. 27. Контрольно-поверочная установка УП-МСРП (лицевая панель).
1—цифровые лампы (Л4...Л6); 2—переключатель имитатора датчиков; 3—сигнализатор имитатора часов; 4—сигнализатор имитатора датчиков; 5—тумблер включения имитатора датчиков; 6—тумблер включения имитатора часов; 7—фонарь контроля обогрева; 8—штепсельный разъём Ш4 для подключения, кабеля к КУ; 9—штепсельный разъём №3 для подключения кабеля к СБ-1; 10—предохранитель Пр1 блока питания; 11—переключатель включения установки; 12—предохранитель пр2 электронагревательного элемента; 13—штепсельный разъём Ш2 для подключения кабеля к «СЕТЬ 27 В»; 14—штепсельный разъём Ш1 для подключения кабеля к КУ; 15—контрольные гнёзда Г1, Г2, Г3, Г4; 16—«гнездо ЗЕМЛЯ»; 17—переключатели выбора номера канала.
Рис. 28. Схема контрольно-поверочной установки УП-МСРП.
Рис. 29. Серия импульсов на входе контрольно-поверочной установки УП-МСРП.
Напряжение питания 27 В 10% постоянного тока.
Потребляемая мощность:
без обогрева — не более 30 Вт;
с включенным обогревом —не более 300 Вт.
Установка предназначена для эксплуатации в следующих условиях:
относительная влажность при температуре +35 °С — до 96%;
атмосферное давление — 460 мм. рт. ст.
8.1.3. Структурная схема
Структурная схема установки представлена на (рис. 28).
Принцип действия УП-МСРП заключается в измерении длительности временного промежутка (канального расстояния tк.р.) каждого канала системы МСРП-12-96 в десятичной системе счисления и визуальном представлении результата измерения на цифровых индикаторах.
От системы МСРП-12-96 на вход установки подаются серии канальных импульсов, кадровый импульс (рис. 29).
tи1... tиn — канальные временные промежутки системы МСРП-12-96, длительность которых зависит от напряжений, поступающих от датчиков и ЭОВ.
УП-МСРП состоит из следующих основных схем:
— входного каскада, обеспечивающего. ограничение входных сигналов;
— схемы выборки каналов, состоящей из четырёхразрядного двоичного счётчика и диодной матрицы;
— кварцевого генератора; вырабатывающего импульсы, следующие с частотой 100 кГц;
— трёхразрядного двоично-десятичного счётчика;
— диодных матриц и схем индикации десятичных разрядов и цифровых индикаторов типа ИН-1;
— ячейки, состоящей из двух схем формирования импульсов сброса;
— блока питания, имитатора напряжения датчиков и электрочасов.
Установка работает следующим образом.
Серия канальных импульсов с МСРП-12-96 подаётся на входной каскад установки.
Входной каскад производит ограничение сигналов, после чего серия импульсов подаётся на схему выборки каналов.
На схему сброса 1 (см. рис. 28) подаётся кадровый импульс от генератора кадровых импульсов МСРП-12-96.
Схема сброса 1 формирует импульс сброса, который служит для установления четырёхразрядного двоичного счётчика схемы выборки каналов в исходное состояние.
Четырёхразрядный двоичный счётчик схемы выборки каналов состоит из четырёх последовательно соединенных триггеров с двумя устойчивыми состояниями равновесия. Четырёхразрядный двоичный счётчик производит счёт серии импульсов в двоичной системе счисления. На временных диаграммах (рис. 30) представлены состояния триггеров двоичного счётчика при последовательном поступлении на его вход импульсов.
Счётчик соединен с диодной матрицей схемы выборки каналов. С разных выходов диодной матрицы снимаются импульсы, соответствующие канальным промежуткам. Выходы диодной матрицы соединены с переключателем НОМЕР КАНАЛА, которым выбирается импульс измеряемого канала и импульс предыдущего канала.
Импульс измеряемого канала запускает ключевой каскад схемы усилителя и генератора импульсов, который вырабатывает импульсы стабилизированной частоты 100 кГц.
Число импульсов зависит от длительности запускающего сигнала. Эти импульсы подаются на трёхразрядный двоично-десятичный счётчик, который производит счёт импульсов. С помощью диодных матриц, схем индикации и цифровых индикаторов просчитанное количество импульсов наблюдается визуально в десятичной системе счисления. Число, показываемое цифровыми индикаторами, представляет длительность измеряемого канала в десятках микросекунд.
Временные диаграммы работы одной декады двоично-десятичного счётчика представлены на (рис. 31).
П р и м е ч а н и е: Полное техническое описание и инструкция по эксплуатации приведены в эксплуатационной документации на УП-МСРП.
Рис. 30. Временные диаграммы работы схемы выборки каналов контрольно-поверочной установки УП-МСРП.
Рис. 31. Временные диаграммы работы двоично-десятичного счётчика.
Рис. 32. Декодирующее устройство ДУМС.
1—лентопртяжный механизм; 2—преобразующее устройство; 3—магнитоэлектрический осциллограф К12-22; 4—выпрямитель; 5—пульт управления магнитоэлектрическим осциллографом К12-22.
9. ДЕКОДИРУЮЩЕЕ УСТРОЙСТВО ДУМС К СИСТЕМЕ МСРП-12-96(-1)-С2
9.1. Краткое техническое описание
9.1.1. Н а з н а ч е н и е
ДУМС (рис. 32) предназначено для воспроизведения с магнитной ленты кодированных сигналов датчиков, записанных системой МСРП-12-96(-1), декодирования их и записи на фотобумагу с помощью магнитоэлектрического осциллографа.
9.1.2. О с н о в н ы е т е х н и ч е с к и е д а н н ы е
1. ДУМС обеспечивает одновременную запись на фотобумагу параметров четырёх любых каналов из двенадцати в любой их последовательности.
2. Одновременно с записью измеряемых параметров производится запись отметки времени на фотобумагу с интервалом 1 с.
3. Погрешность записи и воспроизведения напряжений датчиков системы МСРП-12-96 не выходит за пределы ±3% при работе совместно с магнитным самописцем.
4. Мощность, потребляемая ДУМС при напряжении 127 или 220 В частотой 50 Гц — не более 800 В А.
5. ДУМС имеет имитатор входных сигналов, что позволяет производить настройку прибора и подготовку его к работе без воспроизведения сигналов с магнитной ленты.
6. ДУМС работает в следующих условиях:
— температура окружающей среды +5÷+40°С;
— относительная влажность воздуха — до 95% при температуре +30 °С.
7. Питание ДУМС осуществляется от сети 2~750 Гц, 127/220 В ±10% или сети 2—27 В ±10% и сети 2~50 Гц 127/220 В +10%.
8. Время непрерывной работы не более 4 ч.
9.1.3. С т р у к т у р н а я и ф у н к ц и о н а л ь н а я с х е м ы
Структурная и функциональная схемы ДУМС представлены на (рис. 33, 34).
Принцип действия ДУМС основан на воспроизведении с магнитной ленты системы импульсов, ранее записанной системой МСРП-12-96, распределении импульсов по соответствующим каналам, преобразовании время-импульсной модуляции в широтно-импульсную, получении напряжений, пропорциональных длительностям широтно-модулированных сигналов (амплитудно-импульсная модуляция) с последующей записью их на фотобумагу с помощью магнитоэлектрического осциллографа К12-22.
На (рис. 35) представлены временные диаграммы, поясняющие работу ДУМС.
Серии импульсов, записанные на магнитную ленту системой МСРП-12-96, воспроизводятся магнитными головками ЛПМ ДУМС, усиливаются, ограничиваются, и на входе усилителя-ограничителя получается система импульсов (см. рис. 35, а), которая поступает в ячейку формирования.
Сформированная система импульсов (см. рис. 35, б, в) поступает на вход генератора кадрового импульса и в блок распределения. Кадровый импульс вырабатывается во время паузы между кадрами (см. рис. 35, г) и используется для установки триггерных ячеек блока распределения в исходное положение, а также для формирования импульса
сброса первого канала в блоке записи (см. рис. 35, и).
В блоке распределения происходит преобразование время-импульсной модуляции в широтно-импульсную и распределение импульсов по соответствующим каналам. На выходе блока распределения получается система импульсов, модулированных по длительности (см. рис. 35, к, л), которая поступает в блок записи.
В блоке записи система импульсов инвертируется (см. рис. 35, м. н), и широтно-импульсная модуляция преобразуется в амплитудную.
Амплитудно-модулированные — импульсы подаются на вход усилителя постоянного тока и записываются на фотобумагу с помощью К12-22 (рис. 35, о).
Сигналы отметок времени поступают на осциллограф из канала отметок времени.
П р и м е ч а н и е: Полное техническое описание и инструкция по эксплуатации приведены в эксплуатационной документации на ДУМС.
Рис. 33. Схема структурная декодирующего устройства ДУМС.
Рис. 34. Схема функциональная декодирующего устройства ДУМС.
П р и м е ч а н и е: Выпрямитель ДУМС поставляется только по особому требованию Покупателя.
Рис. 35. Временные диаграммы работы декодирующего устройства ДУМС.
10. УСТРОЙСТВО ДЕКОДИРОВАНИЯ УД-8-ДУМС
10.1. Назначение УД-8-ДУМС
УД-8-ДУМС совместно с преобразующим устройством и лентопротяжным механизмом ДУМС предназначено для одновременной экспресс обработки всей параметрической информации, регистрируемой системой МСРП-12 или МСРП-12-96, записи измеряемых параметров и секундных отметок времени на фотобумагу с помощью осциллографа с ультрафиолетовой записью типа «Нева-МТ».
10.2. Основные технические данные
10.2.1. УД-8-ДУМС совместно с преобразующим устройством и лентопротяжным механизмом ДУМС обеспечивает декодирование и запись на фотобумагу с помощью осциллографа «Нева-МТ» информации, записанной системой МСРП-12 или МСРП-12-96, одновременно по 12-ти каналам.
10.2.2. Суммарная погрешность регистрации информации системой МСРПИ-12 или МСРП-12-96 и воспроизведения ее преобразующим устройством и лентопротяжным механизмом ДУМС совместно с УД-8-ДУМС
не превышает ±3% (без учета погрешности датчиков и согласующих устройств).
10.2.3. Питание блоков УД-8-ДУМС осуществляется от сети переменного тока 127 В или 220 В ±10% 50 Гц (осциллограф «Нева-МТ» — лишь от сети 220 В ±10% 50 Гц).
10.2.4. Мощность, потребляемая УД-8-ДУМС, не превышает 1000 В А.
10.2.5. УД-8-ДУМС работает в условиях:
а) температура окружающей среды в пределах от +5 °С до +40 °С;
б) относительной влажности воздуха до 95% при температуре +-30 °С.
10.2.6. Время непрерывной работы УД-8-ДУМС не более 4-х часов. После этого УД-8-ДУМС выключить и выдержать в выключенном состоянии не менее 2-х часов.
10.2.7. Масса УД-8-ДУМС не более 90 кг.
10.3. Состав УД-8-ДУМС
Внешний вид УД-8-ДУМС приведён на (рис. 36).
10.4. Принцип работы УД-8-ДУМС
10.4.1. Принцип действия УД-8-ДУМС основан на получении напряжений, пропорциональных длительности широтно-модулированных сигналов, поступающих с блока распределения ДУМС (амплитудно-импульсная модуляция) с последующей записью на фотобумагу.
Состав аппаратуры при декодировании 12 каналов и соединение ее блоков показаны на структурной схеме (рис. 37).
Серии импульсов, ранее записанных на магнитную ленту системой МСРП-12-96 и воспроизведенные магнитными головками ЛПМ ДУМС, поступают на преобразующее устройство ДУМС, где распределяются на 4 блока записи преобразующего устройства ДУМС и 8 блоков записи блока УД-8 (см.рис. 38).
С выходов блоков записи ДУМС и УД-8 амплитудно-модулированные импульсы поступают на вход осциллографа «Нева-МТ».
10.4.2. Описание работы УД-8-ДУМС по функциональной схеме. Функциональная
схема преобразующего устройства и лентопротяжного механизма декодирующего устройства ДУМС и устройства декодирования УД-8-ДУМС показаны на (рис. 38).
С выходов блока распределение ДУМС система импульсов, модулированных по длительности поступает в блоки записи блока УД-8.
В блоке записи система импульсов инвертируется и широтно-импульсная модуляция преобразуется в амплитудную. Амплитудно-модулированные импульсы подаются на вход усилителя постоянного тока и записываются на фотобумагу с помощью осциллографа «Нева-МТ».
П р и м е ч а н и е: Полное техническое описание и инструкция по эксплуатации приведены в эксплуатационной документации на УД-8-ДУМС.
Рис. 36. Устройство декодирования УД-8 ДУМС.
Рис. 37. Схема структурная устройства декодирования ДУМС с блоком УД-8.
Рис. 38. Схема функциональная устройства декодирования ДУМС с блоком УД-8.
11. УСТАНОВКА УПЛ-01 ДЛЯ ПЕРЕМОТКИ МАГНИТНОЙ ЛЕНТЫ
11.1. Краткое техническое описание
11.1.1. Н а з н а ч е н и е
Установка УПЛ-01 (рис. 39) предназначена для перемотки магнитной ленты со стандартных бобин предприятия-изготовителя магнитной ленты и с магнитофонных кассет на кассеты ЛПМ систем МСРП-12-96 и ДУМС, а также с кассеты на кассету этих же ЛПМ в наземных условиях.
11.1.2. О с н о в н ы е т е х н и ч е с к и е д а н н ы е
- Ширина магнитной ленты, мм 6,25 (19,05; 25,4).
- Время перемотки ленты на кассету, вместимостью 250, м мин 2,5±0,5.
- Погрешность счётчика, м ±5.
- Температурный интервал работы, °С от +5 до +-40.
- Напряжение питания 2~50 Гц, 220 В ±10%
Установка может производить непрерывную намотку магнитной ленты 10 кассет.
11.1.3. П р и н ц и п и а л ь н а я э л е к т р и ч е с к а я с х е м а
УПЛ-01 (рис. 40) состоит из электродвигателя М, силового трансформатора Тр, выпрямителя 27 В (диоды Д1—Д4), реле Р1, Р2 и электромагнита ЭМ.
При замыкании контактов выключателя В4 напряжение сети 2 50 Гц, 220 В подаётся на нормально разомкнутые контакты реле и трансформатор Тр. Выпрямленное напряжение —27 В поступает на нормально разомкнутые контакты микровыключателей МВ2 и МВЗ.
При нажатии кнопки Кн2 замыкаются контакты микровыключателя МВ2, включается реле Р1, и через контакты К1Р1, К2Р1 и КЗР1 напряжение питания поступает на двигатель.
При нажатии кнопки Кн3 замыкаются контакты микровыключателя МВЗ, включается реле Р2, и через контакты К1Р2, К2Р2 и КЗР2 напряжение питания поступает на двигатель. Направление вращения двигателя определяется замыканием контактов К1Р1 и К2Р1 или К1Р2 и К2Р2. При нажатии кнопки Кн2 приёмная кассета вращается по часовой стрелке. При нажатии кнопки Кн3 приёмная кассета вращается против часовой стрелки в соответствии со
стрелкой, выгравированной на клавише кнопочного устройства.
Остановка двигателя осуществляется нажатием кнопки Кн1 (СТОП).
При нажатии кнопки Кн1 размыкаются контакты механически связанного с ней микровыключателя МВ2 или МВЗ, обесточивается соответствующее реле (Р1 или Р2), и двигатель отключается от сети. Кроме того, отключается электромагнит ЭМ и срабатывает тормозное устройство электродвигателя.
Индикацию включенного состояния установки осуществляет лампа накаливания ЛН в цепи вторичной обмотки трансформатора. Для обеспечения номинального тока через лампу накаливания ЛН введён резистор R2.
П р и м е ч а н и е: Полное техническое описание и инструкция по эксплуатации приведены в эксплуатационной документации на УПЛ-01.
Рис. 39. Установка перемотки ленты УПЛ-01
1—кассета; 2—верхний подкассетник; 3—гайка кассетного механизма; 4—жгут питания; 5—предохранитель; 6—лампа; 7—ключ специальный.
Рис. 40. Схема электрическая принципиальная установки для перемотки ленты УПЛ-01.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ
(к принципиальной электрической схеме, установки для перемотки ленты УПЛ-01).
ЧАСТЬ ⅠⅠ. ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ
МСРП-12-96(-1)-С2
12. УКАЗАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
При эксплуатации системы МСРП-12-96(-1) следует руководствоваться правилами электробезопасности при работе с напряжением от 4 до 250 В.
13. ПОДГОТОВКА СИСТЕМЫ МСРП-12-96(-1) К РАБОТЕ ПЕРЕД УСТАНОВКОЙ НА ЛЕТАТЕЛЬНЫЙ АППАРАТ (В ЛАБОРАТОРНЫХ УСЛОВИЯХ)
1. Произвести внешний осмотр блоков системы МСРП-12-96(-1) (КУ, ЛПМ, СБ-1, РЩ(-1), ФРП) БП-7, датчиков и согласующих устройств, входящих в комплект данного варианта системы. На внешних поверхностях блоков не должно быть механических повреждений, ухудшающих их качество.
Дальнейшую проверку датчиков, согласующих устройств и блока питания БП-7 производить в соответствии с документацией на них.
2. Проверить техническую документацию системы МСРП-12-96(-1).
3. Проверить работоспособность блоков системы МСРП-12-96(-1),
П р и м е ч а н и е: Если система МСРП-12-96 длительное время находилась в выключенном состоянии при температуре окружающей среды —30÷—60°С, для установления нормального режима работы блоков необходимо их прогреть, подав напряжение питания системы.
Время прогрева:
В нормальных условиях(Т°’>-5°С)—3—5мин; при температуре ниже—30°С—15мин;„ „—40°С—20мин;„ „—50°С—30мин;„ „—60°С—40мин.
1) Соединить блоки системы МСРП-12-96(-1) (без датчиков и согласующих устройств) с помощью лабораторных кабелей согласно схеме электрических соединений (см. рис. 25).
2) Проверить правильность подключения кабелей к разъемам блоков сверить номера на разъёмах кабелей и блоков.
3) Выключить тумблер на СБ-1.
4) Снять верхнюю полусферу с ЛПМ и проверить наличие кассет с магнитной лентой.
П р и м е ч а н и е: Применение в ЛПМ магнитной ленты с истёкшим сроком хранения не допускается.
5) Проверить правильность заправки ленты в рабочий тракт по схеме (см. рис. 15), показанной а пластинке, укрепленной на внутренней стороне верхней полусферы. Лента, заправленная в рабочий тракт, должна находиться в натянутом состоянии и не выходить за бортики направляющих роликов тракта.
Лента должна быть заправлена рабочим слоем к блоку головок. На нижней кассете рабочий слой ленты должен быть направлен внутрь, на верхней кассете рабочий слой ленты должен быть направлен наружу.
6) Установить переключатель АВТ. — ВЫКЛ. — НАМОТКА на ЛПМ в положение АВТ. Верхнюю полусферу не надевать.
7) Подать на разъём Ш6 СБ-1 напряжение 2—27 В. На штепсельный разъём ШАССИ РЩ-1 напряжение не подавать.
8) Включить тумблер на СБ-1. При этом должен начать работать ЛПМ.
9) Для проверки нормального движения ленты в тракте произвести кратковременное включение ЛПМ переключателем АВТ. — ВЫКЛ. — НАМОТКА 3—4 раза (на 10—15 с каждый раз). После каждого выключения проверить состояние ленты, а после каждого включения ЛПМ — движение ленты в тракте и сигнализацию движения ленты (по контрольной лампе). При нормальной работе ЛПМ контрольная лампа работает в режиме проблесковой сигнализации.
ВНИМАНИЕ!
1. НЕ ДОПУСКАЕТСЯ ВКЛЮЧЕНИЕ КОНТРОЛЬНОЙ ЛАМПЫ БЕЗ СБ-1 ИЛИ ГАСЯЩЕГО РЕЗИСТОРА (100 Ом) В ЦЕПИ КОНТРОЛЬНОЙ ЛАМПЫ, ТАК КАК ЭТО ПРИВОДИТ К ОТКАЗУ КОНТАКТОВ СИГНАЛИЗАЦИИ ЛЕНТЫ.
2. НЕ ДОПУСКАЕТСЯ ОТКЛЮЧЕНИЕ ПИТАНИЯ ЛПМ ПУТЁМ ОТСОЕДИНЕНИЯ РАЗЪЁМА Ш5 КОНТЕЙНЕРА, ТАК КАК ЭТО ПРИВОДИТ К ОСЛАБЛЕНИЮ И ВЫПАДЕНИЮ МАГНИТНОЙ ЛЕНТЫ ИЗ ТРАКТА И ЕЁ ОБРЫВУ ПРИ ПОСЛЕДУЮЩЕМ ВКЛЮЧЕНИИ ЛПМ.
10) Проверить исправность следящего щупа. Следящий щуп в исправном состоянии не должен задевать за нижнюю кассету при её вращении. Ролик следящего щупа должен легко вращаться и не оставлять на ленте царапин или других механических повреждений, легко отводиться в крайнее положение (за пределы кассеты), автоматически стопориться в этом положении и легко возвращаться в рабочее положение при нажатии кнопки в торце щупа.
11) Замерить время полного цикла перемотки ленты (с нижней кассеты на верхнюю и обратно); оно должно быть не менее 75 мин.
12) На ЛПМ переключатель АВТ.—ВЫКЛ. —НАМОТКА установить в положение ВЫКЛ. — ЛПМ должен перестать работать.
13) Установить верхнюю полусферу на ЛПМ и убедиться по контрольной лампе, что ЛПМ работает.
14) Снять верхнюю полусферу — ЛПМ должен перестать работать. Установить переключатель на ЛПМ в положение АВТ.
15) Подать напряжение на разъём ШАССИ РЩ-1 (+27 В на кл. 4; —27 В на кл. 1):
ЛПМ должен перестать работать.
16) Нажать кнопку ИМИТАТОР ШАССИ на РЩ(-1) — ЛПМ должен работать; отпустить кнопку — ЛПМ должен остановиться.
17) Снять напряжение с разъёма ШАССИ РЩ(-1) — ЛПМ должен начать работать.
П р и м е ч а н и е: Повторное после срабатывания автостопа включение ЛПМ осуществляется не ранее чем через 10 мин выключением, а затем включением питания ЛПМ с помощью кнопки ИМИТАТОР ШАССИ на РЩ(-1) или выключателя ПРОВЕРКА в самолётной схеме.
18) Выключить тумблеры на СБ-1 и ЛПМ.
19) Подключить к системе МСРП-12-96 установку УП-МСРП и проверить настройку кодирующих ячеек КУ.
Работу производят в следующей последовательности:
— Подключить УП-МСРП к сети 27 В с помощью кабеля Ш2— СЕТЬ 27 В.
— Включить УП-МСРП. При этом загорается лампа подсветки переключателя НОМЕР КАНАЛА, а на лампах цифровой индикации — произвольное число.
— Отключить кабель МСРП-12-96 от разъёма Ш1 ГОЛОВКА ЗАПИСИ КУ.
— Подключить кабель Ш1—КОД. УСТР. к разъёму Ш1 установки и к разъёму Ш1 ГОЛОВКА ЗАПИСИ КУ.
— Отключить кабель МСРП-12-96 от разъёма Ш2 ГОЛОВКА ЗАПИСИ КУ.
— Подключить кабель Ш4—КОД. УСТР. к разъёму Ш4 УП-МСРП и к разъёму Ш2 ДАТЧИКИ КУ.
— Отключить кабель МСРП-12-96 от разъёма Ш9 СБ-1.
— Подключить кабель Ш3—СОЕД. БЛОК к разъёму ШЗ установки и к разъёму Ш9 СБ-1.
— Включить питание системы МСРП-12-96 и тумблер на СБ-1 и через 5 мин произвести нижеуказанные работы.
— Включить имитатор датчиков УП-МСРП тумблером ДАТЧИКИ, при этом загорается контрольная лампа включения.
— Установить напряжение 0 В переключателем U ИМИТАТОРА ДАТЧИКОВ.
— Переключатель НОМЕР КАНАЛА выбрать первый канал.
— Произвести отсчёт длительности временного интервала первого канала, которая должна быть равна 1750 мкс. В случае несоответствия длительности интервала указанной выше регулировку производить потенциометром R59, расположенным на боковой стенке КУ.
П р и м е ч а н и е: Если первая цифра на цифровом индикаторе УП-МСРП будет нуль, а не единица, то длительность измеряемого временного интервала больше 2000 мкс и для установки длительности, равной 1750 мкс, необходимо ось потенциометра R59 повернуть против часовой стрелки до получения на цифровом индикаторе показаний 175 (1750 мкс).
— Произвести выборку последующих 2—12-го каналов и их настройку потенциометрами R60—R70.
— Произвести отсчёт длительности временного интервала 1-го канала при напряжении имитатора датчиков 6,3 В; для этого переключателем НОМЕР КАНАЛА выбрать 1-й канал.
Устанавливая переключатель U ИМИТАТОРА ДАТЧИКОВ последовательно в положения 0,6; 1,26; 1,89; 2,52; 3,15; 3,78; 4,41; 5,04; 5,67; 6,3, наблюдать за показаниями цифрового индикатора УП-МСРП. Показания должны увеличиваться от 175 (1750 мкс) ступенями примерно через 200 мкс до 199, а затем от 000 до 190 (3900 мкс) в положении переключателя 6,3 В.
В случае несоответствия длительности временного интервала указанной величине произвести регулировку потенциометром R77, расположенным на боковой стенке КУ.
П р и м е ч а н и е: Если первая цифра на цифровом индикаторе УП-МСРП будет не единица, а нуль, то это значит, что длительность временного интервала превышает 4000 мкс и ось потенциометра R77 необходимо повернуть против часовой стрелки до получения показаний 190 (3900 мкс).
— Произвести выборку последующих 2—12-го каналов и их настройку потенциометрами R78—R88.
При необходимости выполнения полной регулировки КУ следует:
— установить оси потенциометров R59—R70 и R77—R88 в крайнее положение против часовой стрелки;
— выбрать первый канал - плавно поворачивая ось потенциометра R59 по часовой стрелке, установить показание 175 цифрового индикатора УП-МСРП при положении переключателя U ИМИТАТОРА ДАТЧИКОВ на нуле;
— установить переключатель U ИМИТАТОРА ДАТЧИКОВ в положение 6,3 - плавно поворачивая ось потенциометра R77 по часовой стрелке, добиться увеличения показаний цифрового индикатора до 199, а затем от 000 до 190 (3900 мкс);
— аналогично выполнить регулировку 2—12-го каналов.
— При отсутствии сигнала времени произвести отсчет длительности временного интервала 13-го канала, которая должна быть 1750 мкс. В случае несоответствия длительности временного интервала указанной регулировку производить потенциометром R71, расположенным на боковой стенке КУ.
— При наличии сигнала времени длительность временного интервала должна быть равна 3900 мкс. В случае несоответствия длительности временного интервала указанной регулировку производить потенциометром R89.
— При правильной работе 13-го (часового) канала на цифровом индикаторе последовательно должны загораться цифры, соответствующие минимальной (1760 мкс) и максимальной (3900 мкс) длительности временных интервалов.
При необходимости регулировку длительностей временных интервалов 13-го канала выполнять следующим образом:
—- установить ось потенциометра R89 в крайнее положение против часовой стрелки;
— плавно поворачивая ось потенциометра R71 по часовой стрелке, установить показание 175 (1750 мкс) цифрового индикатора УП-МСРП;
— нажать кнопку t13 на лицевой панели КУ; плавно поворачивая ось потенциометра 889 по часовой стрелке, установить показания цифрового индикатора при наличии сигнала времени 190 (3900 мкс).
П р и м е ч а н и е:
1. Длительности импульсов измерительных и временного каналов выставлять следующим образом:
tмин=1750±100 мкс
tмакс=3900±100 мкс
2. В процессе эксплуатации допускается уход длительностей импульсов в измерительных и временном каналах в пределах
3. При наличии на указателе УП-МСРП мелькающих цифр или произвольной величины длительности импульса на нескольких каналах вывести потенциометры (R59—R71 и R77—R89) всех каналов против часовой стрелки до упора и затем по порядку, начиная с первого канала, плавным поворотом движков потенциометров по часовой стрелке установить заданные длительности. После этого еще раз проверить и при необходимости подрегулировать выставленные величины длительностей.
— Установить наличие калибровки по каналам 1—12. Для этого установить переключатель U ИМИТАТОРА ДАТЧИКОВ на УП-МСРП в положение 3,15 (среднее положение). Последовательно выбирая каналы 1—12 переключателем НОМЕР КАНАЛА, наблюдать изменение показаний цифрового индикатора скачками до 1750 мкс и затем до 3500—3900 мкс один раз в 60±20 с. В случае отсутствия калибровки произвести проверку калибровочного механизма СБ-1 системы МСРП-12-96 или заменить СБ-1.
П р и м е ч а н и е: Проверку и регулировку КУ можно производить с помощью импульсного осциллоскопа ИО-4 (или однотипного), подключаемого к соответствующим контрольным гнездам КУ.
20) Отсоединить от разъёма ГОЛОВКА ЗАПИСИ жгут Ш1—КУ (из комплекта установки УП-МСРП).
Соединить с помощью кабеля КУ и ЛПМ.
21) Устанавливая на УП-МСРП переключатель U ИМИТАТОРА ДАТЧИКОВ фиксированные напряжения от 0 до 6,3 В, записать их одновременно на все 12 каналов системы МСРП-12-96. Рекомендованная длительность записи одной ступеньки фиксированного напряжения 2—3 с.
Запись произвести на нижней и верхней дорожках магнитной ленты в течение 4—5 мин.
22) Снять кассету с контрольной записью с ЛПМ системы МСРП-12-96. Расшифровать контрольную запись на ДУМС (УД-8-ДУМС).
Дать заключение о качестве работы системы МСРП-12-96 (наличие на фотобумаге чёткой записи, отметок времени, калибровочных отметок).
П р и м е ч а н и е:
1. Тарировка измерительного тракта каждого канала системы не требуется.
2. Допускаются случайные сбои записи, не мешающие расшифровке записей параметров.
Перечень приборов и вспомогательной аппаратуры:
1. УП-МСРП
2. ДУМС (УД-8-ДУМС)
3. УПЛ-01
4. Импульсный осциллоскоп типа ИО-4 или другой однотипный.
14. ПОДГОТОВКА СИСТЕМЫ МСРП-12-96(-1) К РАБОТЕ ПОСЛЕ УСТАНОВКИ ЕЁ НА ЛЕТАТЕЛЬНЫЙ АППАРАТ
14.1. Проверка работоспособности у блоков системы
1. Проверить правильность монтажа блоков системы МСРП-12-96(-1) на летательном аппарате согласно схеме электрических соединений и габаритно-монтажной схеме.
2. Проверить правильность установки и подключения датчиков системы МСРП-12-96 согласно утверждённым монтажной и принципиальной схемам для данного летательного аппарата.
3. Снять верхнюю полусферу с ЛПМ.
П р и м е ч а н и е: При вскрытии контейнера в условиях пониженных температур с целью замены магнитной ленты узлы и детали ЛПМ могут покрыться инеем. В этом случае замена ленты возможна только после просушки ЛПМ. Несоблюдение этого указания приводит к отказу ЛПМ.
4. Подать на борт питание 27 В постоянного тока.
5. Включить систему МСРП-12-96 тумблером на СБ-1, при этом должно начать работать КУ.
П р и м е ч а н и е: При необходимости прогреть систему — (см. примечание к п. 3 разд. 13).
6. Произвести проверку полярности питания датчиков системы от блока питания БП-7, для чего:
— отсоединить разъём КУ от РЩ(-1);
— проверить наличие напряжения на гнёздах 13 и 14 розетки КУ («+» на гнезде 13 и «-» на гнезде 14);
— подсоединить разъем КУ и РЩ(-1).
7. Подключить к КУ установку УП-МСРП. С помощью УП-МСРП проверить величину временных промежутков кодирующих ячеек (см. п. 13, 3, 19).
8. Произвести последовательную выборку с 1-го по 12-й канал и, создавая физическое воздействие на соответствующие датчики, убедиться в наличии изменений показаний цифрового индикатора Ц УП-МСРП. Этим проверяется работоспособность датчиков и правильность распределения их по каналам.
9. Произвести выборку 13-го канала. В случае правильной работы ЭОВ один раз в секунду будут изменяться показания цифрового индикатора следующим образом:
1750 мкс — отсутствие сигнала времени;
3900 мкс — подача сигнала времени.
10. Установить наличие калибровки по каналам 1—12, для чего:
— установить переключателем U ИМИТАТОРА ДАТЧИКОВ на УН-МСРП в положение 3,15 (среднее положение);
— последовательно выбирая каналы 1—12 переключателем НОМЕР КАНАЛА, наблюдать за изменением показаний цифрового индикатора скачками до 1750 мкс и затем до 3500—3900 мкс один раз в 60-20 с.
11. Отключить УП-МСРП от КУ.
12. Включить ЛПМ тумблером в кабине пилотов (имитатором концевого выключателя шасси или ССА).
Проконтролировать работу ЛПМ по сигнальной лампе, расположенной в кабине пилотов. Лампа должна работать в режиме проблесковой сигнализации.
13. Проверить работоспособность системы МСРП-12-96 от аварийного источника питания, для чего:
— выключить основной АЗС питания системы МСРП-12-96;
— проверить работу системы от источника аварийного питания.
П р и м е ч а н и е: Проверку от источника аварийного питания рекомендуется производить не более 1,5—2 мин.
14. Произвести контрольную запись на системе МСРП-12-96 в течение 2—3 мин по обеим дорожкам.
15. Выключить систему МСРП-12-96.
16. Извлечь из ЛПМ кассету с контрольной записью и расшифровать её на ДУМС (УД-8-ДУМС). Дать заключение о качестве работы системы МСРП-12-96 (наличие на фотобумаге чёткой записи, отметок времени, калибровочных отметок).
17. После проведенных проверок необходимо заправить ЛПМ магнитной лентой, переключатель АВТ.—ВЫКЛ.—НАМОТКА установить в положение АВТ., установить на место верхнюю полусферу контейнера ЛПМ.
14.2. Проверка работоспособности блоков системы после полёта
- Снять полусферу с ЛПМ.
- Извлечь кассету с записью из ЛПМ.
- Расшифровать запись, с помощью ДУМС и тарировочных графиков.
Погрешность записи не превышает
где δ∑ — суммарная погрешность записи регистрируемого параметра;
δмсрп — суммарная погрешность записи и воспроизведения напряжения датчика или согласующего устройства системы МСРП-12-96;
δд — погрешность датчика или согласующего устройства.
15. РАСШИФРОВКА ЗАПИСИ
15.1. Расшифровка записи от потенциометрических датчиков
Полученные на фотобумаге записи, пример которых приведён на (рис. 41, 42, 43), расшифровываются следующим образом:
1. Совместить ось абсцисс масштабной линейкой с калибровочными отметками расшифровываемого канала записи, которые соответствуют нулю напряжения датчика (в точках, соответствующих нулю напряжения датчиков, предназначенных для измерения параметров одного знака линии записи параметров должны совпадать с калибровочными отметками расшифровываемого канала записи).
2. Определить ординату калибровочной отметки, соответствующей максимальному размаху записи данного канала 1макс (максимальное напряжение датчика).
П р и м е ч а н и е: При наличии наклона записи калибровочных напряжений ординату калибровочной отметки следует определить по верхнему уровню (в точках максимального размаха).
3. Измерить ординаты выбранных точек записи 1.
Рис. 41. Пример записи регистрируемых параметров на фотобумаге после декодирования (разовые команды РК регистрируются с помощью распределительного щитка РЩ).
Рис. 42. Пример записи разовых команд РК распределительным щитком РЩ-1 на фотобумаге после декодирования.
Рис. 43. Пример записи на фотобумаге одного канала от имитатора датчиков контрольно-поверочной установки УП-МСРП после декодирования.
5. Определить искомое значение измеряемого параметра по тарировочной таблице или тарировочному графику датчика, приведённым в паспорте на него или в его техническом описании:
где Р — значение параметра;
rизм — текущее значение сопротивления потенциометрического датчика;
Rполн — полное сопротивление потенциометрического датчика;
U — текущее значение напряжения датчика;
Uмакс — величина напряжения питания датчика.
В процессе записи могут иметь место утолщения или размывы линий, возникающие из-за пульсаций измеряемых величин и воздействия на датчики вибрационных перегрузок. Так, при воздействии на датчик МП-95 вибраций в диапазоне частот от 5 до 300 Гц, амплитудой до 1 мм и ускорениях до 5 ед. размыв выходного сигнала может достигать 15% от величины измеряемого диапазона. Отсчёт измеряемой величины в этом случае должен производиться по усредненным показаниям.
15.2. Расшифровка записи от непотенциометрических датчиков
1. Расшифровать записи по (пп. 1—4 подразд. 15.1).
2. Определить текущее значение напряжения датчика U, соответствующее отношению:
U=Uмакc·х,
где Uмакc — величина стабилизированного напряжения, выдаваемая БП-7 и указанная в паспорте на него.
3. Определить искомое значение измеряемого параметра Р по тарировочному графику датчика
Р=f(U)
или по тарировочной таблице.
П р и м е ч а н и е: Прерывистая запись на фотобумаге свидетельствует о наличии разовой команды по расшифровываемому каналу (см. рис. 41, 42).
15.3. Расшифровка записи от имитатора датчиков поверочной установки УП-МСРП
1. Совместить ось абcцисс масштабной линейки с калибровочными отметками расшифровываемого канала записи, которые соответствуют нулю напряжения датчиков.
2. Определить ординату максимального размаха записи данного канала 1макс (рис. 43), соответствующую максимальному напряжению имитатора датчиков (6,3 В).
3. Выполнить операции по (пп. 3—5 подразд. 15.1).
П р и м е ч а н и е: Контрольную запись от имитатора датчиков УП-МСРИ выполнить таким образом, чтобы нулевые и максимальные значения (6,3 В) напряжения повторялись не менее двух раз.
16. РЕГЛАМЕНТНЫЕ РАБОТЫ
16.1. Инструмент и приспособления
При проведении регламентных работ используются следующие приспособления и
инструменты:
— стойки для установки платы ЛПМ;
— приспособления для монтажа и демонтажа шлангов обдува ЛПМ;
— медицинский шприц вместимостью 5—10 смз;
— монтажный пинцет;
— отвертка.
П р и м е ч а н и е: Перед проведением регламентных работ вскрыть пломбы предприятия-изготовителя. После выполнения регламентных работ блоки системы пломбируются эксплуатирующими организациями.
16.2. Перечень регламентных работ
Регламентные работы системы МСРИ-12-96 производить в соответствии с перечнем, приведённым в (табл. 3).
16.3. Операции, предшествующие регламентных работ
Перед выполнением регламентных работ необходимо:
— снять магнитную ленту с ЛПМ;
— произвести декодирование на ДУМС (УД-8-ДУМС) и расшифровку записи параметров последнего полёта с проверкой наличия и качества записи по всем 12 измерительным каналам и каналу регистрации отметок времени.
П р и м е ч а н и е:
1. Запись на фотобумагу производить в течение 2—3 мин. с обеих дорожек магнитной ленты в начале, середине и конце рулона магнитной ленты. Наличие и качество остальной записи оценить визуально с помощью катодного осциллографа, подключенного к преобразующему устройству ДУМС.
2. Запись на фотобумаге должна быть чёткой, не иметь сбоев или размыва, препятствующих её расшифровке.
Перечень регламентных работ
Таблица 3
П р и м е ч а н и е:
- Допускается периодичность регламента — 250 часов.
- * — периодичность уточняйте в пункте методики.
16.4. РЕГЛАМЕНТНЫЕ РАБОТЫ ПО ЛПМ
16.4.1. П о д г о т о в и т е л ь н ы е о п е р а ц и и
Для проведения регламентных работ необходимо вынуть ЛПМ из контейнера, для чего следует выполнить следующие операции:
1. Открыть замок контейнера, вращая на себя болт 5 (см. рис. 8) ключом 10, укрепленным на основании контейнера.
2. Снять верхнюю полусферу 2 контейнера,
3. Перемотать ленту на верхнюю кассету.
4. Снять кассеты с магнитной лентой, для чего:
— отвести следящий щуп 2 (см. рис. 12);
— ослабить четыре винта 10 специальным ключом из ЗИП;
— отворачивать винты 10 до упора не допускается;
— снять верхнюю кассету;
— выбрать магнитную ленту из рабочего тракта;
— снять нижнюю кассету.
5. Отвернуть шесть винтов, крепящих ЛПМ к нижней полусфере контейнера, и вынуть их.
6. Приподнять ЛПМ со стороны магнитных головок (см. рис. 9) и вставить между нижней полусферой и платой ЛПМ две колонки 6, взятые из ЗИП.
7. Снять резиновые шланги 7 со штуцеров обдува.
8. Отключить вилку 8 штепсельного разъёма.
9. Вынуть ЛПМ из нижней полусферы контейнера.
10. Укрепить три колонки, необходимые для проведения регламентных работ, на основной плате (см. рис. 12).
16.4.2. П р о в е р к а с о с т о я н и я п а с с и к о в
Проверку состояния пассика привода и пассика 14 (см. рис. 13) электромагнитных муфт производить визуально по всей длине. На пассиках не должно быть надрезов и других механических повреждений.
Для замены пассиков и дальнейшего проведения работ необходимо:
— снять пассик привода;
— отвинтить три гайки крепления платы привода;
— снять верхние ограничительные шайбы амортизаторов платы привода и пассик 14 электромагнитных муфт со шкива редуктора;
— снять со стоек 1 плату 15 привода;
— снять пассик 14 с электромагнитных муфт.
П р и м е ч а н и е: Пассики подлежат замене через 600 ч наработки или при обнаружении надрезов и механических повреждений.
16.4.3. С м а з к а в е р х н е г о п о д ш и п н и к а т о н в а л а
1. Набрать в медицинский шприц примерно 0,25 смз масла марки ОКВ-122-16.
2. Ввести иглу шприца в зазор между тонвалом (ведущим валом) 5 (см. рис. 12) и отверстием платы и пустить две-три капли масла.
3. Для прохода масла в подшипник провернуть рукой маховик 6.
4. При попадании масла на поверхность маховика необходимо его удалить бязевым тампоном, слегка смоченным спиртом.
16.4.4. П р о м ы в к а п р и ж и м н ы х и н а п р а в л я ю щ и х р о л и к о в и р а б о ч е й п о в е р х н о с т и м а г н и т н ы х г о л о в о к и к о н т а к т о в а в т о с т о п а
1. Протереть направляющие ролики 8 (см. рис. 12) и прижимные ролики 14 бязевым тампоном, слегка смоченным хлористым метиленом.
2. Протереть рабочие поверхности магнитных головок бязевым тампоном, слегка смоченным хлористым метиленом.
3. Протереть бязевым тампоном, слегка смоченным хлористым метиленом, подвижный и неподвижные контакты автостопа. На контактах не должно быть следов ферромагнитного слоя ленты.
П р и м е ч а н и е:
1. Рабочие поверхности прижимных и направляющих роликов, магнитных головок не должны иметь следов ферромагнитного слоя.
2. Не допускается разборка и регулировка прижимных и направляющих роликов, блока магнитных головок.
16.4.5. П р о м ы в к а т о к о п р о в о д я щ и х к о н т а к т о в э л е к т р о м а г н и т н ы х м у ф т
1. Отвернуть винты и снять крышки 16 (см. рис. 13), закрывающие токопроводящие контакты электромагнитных муфт.
2. Промыть контакты 17 бензином с двух сторон с помощью мягкой кисти (см. ЗИП, кисть № 16), вращая рукой подкассетники. Не допускать попадания бензина в подшипники муфт.
3. Надеть крышки 16, завернуть винты,
16.4.6. С м а з к а н и ж н е г о р а д и а л ь н о - у п о р н о г о п о д ш и п н и к а т о н в а л а
1. Набрать в шприц примерно 0,25 см3 масла марки ОКБ-122-7-5.
2. Ввести иглу шприца через отверстие шкива (см. рис. 13) в нижний радиально-упорный подшипник оси тонвала и пустить две-три капли масла.
3. При попадании масла в желоб шкива необходимо удалить масло бязевым тампоном, слегка смоченным бензином.
16.4.1. П р о д у в к а и п р о м ы в к а к о л л е к т о р а э л е к т р о д в и г а т е л я, з а м е р в ы с о т ы щ ё т о к, з а м е н а щ ё т о к
1. Снять плату привода.
2. Отвинтить три винта, крепящие редуктор к плате привода.
3. Отсоединить шланг от штуцера стакана 8, отвинтить три винта крепления стакана и снять стакан с двигателя (см. рис. 17).
4. Отогнуть пинцетом и застопорить пружины 4 (см. рис. 17), удерживающие щётки 2.
П р и м е ч а н и е: Для облегчения доступа к щёткам допускается отпаять два провода питания двигателя от колодки на другой стороне платы привода. После завершения работ по двигателю провода следует припаять к клеммам колодки — красный — к клемме 1, синий — к клемме 3.
5. Вынуть щётки, замерить их высоту; при высоте щеток 8 мм и менее — заменить щётки.
6. Протереть рабочую поверхность щётки бязевым тампоном.
7. Протереть коллектор бязевым тампоном, слегка смоченным бензином, вращая шкив редуктора.
8. Продуть коллектор сжатым воздухом под давлением 1—2 атм., поворачивая шкив редуктора.
9. Ослабить винт и сдвинуть хомутик 6; вставить щётки в наз 3 щёткодержателя и прижать пружиной, установить на место стакан.
10. Через отверстие в корпусе электродвигателя со стороны клапана обдува, вращением шкива редуктора поочередно установить против отверстия и протереть контакты регуляторов оборотов бязевым тампоном, слегка смоченным бензином. Установить хомутик 6 на место и закрепить его винтом.
11. Укрепить редуктор с двигателем в прежнем положении. Обратить внимание, чтобы штуцер обдува не касался механизма регулятора оборотов электродвигателя, одеть шланг на штуцер стакана.
16.4.8. С м а з к а к а с с е т н о г о м е х а н и з м а
1. Отвернуть гайку с четырьмя отверстиями, крепящую верхний подкассетник специальным ключом из ЗИП.
2. Вставить иглу шприца в отверстие вала (см. рис. 12).
3. Ввести 0,05 смз масла ОКБ-132-21.
4. Завернуть гайку.
16.4.9. О ч и с т к а и п р о м ы в к а к л а п а н а о б д у в а
1. Отвинтить винт, крепящий колонку 7 (см. рис. 17) на плате привода, сместить колонку.
2. Ослабить два винта 9 и электромагнит 10 с поршнем из корпуса держателя, предварительно отметив риской положение электромагнита в держателе.
3. Промыть растворителем № 645 поршень и протереть бязевым тампоном.
4. Промыть растворителем № 645 все отверстия корпуса клапана 7 (рис. 13) обдува и продуть сжатым воздухом.
5. Вставить поршень в отверстие корпуса и установить электромагнит на прежнее место, закрепить двумя винтами 9 (см. рис. 17), установить и закрепить винтом колонку 7.
6. Убедиться в отсутствии заедания при движении поршня в отверстии корпуса клапана обдува.
7. Промыть спиртом контакты контактной труппы, смонтированной на торце электромагнита.
П р и м е ч а н и е: После проведения работ по (пп. 1—8 (см. табл. 3)) следует выполнить следующие операции:
— надеть пассик на шкивы муфт;
— подключить вилку 13 штепсельного разъёма;
— поднести плату привода к стойкам и, не устанавливая ее, надеть пассик электромагнитных муфт на шкив редуктора и на желобы муфт;
— установить плату привода на нижние ограничительные шайбы, поставить верхние ограничительные шайбы и закрепить ее гайками;
— надеть пассик привода на желобы шкивов.
16.4.10. С м а з к а р е д у к т о р а э л е к т р о д в и г а т е л я
1. Отвинтить винты, крепящие крышку смазочного окна редуктора.
2. Набрать в медицинский шприц смазку ЦИАТИМ-221 (или ОКБ-122-7-5).
ВНИМАНИЕ! Смазку редуктора следует производить только той смазкой, которая применена в редукторе; на крышке смазочного окна редуктора со смазкой ОКБ-122-7-5 имеется надпись «СМАЗКА», со смазкой
ЦИАТИМ-221 — надпись «СМАЗКА ЦИАТИМ-221». Смещение смазок НЕ ДОПУСТИМО.
3. Нанести иглой шприца смазку на торцевые зубья двух шестерён редуктора, провернув шестерни не менее одного оборота (вращая шкив редуктора).
4. Нанести смазку на оба барабана редуктора, для чего, введя иглу шприца между витками пружины и перемещая ее вдоль образующей барабана, провернуть барабан не менее одного оборота (вращая шкив редуктора).
П р и м е ч а н и е: При смазке рабочих поверхностей барабана недопустимо образование наплывов смазки; поверхность должна быть смазана равномерно тонким слоем; избыток смазки между витками пружины приводит к отказу редуктора при эксплуатации ЛПМ при низких температурах.
5. Закрыть смазочное окно крышкой, завинтив два винта. Схема смазки приведена на (рис. 16),
16.4.11. И з м е р е н и е т о к а, п о т р е б л я е м о г о э л е к т р о д в и г а т е л е м
1. Подключить электропитание к штепсельному разъёму ЛПМ через амперметр на З А.
2. Включить ЛПМ и измерить потребляемый ток в установившемся режиме.
3. Выключить ЛПМ.
4. Извлечь из гнезда ВП1-1-3 А.
5. Включить ЛПМ и измерить потребляемый ток.
6. Определить разность измерений, выполненных по (п. 2 и п. 5), которая будет равна току, потребляемому электродвигателем.
7. Ток, потребляемый электродвигателем не должен превышать 0,7 А. Электродвигатель, имеющий ток потребления более 0,7 А, заменить.
8. Установить в гнездо предохранитель ВП1-1-3 А.
16.4.12. З а м е н а м а г н и т н о й л е н т ы
1. Отвести следящий щуп 2 (см. рис. 12).
2. Ослабить винты 10 специальным ключом из ЗИП. Отворачивать винты до упора не допускается.
3. Снять верхнюю кассету.
4. Выбрать магнитную ленту из рабочего тракта.
5. Снять нижнюю кассету.
6. Освободить кассеты от ленты с помощью УПЛ-01 7. Отмотать от стандартной бобины кусок
7. Отмотать магнитной ленты длиной 1,5 м. На участке, длиной 15 ÷ 16 см, нанести с двух сторон кистью № 6 (из ЗИП) слой токопроводящей краски взятой из ЗИП. Токопроводящую краску перед употреблением тщательно взболтать.
8. Дать посохнуть краске не менее 1 ч.
9. Измерить сопротивление токопроводящего слоя. Оно должно быть не более 60 Ом, в противном случае необходимо еще раз нанести слой токопроводящей краски.
10. Заправить конец ленты в кассету.
11. Намотать на кассету ленту длиной 250 м, отсчитывая от окрашенного участка.
ВНИМАНИЕ! Склейка ленты не допускается.
12. Нанести слой токопроводящей краски с вышеуказанными параметрами на другой конец ленты на расстоянии 1,5 м от него.
13. Снять кассету с установки УПЛ-01.
14. Закрепить нижнюю кассету на нижнем подкассетнике двумя винтами.
15. Заправить ленту в рабочий тракт согласно (рис. 15).
16. Вставить в прорезь на верхней кассете свободный конец ленты и намотать шесть восемь витков рабочим слоем наружу (участок с токопроводящей краской должен находиться на кассете).
17. Закрепить верхнюю кассету на верхнем подкассетнике винтами.
П р и м е ч а н и е:
1. В ЛПМ применяются магнитные ленты типов И4605-6-21, 14606-64.
2. ЛПМ комплектуется лентой, хранившейся к моменту выпуска изделия не более 1 года. Таким образом, календарный срок годности ленты, установленной в ЗИП изготовителем, соответствует гарантийному сроку ленты (5 лет) за вычетом 1 года.
3. Замена ленты производится через 800 часов наработки и через 2 года независимо от наработки при деформации (растяжение краев неравномерная намотка) ленты при эксплуатации или после воспроизведения записи на ЛПМ ДУМС лента так же подлежит замене.
4. Применение ленты с истекшим сроком хранения недопустимо.
После проведения работ по (пп. 1—13 (см. табл. 3)) необходимо выполнить следующие операции:
— снять три колонки, необходимые для проведения регламентных работ, и положить в ЗИП;
— установить ЛПМ на нижнюю полусферу контейнера;
— приподнять основную плату ЛПМ за край (со стороны магнитных головок на высоту 60—70 мм) и подключить вилку 8 (см. рис. 9) штепсельного разъёма;
— надеть резиновые шланги 7 на штуцера с помощью приспособления для монтажа и демонтажа шлангов обдува;
— завернуть шесть винтов, крепящих ЛПМ к нижней полусфере контейнера;
— надеть верхнюю полусферу 2 (см. рис. 8) контейнера;
— закрыть замок контейнера, вращая от себя болт 5 ключом 10.
16.5. Регламентные работы по СБ-1
16.5.1. П р о в е р к а р а б о т о с п о с о б н о с т и в к о м п л е к т е
Проверку работоспособности СБ-1 производят в комплекте системы МСРП-12-96 в соответствии с (пп. 10 и 13 (подразд. 14.1)).
16.6. Регламентные работы по КУ
16.6.1. П р о в е р к а и н а с т р о й к а
Проверку и настройку КУ производят с помощью УП-МСРП в соответствии с методикой, изложенной в подразделе 14.1.
16.7. Регламентные работы по РЩ(-1)
16.7.1. П р о в е р к а р а б о т о с п о с о б н о с т и РЩ
Проверку работоспособности РЩ производят в комплекте системы МСРП-12-96, с помощью УП-МСРПИ (или импульсного осциллоскопа ИО-4 или однотипного).
Последовательность проверки:
1. Отключить кабели системы МСРП-12-96 от разъема Ш1 ГОЛОВКА ЗАПИСИ КУ и от разъемов Ш20—Ш31 РЩ.
2. Подключить кабель Ш1 — КОД. УСТР. УП-МСРП к разъёму Ш1 ГОЛОВКА ЗАПИСИ КУ.
3. Подать сигнал РК в виде напряжения +27 В на четвертую ножку разъёмов Ш20—Ш31 РЩ и напряжение 6,3 В от БП-7 (или УП-МСРП) на третью ножку указанных разъёмов.
Поочередно выбирая каналы с 1-го по 12-й, убедиться по цифровому индикатору УП-МСРП в работе блока преобразования РК. Наличию РК будет соответствовать изменение длительности временных интервалов соответствующих каналов до 1750 мкс с периодом 4±1 с.
4. После проверки отключить УП-МСРП от КУ и напряжение 27 В и 6,3 Вот разъёмов РЩ. Подключить кабели МСРП-12-96 к КУ и РЩ.
П р и м е ч а н и е: В случае отсутствия регистрации аналоговых параметров и РК по какому-либо каналу следует проверить исправность предохранителя данного канала (Пр1÷Пр12), неисправный — заменить. Доступ к плате предохранителей обеспечивается через люк в днище РЩ, закрытый крышкой.
16.7.2. П р о в е р к а р а б о т о с п о с о б н о с т и РЩ-1
Проверка работоспособности РЩ-1 производится в лаборатории или непосредственно на летательном аппарате.
А. Проверка работоспособности в лаборатории:
Соединить блоки системы МСРП-12-96 согласно схеме рис. 24, рис. 25, включить питание, подать питание от БП-7, сигнал РК (+27 В) на контакт 4 разъёмов «1»÷«12» РЩ-1.
На экране импульсного осциллографа подключенного к контрольному гнезду «С» КУ наблюдать прохождение РК (скачкообразное изменение длительности импульсов до минимума). Сигнал от имитатора датчиков устанавливается равным 0,5÷0,7 от максимального.
Подать сигнал (+27 В) РК на контакты 1÷12 разъёма «РК» РЩ-1, причем сигнал на контакт 1 разъема «РК» — в виде импульсов частотой 2 Гц длительностью 0,1 с.
На экране импульсного осциллографа, подключёного к контрольному гнезду «С» КУ, наблюдать прохождение РК (скачкообразное изменение длительности импульсов до максимума). Сигнал от имитатора датчика устанавливается равным 0,3÷0,5 максимального.
По записи на фотобумаге определяются период и длительность РК (путем сравнения отрезка, соответствующего периоду или длительности РК с интервалом следования отметки времени).
Допускается измерение периодов РК с помощью секундомера, наблюдая серию импульсов на осциллографе за время прохождения не менее 10 РК.
Б. Проверка работоспособности на летательном аппарате.
Отключить кабели системы МСРП-12-96 от разъема Ш1 ГОЛОВКА ЗАПИСИ КУ и от разъемов Х20÷Х31 РЩ-1.
Подключить кабель Ш1 КОД. УСТР. установки УП-МСРП к разъему Ш1 ГОЛОВКА ЗАПИСИ КУ.
Подать сигнал РК в виде +27 В на четвертые гнезда штепсельных разъемов «1»÷‹12» РЩ-1 и`соединить перемычками вторые и третьи гнезда указанных разъёмов.
Поочередно выбирая каналы с 1-го по 12-й убедитесь по цифровому индикатору УП-МСРП в работе блока РК. Наличию РК будет соответствовать изменение длительности временных интервалов соответствующих каналов до 1750 мкс с периодом 4±1 с.
Отключить напряжение+27 В и снять перемычки с разъёмов «1»÷«12» РЩ-1. Соединить перемычками первые и третьи гнёзда указанных разъёмов. Подать сигнал РК в виде напряжения +27 В на 1÷12 штыри разъёма «РК». Поочередно выбирая каналы с 2-го по 5-й и с 7-го по 12-й, убедиться по цифровому индикатору УП-МСРП в работе блока РК. Наличие РК будет соответствовать временных интервалов соответствующих каналов до 3900 мкс с периодом 4±1 с. Выбирая каналы 1 или 6 убедиться в наличии РК вующих длительности временных интервалов соответствующих каналов до 3900 мкс с частотой 1±0,4 Гц.
После проверки отключить установку УП-МСРП от КУ и напряжение 27 В и 6,3 В от разъёмов КУ. Подключить кабели МСРП-12-96 к КУ и РЩ-1.
П р и м е ч а н и е: В случае отсутствия регистрации аналоговых параметров и РК, по какому-либо каналу следует проверить исправность предохранителя данного канала (F1÷F12), неисправный — заменить. Доступ к плате предохранителей обеспечивается через люк на днище РЩ-1, закрытый крышкой.
Требования к регистрации разовых команд системой МСРП-12-96 с блоком РЩ-1 в период между калибровками следующие:
импульсы до уровня ОВ — период 4±1 с, длительность 0,4±0,1 с по каналам 1÷12;
импульсы до уровня 6,3 В — период 4±1 с, длительность 0,4±0,1 с по каналам 2÷5, 7÷12;
импульсы до уровня 6,3 В — частота 1±0,2 Гц, длительность 0,5±0,2 с по каналам 1,6.
16.7.3. Т е х н о л о г и я з а м е н ы п р е д о х р а н и т е л е й в б л о к а х РЩ и РЩ-1
Технология замены — предохранителей Пр÷Пр12 в блоке РЩ и предохранителей
F1÷F12 в блоке РЩ-1 системы МСРП-12-96(-1) следующая:
— выключить систему МСРП-12-96 и блок БП-7;
— отстыковать блок РЩ(-1) от кабелей системы;
— снять блок РЩ(-1) с места крепления, отвинтив четыре винта, крепящие блок за лапки корпуса;
— отвинтить четыре невыпадающих винта, крепящих люк к днищу блока, снять люк, обеспечив к плате предохранителей доступ;
— проверить с помощью тестера исправность предохранителя, номер которого соответствует номеру канала, нерегистрирующего аналоговый параметр или разовую команду;
— в случае неисправности проверенного предохранителя снять механическим способом (с помощью скальпеля) лак с мест пайки предохранителя;
— с помощью электропаяльника Р=40 Вт отпаять выводы предохранителя от стоек платы, удалить неисправный предохранитель;
— установить на место снятого предохранителя исправный предохранитель из ЗИПа (ВП1-2-0,25), отформовав выводы предохранителя по стойкам платы;
— паять с помощью электропаяльника Р=40 Вт установленный предохранитель, пользуясь припоем ПОС61 (или ПОСС61-0,5) и флюсом ФКТС;
— промыть места пайки ватой, смоченной спиртом, покрыть места пайки цепонлаком;
— закрыть люк в днище блока, завинтив четыре невыпадающих винта, ‘установив блок РЩ(-1) по месту крепления, подсоединив кабели системы МСРП-12-96 согласно маркировки;
— включить и проверить систему согласно инструкции по эксплуатации МСРП-12-96.
17. ВОЗМОЖНЫЕ НЕИСПРАВНОСТИ И МЕТОДЫ ИХ УСТРАНЕНИЯ
Рис. 44. Схема отыскания и устранения неисправностей КУ.
Рис. 45. Схема отыскания и устранения неисправностей ЛПМ.
18. УПАКОВКА, ХРАНЕНИЕ И ТРАНСПОРТИРОВАНИЕ БЛОКОВ СИСТЕМЫ МСРП-12-96(-1)
Блоки системы упаковывают в футляр и укладывают в прочную наружную тару. На наружной таре наносят с помощью трафарета нестирающейся краской надписи:
— номер упаковочного листа;
— ОСТОРОЖНО, ПРИБОРЫ;
— НЕ БРОСАТЬ, НЕ КАНТОВАТЬ;
— ВЕРХ, ВСКРЫВАТЬ ЗДЕСЬ.
Хранить блоки системы МСРП-12-96(-1) следует в футляре поставщика-изготовителя не свыше двух лет в капитальных отапливаемых хранилищах, в которых должна поддерживаться температура от +5 до +30°С при относительной влажности воздуха не выше 80%.
Все блоки системы должны быть расположены в футляре, как указано в схеме размещения на крышке футляра, и жестко закреплены.
Перед транспортированием необходимо футляр с блоками упаковать в транспортировочную тару, уплотнив его стружкой.
При транспортировании следует придерживаться положения ВЕРХ и принимать меры для уменьшения ударных перегрузок:
не бросать;
не кантовать.
П р и м е ч а н и е: Упаковку, хранение и транспортирование датчиков, согласующих устройств и блока питания производят в соответствии с техдокументацией на них.
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1
ОПИСАНИЕ РАБОТЫ ФУНКЦИОНАЛЬНЫХ УЗЛОВ КУ
1. Кадровый мультивибратор
Кадровый мультивибратор представляет собой несимметричный мультивибратор с
положительным смещением, работающий автоколебательном режиме. Принципиальная электрическая схема мультивибратора представлена на (рис. 1.1).
Мультивибратор собран на двойном триоде типа 6Н16Б-В.
Схема представляет собой двухкаскадный резистивный усилитель, причем выход одного каскада соединен с входом другого.
Рис. 1.1. Принципиальная электрическая схема кадрового мультивибратора.
Такое соединение каскадов создает условие для возникновения релаксационных колебаний так как между обоими каскадами имеется положительная обратная связь. При этом коэффициент усиления каждого каскада должен быть больше единицы. На (рис. 1.2) приведены диаграммы, характеризующие изменения сеточного и анодного напряжений на каждой половине лампы мультивибратора.
Предположим, что в какой-то момент после включения напряжения питания Л1а закрыта, Л1б открыта. Тогда напряжение на аноде Л1а велико, и С18 заряжается по цепи: R2—С18, участок «сетка—катод» открытой Л1б, сопротивление которого в это время мало, и R115. После окончания заряда С18 напряжение на сетке Л1б равно нулю. С16, заряженный ранее, когда Л1б была заперта, в это время разряжается через открытую теперь Л1б, R115, внутреннее сопротивление источника анодного напряжения и резистор R1. Падение напряжения на R1 от прохождения по нему тока разряда С16 отрицательно по отношению к сетке Л1а и ниже потенциала запирания. Поэтому Л1а заперта.
После того как ток разряда С16 уменьшится настолько, что падение напряжения на R1 станет больше потенциала запирания Л1а, она откроется и начнется разряд С18 через неё, R115, внутреннее сопротивление источника питания и R4. Запирание Л1б и отпирание Л1а мультивибратора происходит лавинообразно, т. е. происходит опрокидывание схемы скачком. В начале разряда С16 (это же относится и к разряду С18), когда ток разряда максимален, падение напряжения на резисторе R1 тоже максимально, и сетка Л1а находится под отрицательным напряжением. Если бы Л1а в дальнейшем не открывалась, то в результате уменьшения тока разряда С16 падение напряжения на R1 все время уменьшалось бы. Наконец, после прекращения разряда С16 падение напряжения на R1 уменьшилось бы до нуля, а это значит, что потенциал сетки Л1а приблизился бы к +Еа. Поэтому в схеме с «положительной» сеткой напряжение на сетке закрытой половины лампы стремится к Еа и нарастание сеточного напряжения происходит интенсивнее, чем в схеме с «нулевой» сеткой, в которой напряжение на сетке закрытой половины лампы стремится к нулю.
Стабильность частоты следования импульсов мультивибратора с «положительной» сеткой выше, так как отпирание закрытой половины лампы происходит на более крутом участке экспоненты заряда конденсатора. В КУ кадровый мультивибратор вырабатывает прямоугольные импульсы с частотой следования 12 Гц, что и определяет частоту опроса датчиков.
2. Кодирующая ячейка
Кодирующая ячейка предназначена для кодирования во время-импульсной системе напряжений датчика, согласующего устройства или отметки времени от ЭОВ, которые поступают на её вход.
Принципиальная электрическая схема одной из таких ячеек показана на (рис. 1.3).
Кодирующая ячейка представляет собой ждущий мультивибратор с катодной связью, собранный на двойном триоде типа 6Н16Б-В.
В исходном состоянии левая половина лампы (Ла) закрыта, правая. — открыта, так как R10 в цепи сетки (Лб) подключен к «плюсу» (+150 В) источника питания. Это состояние мультивибратора является устойчивым, из которого он переводится в неустойчивое после воздействия на анод Ла отрицательного импульса.
На обкладке С23, присоединённой к аноду Ла, удерживается потенциал, равный +150 В, а на другой обкладке — потенциал, примерно равный потенциалу катодов ламп. Анодный ток Iа2=Iа открытой Лб вызывает на
R60 падение напряжения Uк=1a·R60, которое отрицательной полярностью подаётся на сетку Ла и тем самым поддерживает её в запертом состоянии.
На (рис. 1.4) представлены временные диаграммы работы ждущего мультивибратора.
Положительный пусковой импульс (Uвх1) с выхода предыдущей кодирующей ячейки дифференцируется (UR102) цепочкой С21, R102 и отрицательным импульсом (Uд17) с выхода Д17, подаваемом на анод Ла; схема переводится в неустойчивое состояние. Ла открывается (Uа1), Лб — закрывается (Uа2).
С23 постепенно разряжается (Uс23) по цени «анод—катод» Ла, R60, источник напряжения +150 В, R10, С23. Падение напряжения на R10 оказывается достаточным, чтобы смещение на сетке было отрицательным и превышало (по абсолютной величине) напряжение запирания (Еgо2).
Таким образом, время разряда С23 (т. е. длительность импульса, вырабатываемого мультивибратором) зависит от анодного тока открытой Ла, а этот ток зависит от управляющего напряжения Uу и от величины сопротивления R60. Значит, длительность импульсов ждущего мультивибратора с катодной связью можно регулировать при помощи управляющего напряжения Uу, снимаемого с R78 (Uвх2).
По мере уменьшения разрядного тока падение напряжения на резисторе R10 понижается, а потенциал сетки Ug2 повышается, и когда Ug2 проходит пороговое значение Еgо2, Лб отпирается, а Ла запирается. Наступает стадия восстановления, во время которой конденсатор заряжается по цепи +150 В,
Рис. 1.2. Диаграммы работы кадрового мультивибратора.
РИСУНОК НЕ НАЙДЕН
Рис. 1.3. Принципиальная электрическая схема кодирующей ячейки.
Рис. 1.4. Диаграммы работы ждущего мультивибратора.
R8, С23, «сетка—катод» Лб, R60, «минус» источника питания. Устойчивое равновесие схемы восстанавливается по окончании заряда конденсатора.
3. Ячейка формирования
Ячейка формирования предназначена для формирования серии импульсов, обладающих достаточной мощностью для записи на магнитную ленту.
Принципиальная электрическая схема ячейки формирования представлена на (рис. 1.5).
Ячейка формирования состоит из схемы запуска (Л15б) и ждущего блокинг-генератора (Л16).
Для запуска блокинг-генератора. применён параллельный способ, для чего использована отдельная пусковая лампа (Л15б).
Чтобы не шунтировать анодную цепь блокинг-генератора, поддерживается высокое внутреннее сопротивление Л156б путём подачи отрицательного напряжения (-10÷-15 В) через R74 на её сетку.
В исходном состоянии Л15б заперта отрицательным напряжением: -10÷-15 В, а блокинг-генератор —27 В, подаваемым через R76, сеточную (W3-4) обмотку на управляющие сетки Л16. С58, накопивший отрицательный заряд после срабатывания блокинг-генератора, медленно разряжается через R75. Временные диаграммы работы ячейки формирования представлены на (рис. 1.6).
На вход схемы запуска через С57 поступает серия положительных импульсов (Uвх) с выхода усилителя смесителя. Импульс серии отпирает Л15б. Анодный ток Л15б замыкается через анодную (W1-2) обмотку импульсного трансформатора Тр2 и индуктирует в сеточной (W3-4) обмотке положительный импульс.
Тр2 включён так, что при увеличении тока в анодной обмотке потенциал сетки повышается, и между анодной и сеточной цепями лампы возникает положительная обратная связь. Происходит лавинообразное нарастание вначале анодного (I2), затем (при Ugл16<0) и сеточного токов (Ig) Л16. По мере увеличения сеточного напряжения (Ugл16) крутизна анодно-сеточной характеристики начинает убывать, а сеточный ток сильно возрастает. Напряжение на сетке лампы стремительно нарастает до тех пор, пока Ig не составит большую долю катодного тока лампы. Крутизна характеристики лампы в этот момент падает настолько, что сетка перестает управлять током анода: увеличение положительного напряжения на сетке перестает вызывать увеличение анодного тока.
Таким образом, блокинг-генератор перешёл в новое состояние, при котором Л16 открыта, а напряжение (Uал16) на ее аноде скачком уменьшилось. На этом заканчивается этап формирования фронта выходного импульса (Uвых).
Так как перепад напряжения Uал16 происходит очень быстро, то напряжение на С58 (Uc58) практически не изменяется и остаётся таким, каким было в начале скачка. Затем начинается заряд конденсатора током сетки. Скорость заряда определяется постоянной времени заряда С58, R, сетка—катод».
По мере убывания тока заряда напряжение на сетке лампы уменьшается. Однако оно ещё столь велико, что лампа продолжает оставаться в области малой крутизны характеристики, и поэтому анодный ток и напряжение на аноде лампы остаются почти неизменными.
Наконец, напряжение на сетке лампы уменьшается настолько; что крутизна характеристики увеличивается и дальнейшее уменьшение напряжения на сетке приводит к уменьшению анодного тока лампы. На этом заканчивается этап формирования вершины выходного импульса.
Когда напряжение на сетке лампы уменьшится настолько, что анодный ток лампы начинает следовать за изменением сеточного напряжения, в сеточной обмотке трансформатора индуктируется напряжение, полярность которого отрицательна по отношению к сетке лампы. Это вызовет еще большее напряжение на сетке, что приведет к дальнейшему уменьшению анодного тока и т. д.
Развивается лавинообразный процесс, в результате которого лампа закрывается.
Резкое спадание анодного тока приводит к тому, что в обмотках Тр2 индуктируются большие напряжения. В сеточной обмотке напряжение отрицательно, а в анодной обмотке положительно. Затем эти выбросы напряжения спадают. Низкое сопротивление обмоток магнитных головок записи обеспечивает апериодический процесс спадания выбросов.
Начинается последний этап работы блокинг-генераторов (промежуток между импульсами), в течение которого С58 разряжается через R75. При этом отрицательное напряжение медленно спадает. Так как лампа заперта, напряжение на ее аноде при этом не меняется. Так будет продолжаться до тех пор, пока напряжение на сетке не станет меньше потенциала запирания (Ugo). С приходом импульса серии на схему запуска произойдёт новый скачок и начинается следующий цикл работы ячейки формирования.
Выходные импульсы снимаются с нагрузочной (W5-6) обмотки Тр2.
Рис. 1.5. Схема электрическая принципиальная ячейки формирования.
Рис. 1.6. Диаграммы работы ячейки формирования.
4. Преобразователь напряжения
Преобразователь напряжения представляет собой однотактный преобразователь напряжения +27 В постоянного тока в стабилизированные вторичные напряжения:
— напряжение переменного тока для питания цепей накала р/ламп ~6,3 В =10%, 6,5 А;
— напряжение постоянного тока при питании анодных цепей р/ламп +150 В ±5%, 0,04 А;
— напряжение постоянного тока при питании цепей блокинг-генератора -27 В ±5%, 0,005 А.
Мультивибратор выполнен на транзисторах Т8, Т9 (рис. 5) с нагрузочными резисторами R158, R161 и времязадающими цепями С70, R159 и С71, R160. Широтноимпульсный модулятор выполнен на транзисторе Т5, резисторе R91 и конденсаторе С72. Усилитель мощности содержит предварительные каскады усиления на транзисторах Т6, Т11 и выходной ключевой каскад, выполненный на двух параллельно включённых транзисторах Т1, Т2 и выходном трансформаторе Тр1 в коллекторной цепи Т1, Т2.
Вторичное напряжение 6,3 В с выходного трансформатора подается непосредственно на накальные цепи р/ламп, а выходные напряжения +150 В, -27 В выпрямляются с помощью диодов Д34÷ДЗ6, Д40 и сглаживаются фильтрами Др1, С63 и Др2, С64.
Преобразователь работает по однотактной схеме с прямым включением выпрямительных диодов, т. е. токи во вторичных обмотках протекают во время открывания выходного ключа.
Во время, когда ключ закрыт, ток в нагрузку поступает за счёт энергии, накопленной в дросселях Др1, Др2 через открывающие диоды ДЗ7÷0ДЗ9, Д41. Для стабилизации выходных напряжений при изменениях напряжения сети выходное напряжение -27 В через делитель R155, R156, R157 поступает на каскад сравнения, выполненный на транзисторе Т7, на который через стабилитрон подаётся и опорное напряжение. При отклонениях выходного напряжения от величины, установленной с помощью резистора R156 токи коллектора Т7, базы и коллектора Т5 изменяются, что приводит к изменению времени перезаряда конденсатора С72, от которого зависит время закрытого состояния транзистора Т10, т. е. скважность работы преобразователя. Частота работы ключа находится в пределах 25÷30 кГц.
Мультивибратор (Т8, Т9) и широтноимпульсный модулятор (Т5) питаются стабилизированным напряжением с цепи параметрической стабилизации R90, ДЗЗ. Цепь Д42, R163 служит для защиты элементов преобразователя от выбросов во входной сети по напряжению, превышающих величину 35÷40 В.
На элементах R92, С60, Д44 выполнена схема, обеспечивающая плавное нарастание тока потребления при включении сети 27 В.
Для обеспечения работоспособности МСРП-12-96 после резкого падения напряжения питания ниже 22 В, в схему преобразователя напряжения введена ограничительная цепочка, состоящая из транзистора Т15, резистора R174 и стабилитрона Д47.
Рис. 1.7. Схема функциональная преобразователя напряжения.
ПРИЛОЖЕНИЕ 2
ИНСТРУКЦИЯ ПО ИЗГОТОВЛЕНИЮ ТОКОПРОВОДЯЩЕЙ КРАСКИ
1. Общие сведения.
Инструкция даёт описание состава и способа изготовления токопроводящей краски для нанесения на магнитную ленту.
2. Технические требования,
Окрашенная поверхность ленты должна быть гладкой, без заметных крупинок; сопротивление слоя краски на ленте шириной 6,25 мм и длиной 200—220 мм не должно превышать 60 Ом.
3. Применённые материалы.
3.1. Порошок серебряный чешуйчатый.
3.2. Смола ТЛ (для ленты на лавсановой основе).
3.3. Хлористый метилен (для ленты на лавсановой основе).
3.4. Бензин авиационный.
4. Оборудование и приспособления.
4.1. Шёлковое сито № 67.
4.2. Кисть художественная № 5—8.
4.3. Вискозиметр ВЗ-4.
4.4. Ступка фарфоровая с пестиком.
4.5. Стакан химический.
5. Состав токопроводящей краски.
5.1. Для лент на лавсановой основе (тип И4605-6-21, И4606-6-21, И4617-6-12):
порошок серебряный чешуйчатый — 2 в. ч.;
раствор смолы ТФ-60 в хлористом метилене (13,5 г смолы на 100 г растворителя) — 1в. ч.
6. Изготовление токопроводящей краски.
При работе с лавсановой лентой: размельчить смолу ТФ-60 и растворить при периодическом встряхивании в хлористом метилене в стеклянном сосуде с притёртой пробкой.
Взвешенные количества порошка серебра и связующего компонента (раствора смолы ТФ-60) растереть в ступке до тех пор, пока поверхность высушенного мазка не будет гладкой, без крупинок. Далее краска разводится растворителем до условной вязкости 10—13 по ВЗ-4. Готовая краска хранится в герметичной стеклянной ёмкости.
7. Способ применения.
Перед нанесением краски на ленту, поверхность ленты необходимо протереть ватным тампоном, смоченным бензином, и просушить в нормальных условиях 10—15 минут.
Дважды, с интервалом в 5 минут, краску нанести на ленту кистью, ровным слоем и сушить в нормальных условиях в течение 1 часа, после чего окрашенный участок ленты проверяют на соответствие требованиям (п. 2) настоящей инструкции.
П р и м е ч а н и е:
- При загустевании краски её необходимо разбавить соответствующим растворителем до исходной вязкости.
- Перед употреблением краску необходимо тщательно перемешать до исчезновения осадка серебряного порока.
ПРИЛОЖЕНИЕ 3
КРАТКОЕ ОПИСАНИЕ БЛОКА ПИТАНИЯ БП-7
1. Назначение
Блок питания БП-7 (рис. 3.1) предназначен для стабилизированного питания датчиков и согласующих устройств, входящих в комплект системы МСРП-12-96.
2. Основные технические данные
Напряжение питания постоянного тока -27 В ±10%. .
Нормальное стабилизированное выходное напряжение постоянного тока — 6,3 В.
Ток нагрузки — 0,7 А.
Потребляемый ток — не более 1 А.
Выходное напряжение при изменениях входного напряжения на ±10% и тока нагрузки от 0,07 до 0,7 А изменяется:
а) в нормальных климатических условиях — не более чем на ±1,5%;
б) при изменениях температур окружающей среды от +60 до -60°С — не более чем на ±2%.
Амплитуда переменной составляющей напряжения при максимальной нагрузке — не более ±2% от номинального значения.
Рис.3.1. Блок питания БП-7.
Рис. 3.2. Схема электрическая принципиальная блока питания БП-7.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ
(к блоку питания БП-7).
П р и м е ч а н и е: Сопротивление R7 со знаком «*» подбирается таким, чтобы ток в цени был равен 50 мА.
Температурный интервал — от -60 до +60 °С.
Масса — не более 2,5 кг.
3. Принцип работы но принципиальной электрической схеме (рис. 3.2)
Блок питания состоит из преобразователя и стабилизатора напряжения.
Преобразователь выполнен по двухтактной схеме на транзисторах ПП1, ПП2 и трансформаторе Тр1.
На штыри 1 и 2 штепсельного разъема Ш1 подводится постоянное напряжение, которое преобразуется в напряжение переменного тока и трансформируется.
На входе трансформатора переменный ток выпрямляется диодами Д4, Д5 и поступает на стабилизатор последовательного типа, состоящий из регулирующего транзистора ППЗ, согласующих транзисторов ПП4 и ПП5 и усилителя постоянного тока, выполненного на транзисторе ПП6.
В качестве опорного диода используется стабилитрон Д10.
Напряжение питания коллектора транзистора ПП6 стабилизируется двухкаскадным параметрическим стабилизатором, состоящим из стабилитронов Д6—Д9 и резисторов RЗ и R4. Питание на стабилизатор поступает с дополнительной (V) обмотки трансформатора Тр1.
Резистор R11 и терморезистор R12 служат для температурной компенсации.
Подводимое к штепсельному разъему Ш1 напряжение постоянного тока двухтактным преобразователем преобразуется в переменное напряжение прямоугольной формы, частотой 450 Гц. Транзисторы ПП1 и ПП2 пре образователя выключаются и включаются с помощью обмоток связи Ⅱ и Ⅲ трансформатора Тр1, помещенных на сердечнике, причём в момент, когда один транзистор начинает открываться, другой закрывается.
На вторичных обмотках ⅠⅤ и Ⅴ трансформатора получается напряжение прямоугольной формы 15 и 40 В соответственно.
Выпрямленный переменный ток с обмотки ⅠⅤ трансформатора фильтруется и поступает на вход стабилизатора.
При увеличении напряжения на входе стабилизатора (или при уменьшении тока нагрузки на внешней цепи) напряжение на входе усилителя постоянного тока увеличивается, сопротивление участка «коллектор-эмиттер» регулирующего транзистора ППЗ также увеличивается и напряжение на выходе изменяется в пределах допуска (разд. 2).
При уменьшении напряжения на входе стабилизатора (или при увеличении тока нагрузки) сопротивление участка «коллектор-эмиттер» регулирующего транзистора уменьшается и на выходе стабилизатора напряжение изменяется в пределах допуска (разд. 2).
Для подрегулировки выходного напряжения служит потенциометр R9, шлиц которого находится под колпачком, расположенным под штепсельными разъёмами.
ПРИЛОЖЕНИЕ 4
КРАТКОЕ ОПИСАНИЕ УПЛОТНИТЕЛЯ РАЗОВЫХ КОМАНД УКР-4
1. Назначение
Уплотнитель разовых команд УКР-4 (рис. 4.1) предназначен для обеспечения возможности регистрации до четырех разовых команд по одному каналу системы МСРП-12-96.
Рис.4.1. Уплотнитель разовых команд УКР-4.
Рис. 4.2. Схема электрическая принципиальная уплотнителя разовых команд УКР-4.
ПЕРЕЧЕНЬ ЭЛЕМЕНТОВ
(к электрической принципиальной схеме уплотнителя разовых команд УКР-4).
ОбозначениеНаименование и типКол. Резистор R1, R2, R3 60 Ом3R4, R5 120 Ом2R6, R7 240 Ом2R8, R9 480 Ом2 Реле Р1...Р14 РЭС-10 РС4.524.314П214 Вилка Ш1 2РМТ22Б10Ш1А11Ш2 2РМТ14Б4Ш1А11
2. Основные технические данные
Максимальное количество разовых команд, записываемых по одному каналу системы МСРП-12-96 с помощью УКР-4 — 4.
На вход УКР-4 поступают разовые команды, представляющие собой напряжения 27 В. УКР-4 выдаёт на выходе уровни напряжений, однозначно определяющие любое сочетание разовых команд на его входе.
получаемых на выходе УКР-4 в нормальных условиях — не более ±0,02.
Напряжение питания УКР-4 — 6,3±50,1 В от стабилизированного источника постоянного тока.
Масса УКР-4 с ответными частями разъёмов — не более 450 г.
3. Описание работы по принципиальной электрической схеме
Принцип работы УКР-4 заключается в преобразовании нескольких разовых команд, представляющих собой напряжение 27 В, в определенные уровни напряжений.
Уровни напряжений, получаемые на выходе УРК-4, позволяют однозначно определять любое сочетание из четырёх разовых команд, поступающих на его вход.
Для преобразования любых сочетаний из четырёх разовых команд в соответствующие уровни напряжения применена схема делителя на резисторах, построенная но принципу преобразователя кода: код — напряжение.
Принципиальная электрическая схема уплотнителя УКР-4 представляет собой делитель резисторов, состоящий из двух плеч: измерительного и компенсационного, а также четырёх групп реле, на каждую из которых подаются разовые команды.
Измерительное плечо делителя включает пять резисторов (R1—R5), компенсационное плечо — четыре резистора (R6—R9).
Резисторы R2, R3, R4 и R5 находятся в отношении как 1:2:4:8, причём R1=R2=R6; RЗ=R7; R4=R8 и R5=R9,
Резисторы изготовлены из манганиновой проволоки марки ПЭМС.
В каждой группе из реле используются реле с нормально замкнутыми парами контактов (Р1—Р4, Р8—Р11) и реле с нормально разомкнутыми парами контактов (Р5—Р7, Р12—Р14).
К нормально замкнутым и нормально разомкнутым парам контактов подключены резисторы, имеющие одинаковую величину. Резистор R1 определяет Уровень напряжения, соответствующий отсутствию разовых команд на входе УКР-4.
В исходном состоянии, когда вход УКР-4 не поданы разовые команды, контакты реле R1—Р4 и Р8—Р11 замкнуты и резисторы R2—R5 измерительного делителя закорочены,
П р и м е ч а н и е: Условно обозначено:
«0» — отсутствие разовой команды;
«1» — наличие разовой команды.
Суммарное сопротивление делителя в данном случае равно R=R1+R6+R7+R8+R9=16 R1, на вход магнитного самопиcца подаётся напряжение, снимаемое с резистора R1 и равное 1/16 Uпит. Таким образом, уровень напряжения на выходе УКР-4, равный 1/16 Uпит, соответствует отсутствию разовых команд. После подачи разовой команды на вход Ш1 (7, 8) срабатывают реле Р1, Р5, Р8, Р12. При этом включается резистор измерительного плеча R2 и одновременно закорачивается резистор R6 компенсационного плеча делителя.
Суммарное сопротивление делителя в данном случае также равно 16 R1, ток делителя остаётся без изменения, и на вход магнитного самописца подаётся напряжение, снимаемое с сопротивления R1+R2, равное 2/16 Uпит.
При поступлении разовой команды на вход Ш1 (5, 6) срабатывают реле Р2, Р6, Р9, Р13. При этом включается резистор R3 и одновременно закорачивается резистор R7.
И в данном случае суммарное сопротивление делителя, подключенного к источнику питания, остаётся без изменения, но на вход магнитного самопиcца подаётся напряжение, снимаемое с сопротивления (R1-+R3=3R1) и равное 3/16 Uпит.
Аналогичные процессы всех сочетаниях УКР-4.
В таблице приведены все возможные сочетания команд на входе УКР и уровни напряжений, получаемые при этом.
На вход УКР-4 могут подаваться также три или две разовые команды, Причём, при подаче на вход УКР-4 трех разовых команд вход Ш1 (7, 8) должен быть выключён, а при подаче двух разовых команд должны быть выключены входы Ш1 (7, 8) и Ш1 (5, 6).
При любом сочетании из трех разовых команд на выходе УКР-4 получаем уровни напряжений (см. таблицу), которые соответствуют отсутствию четвёртой команды, а при любом сочетании из двух разовых команд получаем уровни напряжений, которые соответствуют отсутствию третьей и четвёртой команд.
4. Подготовка УКР-4 к работе после установки на летательном аппарате
1. С помощью тестера проверить распайку штепсельного разъёма Ш2; на 1-й штырь разъёма должен подаваться «минус» 6,3 В, на 2-й штырь — «плюс» напряжения питания 6,3 В.
После проверки правильности распайки штепсельного разъёма Ш2 подключить его к уплотнителю УКР-4.
2. Проверить распайку штепсельного разъёма Ш1, т. е, правильность подключения разовых команд: первая разовая команда подаётся на Ш1 (1, 2), вторая разовая команда — на Ш1 (3, 4), третья разовая команда — на Ш1 (5, 6) и четвёртая разовая команда — на Ш1 (7, 8).
Для проверки подключить к кодирующему устройству УП-МСРП и по цифровой индикации определить длительность импульсов канала системы МСРП-12-96, к которому подключён УКР-4, соответствующую подаче каждой разовой команде в отдельности, t1, t2, t3, t4 и длительность импульсов данного канала, соответствующую подаче максимального калибровочного напряжения.
ПРИЛОЖЕНИЕ 5
КРАТКОЕ ОПИСАНИЕ ДАТЧИКА УГЛОВЫХ ПЕРЕМЕЩЕНИЙ МУ-615А
1. Назначение
Потенциометрический датчик МУ-615А (рис. 5.1) предназначен для преобразования угловых перемещений органов управления самолёта в электрические величины. Датчик предназначен для использования в качестве штатного оборудования на самолётах и вертолётах,
Рис. 5.1. Датчик угловых перемещений МУ-615А
2. Основные технические данные
Диапазон углов перемещения движка потенциометра датчика:
рабочий — ±30±2°;
полный — ±60±2.
Погрешность измерения углов в нормальных условиях — не более ±2% от всего рабочего диапазона измерения.
Нелинейность тарировочной характеристики — не более ±3% от всего рабочего диапазона измерения.
Температурный диапазон работы — ±60°С.
Напряжение питания — 6,3 В.
Сопротивление потенциометра — 700±200 Ом.
Масса датчика — 0,16 кг.
3. Принцип работы
Принцип работы датчика угловых перемещений основан на пропорциональном изменении выходного сопротивления в зависимости от величины угла поворота токосъёмного движка.
Рис. 5.2. Схема электрическая датчика МУ-615А
4. Подготовка датчика к работе после установки на летательном аппарате
После монтажа датчика на летательном аппарате необходимо убедиться в правильности его установки: при нейтральном положении органов управления движок потенциометра датчика должен занимать среднее положение (точка на корпусе датчика и стрелка совмещены).
Если точка на корпусе датчика и стрелка не совмещены, необходимо произвести регулировку положения датчика.
Правильность установки датчиков МУ-615А можно проверить электрическим пультом ПЭ-11М путем замера относительного сопротивления этих датчиков.
Пульт ПЭ-11М подключают к розетке Ш2 от кодирующего устройства системы МСРПП-12-96 (гнездо 13 — «+6,3 В», гнездо 14 — «— 6,3 В», движок датчика подключён к гнезду, номер которого соответствует номеру канала, к которому подключён датчик).
При крайних положениях органов управления относительное сопротивление должно быть не менее 1% и не более 98%.
После проверки правильности установки датчика на летательном аппарате необходимо произвести его тарировку.
1. Задавая различные углы отклонения управления, замерить относительное сопротивление датчика (не менее девяти точек).
2. Измерение производится пультом ПЭПМ, подключённым к розетке Ш2, отстыкованной от кодирующего устройства системы МСРП-12-96 (гнездо 13 — «+6,3 В», гнездо 14 — «-6,3 В», движок датчика подключён к гнезду, номер которого соответствует номеру канала, к которому подключён датчик).
R — полное сопротивление потенциометра датчика; .
а — угол отклонения органов управления, измеряемый датчиком.
ПРИЛОЖЕНИЕ 6
КРАТКОЕ ОПИСАНИЕ ДАТЧИКА ПЕРЕГРУЗОК МП-95
1. Назначение
Потенциометрический датчик перегрузок МП-95 (рис. 6.1) предназначен для измерения линейных перегрузок и преобразования их в электрические величины,
В системе МСРП-12-96 применяются датчики МП-95 со следующими диапазонами измерений:
от - (1,5±0,3) ед. до + (1,5±0,3) ед.;
от -(2±0,5) ед. до + (5±1) ед..
2. Основные технические данные
Погрешность измерения перегрузок в нормальных условиях — не более ±2% от полного диапазона измерения.
Температурный диапазон работы датчика — от -60 до +70 °С.
Напряжение питания постоянного тока, получаемое от блока питания—6,3 В.
Полное сопротивление потенциометра датчика — от 600 до 2000 Ом.
Масса датчика — 0,4 кг.
3. Принцип работы
Действие датчика основано на преобразовании перемещения инерционной массы относительно корпуса в электрический сигнал, пропорциональный перегрузке.
Электрическая схема датчика МП-95 представлена на (рис. 6.2).
4. Подготовка датчика к работе
Перед эксплуатацией датчика необходимо проверить соответствие его показаний данным, приведенным в паспорте, на точках: «-1 ед.», «0 ед.», «+1 ед.».
Показания датчика (величины входного сигнала) измеряемого с помощью электрического пульта типа ПЭ-1 как выраженные в
Рис. 6.1. Датчик перегрузка МП-95
Рис. 6.2. Схема электрическая датчика МП-95
процентах отношения измеряемого сопротивления к полному сопротивлению потенциометра в зависимости от перегрузки.
ПРИЛОЖЕНИЕ 7
КРАТКОЕ ОПИСАНИЕ ДАТЧИКОВ ПРИБОРНОЙ СКОРОСТИ ДАС, ДАС-2
1. Назначение
Потенциометрические датчики приборной скорости ДАС (рис. 7.1) и ДАС-2 предназначены для измерения приборной скорости и выдачи сигнала в виде относительного сопротивления, пропорционального приборной скорости.
2. Основные технические данные
1. Датчики приборной скорости ДАС и ДАС-2 выдают сигналы в виде относительного сопротивления, пропорционального приборной скорости в диапазоне от 80 до 800 км/час.
2. Выходные сигналы датчика ДАС тарируются по следующим точкам: 80, 100, 200, 300, 400, 500, 600, 700, 800 км/час. Выходные сигналы датчика ДАС-2 тарируются по следующим точкам: 200, 300, 400, 500, 600, 700, 800, 900, 1000, 1100 км/час. Тарировочные кривые датчиков строятся в координатах U=f(Rотн) как среднее арифметическое между точками прямого и обратного ходов.
3. Нелинейность тарировочной кривой датчика ДАС не превышает ±4% от диапазона измерения скорости (720 км час). Нелинейность тарировочной кривой датчика ДАС-2 не превышает ±4% от диапазона измерения скорости (900 км/час).
4. Погрешности датчиков (отклонение тарируемых точек от тарировочной кривой) не превышает величин, указанных в (табл. 7.1).
Таблица 7.1
Температура окружающей среды, °СОтклонение тарируемых точек от тарировочной кривой в пределах от измеряемого диапазона скорости+20±10±2-60±3±3+60±3±3
5. Тарируемые точки, получаемые при последующих тарировках датчиков по истечении года при температуре +20±10 °С, не отличаются от первоначальной кривой более чем на 3% от диапазона измерения скорости.
6. Температурный интервал от -60 до +60 °С.
7. Датчик ДАС выдерживает перегрузочное давление, соответствующее скорости 900 км/час в течение 1 мин. Датчик ДАС-2 выдерживает перегрузочное давление, соответствующее скорости 1200 км/час в течение 1 мин.
8. Питание — постоянный ток напряжением 6,3 В от блока питания БП-7.
9. Сопротивление потенциометра датчика равно1500-200Ом+300
10. Масса датчика не превышает 1,5 кг.
3. Принцип работы датчика
Принцип работы датчика приборной скорости ДАС и ДАС-2 основан на измерении динамического давления (Рд) воздуха, соответствующего определенному значению приборной скорости, с последующим преобразованием последней в сигнал, выдаваемый в виде относительного сопротивления.
По трубопроводу полное давление (Рп) поступает в чувствительные элементы.
Статическое давление (Рст) поступает в герметический корпус датчика.
Под действием разницы полного и статического давления (Рд=Рп-Рст) чувствительные элементы прогибаются и через тяги поворачивают ось, на которой закреплена щётка, скользящая по намотке потенциометра. Выходное относительное сопротивление потенциометра измеряется пропорционально изменению скорости.
4. Проверка работоспособности датчика
(на летательном аппарате)
Произвести проверку правильности подключения ДАС и ДАС-2 в барометрической системе самолёта:
1. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно не должно быть более 10%.
2. С помощью установки КПУ-3 создать разрежение в линии статики барометрической системы не более 700 км час по индикаторной шкале установки КПУ-3.
Рис. 7.1. Датчик приборной скорости ДАС (ДАС-2).
Рис. 7.2. Принципиальная схема датчика ДАС (ДАС-2).
1—чувствительный элемент; 2—центр; 3—потенциометр; 4—щётка; 5—тяга; 6—ось; 7—трубопровод.
3. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно должно существенно увеличиваться по сравнению со значениями, замеренными по (п. 1) данного раздела.
4. Стравить разрежение линии статики. Отключить установку КПУ-3.
5. Подключить установку КПУ-3 к приёмнику полного давления ППД-1, создать в системе полного давления барометрической системы избыточное давление не более 700 км/час по индикаторной шкале установки КПУ-3.
6. Замерить относительное сопротивление датчиков ДАС и ДАС-2. Оно должно быть существенно больше сопротивления, замеренного по (п. 1) данного раздела.
7. Стравить избыточное давление в барометрической системе, отключить установку КП.
ПРИЛОЖЕНИЕ 8
КРАТКОЕ ОПИСАНИЕ ДАТЧИКОВ ДАВЛЕНИЯ ДМП-60, ДМП-100А
1. Назначение
Малогабаритный потенциометрический датчик типа ДМП-А (рис. 8.1) предназначен для измерения избыточного давления нейтральных жидкостей, газов и выдачи напряжения, пропорционального давлению, в систему МСРП-12-96.
П р и м е ч а н и е: Для защиты датчика типа ДМП-А от воздействия пульсаций давления в него встроен демпфер.
2. Основные технические данные
Шифр датчикаДиапазон измерений кгс/см3Перегрузочное давление кгс/см3ДМП-60А0—60150ДМП-100А0—100200
Температурный интервал — от -60 до +100°С.
Погрешность при работе:
при температуре от -60 до +60 °С —не более 3% от предела измерений;
при температуре +100°С — не более ±4% от предела измерений.
Полное сопротивление — 10000+500 Ом.
Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В.
3. Принцип работы датчика
Избыточное давление воздействует на чувствительный элемент 6 датчика.
В качестве чувствительного элемента применяется малогабаритная грибковая мембрана.
Под действием избыточного давления мембрана деформируется. Деформация передаётся на шток 1, поворачивает ось 5 вместе с щёткодержателем 4 и перемещает скользящий контакт 3 по потенциометру А.
При уменьшении давления возвратная пружина 2 заставляет ось следить за штоком.
Каждому значению давления соответствует определенное положение скользящего контакта относительно потенциометра, а следовательно и выходное относительное сопротивление.
4. Подготовка датчика к работе после установки на летательном аппарате
При подготовке датчика давления к работе
необходимо:
— подсоединить вилку датчика к распределительному щитку системы МСРП-12-96;
— включить бортсеть.
Проверить работоспособность датчика с помощью установки УП-МСРП, наблюдая на цифровом индикаторе поверочной установки
измерение длительности импульсов кодирующей ячейки (канала), на вход которой подаётся сигнал с датчика, при изменении избыточного давления от нуля до максимального значения.
Р И С У Н К И Н Е Н А Й Д Е Н Ы
Рис. 8.1.
Рис. 8.2.
Рис. 8.3. Схема электрическая датчика ДМП-60А (ДМП-100А)
ПРИЛОЖЕНИЕ 9
КРАТКОЕ ОПИСАНИЕ ДАТЧИКОВ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ ДВбП
1. Назначение
Потенциометрические датчики барометрической высоты ДВбП-13 и ДВбП-15 (рис. 9.1)
предназначены для измерения барометрической высоты полёта и выдачи сигналов, пропорциональных измеряемой высоте полёта.
2. Основные технические данные
Выходное сопротивление датчиков — 2000—1700 Ом.
Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В
Диапазоны измерения барометрической высоты:
для датчика ДВбП-13 — от 250 до 13000 м;
для датчика ДВбП-15 — от 250 до 15000 м.
Датчики имеют осредненную тарировочную таблицу, выражающую зависимость между измеряемой высотой полёта и выходным относительным сопротивлением при температуре +25±10°С на тарировочных точках:
для датчика ДВбП-13 — 250; 0; 1000; 2000; 3000; 4000; 5000; 6000; 7000; 8000; 9000; 10000; 11000; 12000; 13000 м;
для датчика ДВбП-15 — 250; 0; 2000; 4000; 5000; 8000; 10000; 12000; 14000; 15000 м.
Погрешность датчика (отклонение значений относительного сопротивления при повторных проверках в интервале температур внешней среды от -60 до +60°С от данных осредненной тарировочной таблицы) — не более ±3% выходного относительного сопротивления.
Температурный интервал — от -60 до +60 °С.
Сопротивление изоляции электрических цепей датчика относительно корпуса в нормальных климатических условиях — не менее 20 МОм.
Масса датчика — не более 800 г.
Рис. 9.1. Датчик барометрической высоты ДВбП-13 (ДВбП-15).
3. Принцип работы датчика
В основу работы датчиков ДВбП-13 и ДВбП-15 положен барометрический метод измерения высоты.
Принцип работы датчиков основан на функциональной зависимости между высотой и абсолютным давлением воздуха, которое уменьшается с увеличением высоты.
Так как давление для одного и того же момента времени связано с высотой определенной зависимостью, то, зная эту зависимость и измерив на некоторой высоте абсолютное давление, можно определить и величину сигнала, выдаваемого датчиками на этой высоте.
Для этого в качестве чувствительного элемента в датчиках используются анероидные коробки 1, расположенные внутри корпуса 5, сообщающегося с наружной атмосферой, вследствие чего давление в корпусе равно атмосферному на высоте полёта.
При подъёме на высоту атмосферное давление падает, и анероидные коробки 1 под воздействием сил упругости мембран деформируются (две коробки применены для создания устойчивости при воздействии на датчик вибрационных и линейных перегрузок) и с помощью кривошипно-шатунного передаточного механизма 2 (состоящего из тяги, серьги и оси) перемещают щёткодержатель со щётками 3 по потенциометру 4. При этом каждому значению атмосферного давления соответствует определенное положение щётки 3. на потенциометре 4, а следовательно, и определенная величина выдаваемого датчиком выходного относительного сопротивления.
При максимальной высоте полёта датчики выдают максимальное относительное сопротивление, но не более 98%.
При минимальной высоте полёта датчики выдают относительное сопротивление от 3 до 10%.
За относительное сопротивление принимается отношение сопротивления между клеммами 1 и З (рис. --) к сопротивлению между клеммами 1 и 2, выраженное в процентах.
4. Проверка работоспособности датчика на летательном аппарате
1. Произвести проверку правильности установки и подключения датчиков к барометрической системе самолёта.
2. Замерить относительное сопротивление датчиков. Это сопротивление должно быть не более 10%.
3. С помощью установки КПУ-3 создать разрежение в линии статики барометрической системы, но не более 700 км/час по индикаторной шкале установки КПУ-3.
4. Заменить относительное сопротивление датчиков. Оно должно существенно увеличиться по сравнению со значениями, замеренными в (п. 2) данного раздела.
5. Стравить разрежение в линии статики барометрической системы. Отключить установку КПУ-3.
Рис. 9.2. Схема принципиальная датчика ДВбП-13 (ДВбП-15).
1—чувствительный элемент (анероидная коробка); 2—кривошатунный-шатунный механизм; 3—щётка; 4—потенциометр; 5—корпус.
Рис. 9.3. Схема электрическая датчика ДВбП-13 (ДВбП-15).
ПРИЛОЖЕНИЕ 10
КРАТКОЕ ОПИСАНИЕ ДАТЧИКА ИЗБЫТОЧНОГО ДАВЛЕНИЯ ДДиП (-0,1÷+0,85)
1. Назначение
Потенциометрический датчик избыточного давления типа ДДиП (рис. 10.1) предназначен для измерения избыточного давления воздуха между кабиной летчика и атмосферой и выдачи сигнала, пропорционального измеряемому давлению.
Рис. 10.1. Датчик избыточного давления ДДиП (-0,1...+0,85).
Рис. 10.2. Схема принципиальная датчиков ДДиП (-0,1...+0,85).
1—чувствительный элемент (манометрическая коробка); 2—кривошатунный-шатунный механизм; 3—щётка; 4—потенциометр; 5—корпус.
Рис. 10.3. Схема электрическая датчика ДДиП (-0,1...+0,85).
2. Основные технические данные
Напряжение питания постоянного тока от блока питания БП-7 — 6,3 В.
Выходное сопротивление датчика между клеммами 1 и 2 — 1600±700 Ом.
Диапазон измерения давлений — от -0,1 до +0,85 кгс/см2.
Датчик имеет осредненную тарировочную таблицу, выражающую зависимость между измеряемым перепадом давления и выходным относительным сопротивлением при температуре +25±10°С в тарируемых точках: -0,1; 0; +0,1; +0,3; +0,5; +0,7; +0,8; +0,85 кгс/см2.
Погрешность датчика — не более 3% выходного относительного сопротивления.
Нелинейность тарировочной характеристики датчика при температуре +25±10°С — ±2% выходного относительного сопротивления.
Температурный интервал — от -60 до +60°С.
Масса датчика — не более 800 г.
3. Принцип работы датчика
Принцип работы датчика основан на использовании упругих свойств чувствительного элемента (манометрических коробок).
Полости манометрических коробок через динамический штуцер соединены с кабиной лётчика, а корпус датчика через статический штуцер — с приёмником воздушного давления.
При измерении величины перепада между давлениями в кабине и окружающей самолёт атмосфере мембраны манометрических коробок 1 прогибаются (две коробки применены для создания устойчивости при воздействии на датчик вибрационных и линейных нагрузок). Подвижный центр манометрических коробок совершает при этом возвратно-поступательное движение, которое посредство» кривошипно-шатунного передаточного механизма 2 (тяга, серьга и ось) преобразуется во вращательное движение оси и далее перемещение щёткодержателя со щётками 3 по потенциометру 4. При этом каждому значению перепада давлений соответствует определенное положение щётки 3 на потенциометре 4, а, следовательно, и определенная величина выдаваемого датчиком выходного относительного сопротивления.
В случае равенства давления в кабине и в окружающей самолёт атмосфере манометрические коробки находятся в положении, соответствующем перепаду давлений, равному нулю, при этом датчик выдает выходное относительное сопротивление 50±5%.
Если значение максимального перепада давлений положительное, т. е. давление в кабине больше атмосферного давления, то датчик выдаёт относительное сопротивление не более 98%; если значение максимального перепада давлений отрицательное, т. е. давление в кабине меньше атмосферного давления, то датчик выдаёт относительное сопротивление от 3 до 10%.
За относительное сопротивление принимается отношение сопротивления между клеммами 1 и (рис. 10.3) к сопротивлению между клеммами 1 и 2, выраженное в процентах.
ПРИЛОЖЕНИЕ 11
КРАТКОЕ ОПИСАНИЕ ДАТЧИКА УГЛОВОЙ СКОРОСТИ ДУСУ-1-30АС
1. Назначение
Унифицированный датчик угловой скорости типа ДУСУ (рис. 11.1) предназначен для выдачи электрического сигнала в систему МСРП-12-96, пропорционального угловой скорости летательного аппарата вокруг одной из его осей.
2. Основные технические данные
Диапазон измеряемой угловой скорости — ±30 град./с.
Температурный интервал — от -60 до +60 °С.
Порог чувствительности датчика в диапазоне температур от -60 до +60°С — не более 400±58 Гц,
Масса датчика — не более 450 г.
Напряжение на потенциометре от постоянного источникаНапряжение от источника переменного трёхфазного тока на гиромоторЧастота переменного тока на гиромоторПотребляемый переменный ток на фазу, не более5—30 В36±3,6 В40±08 Гц0,3 А
Рис. 11.1. Датчик угловой скорости ДУСУ-1-30АС
Рис. 11.2. Схема кинематическая датчика угловой скорости ДУСУ-1-30АС двухстепенного гироскопа.
1—ротор гироскопа; 2—рамка; 3—подшипник.
3. Принцип работы
Принцип работы датчика угловых скоростей основан на свойстве гироскопа с двумя степенями свободы совмещать вектор собственного вращения с вектором вынужденного вращения по кратчайшему расстоянию.
На (рис. 11.2) представлена схема двухстепенного гироскопа.
При действии на датчик угловой скорости вектор которой совмещен с вектором кинетического момента Н, возникает гироскопический момент М, равный векторному произведению НХω. Величина гироскопического момента прямо пропорциональна угловой скорости вынужденного вращения, так как кинетический момент гироскопа остается постоянным.
Составляющие гироскопического момента по осям х, у, z равны векторному произведению кинетического момента на соответствующую составляющую вектора угловой скорости
Мх=Н·ωу; Мy=Н·ωx; Мz=Н·ωz.
Составляющая ωz не вызывает появления гироскопического момента, так как направления векторов Н и ωz совпадают. Гироскопический момент Мy, уравновешивается реакциями опор.
Гироскопический момент Мх вызывает вращение рамки гироскопа вокруг оси х.
Следовательно, двухстепенный гироскоп реагирует только на угловую скорость Мпр, вектор которой перпендикулярен оси вращения рамки и вектору кинетического момента Н гироскопа.
Вращению рамки вокруг оси к противодействует пружина, которая создает момент Мпр, пропорциональный углу отклонения рамки. Когда противодействующий момент пружины станет равным гироскопическому, вращение рамки прекратится.
Так как угол поворота рамки прямо пропорционален гироскопическому моменту Мх, а гироскопический момент пропорционален угловой скорости, то угол поворота рамки пропорционален угловой скорости летательного аппарата ωу вокруг оси у.
На (рис. 11.2) представлена электрокинематическая схема датчика типа ДУСУ, поясняющая работу датчика. Под действием гироскопического момента Мх гироузел, состоящий из гиромотора 1 и рамки 2, поворачивается вокруг оси подвеса.
Поворот гироузла передается через кинетическую пару палец 3 — сухарь 4 на щетку 6.
Перемещение щеток по обмотке потенциометра 5 пропорционально изменению угловой скорости вращения летательного аппарата.
Угловая скорость летательного аппарата измеряется как величина, пропорциональная напряжению потенциометра между средней точкой и щеткой, или как величина относительного сопротивления потенциометра между щеткой и контактом потенциометра.
При отсутствии угловой скорости вращения датчика вокруг измерительной оси гиро-
скопический момент равен нулю. Щетка 6 удерживается двумя пружинами 7 в среднем положении на обмотке потенциометра 5. При
этом величина выходного напряжения равна нулю, а выходное относительное сопротивление равно 50% от полного сопротивления потенциометра.
При вращении датчика по часовой стрелке со скоростью, равной диапазону измерения, гироскопический момент уравновешивается пружинами, когда щетка дойдет по обмотке потенциометра до положения 1. Выходное напряжение при этом равно 50% напряжения питания потенциометра, а относительное сопротивление равно нулю.
При промежуточных значениях угловых скоростей выходное напряжение и относительное сопротивление пропорциональны величине угловой скорости летательного аппарата вокруг оси у.
Для проверки функционирования датчика предусмотрен моментный датчик, который позволяет поворачивать гироузел при отсутствии угловой скорости вокруг измерительной оси.
Моментный датчик представляет собой постоянный магнит 10, посаженный на ось гироузла. Катушка 11 закреплена неподвижно к корпусу.
При пропускании постоянного тока через катушку в ней возникает магнитное поле, под действием которого магнит и вместе с ним гироузел поворачивается на некоторый угол.
Рис. 11.3. Схема электрокинематическая датчика угловой скорости ДУСУ-1-30АС.
1—гиромотор; 2—рамка; 3—палец; 4—сухарь; 5—потенциометр;6—щётка; 7—прукина; 8—лопатка ротора демпфера; 9—лопатка статора демпфера; 10—магнит; 11—катушка.
Рис. 11.4. Схема электрическая датчика угловой скорости ДУСУ-1-30АС.
При изменении угловой скорости вращения летательного аппарата гироузел из одного положения переходит в другое. Благодаря упругости пружин гироузел не сразу устанавливается в новом положении, а начинает колебаться. Эти колебания передаются на щётку и снимаются с прибора, как колебания выходного сигнала.
Для успокоения колебаний гироузел в датчике применён жидкостный демпфер А, в котором энергия колебаний гасится при перемещении жидкости лопатками 8 ротора.
4. Подготовка датчика к работе после установки на летательном аппарате
1. Подсоединить вилку с выводами от потенциометра датчика к распределительному щитку системы МСРП-12-96.
2. Включить бортсеть.
3. Проверить работоспособность датчика с помощью установки УП-МСРП, наблюдая на цифровом индикаторе поверочной установки изменение длительности импульсов кодирующей ячейки (канала), на вход которой подаётся сигнал с датчика, при изменении угловой скорости вращения от 0 до ±30 град./с.
ПРИЛОЖЕНИЕ 12
КРАТКОЕ ОПИСАНИЕ РАСПРЕДЕЛИТЕЛЕЙ СИГНАЛОВ РСАГ 1186А И РСАГ 1186Б
1. Назначение
Распределитель сигналов (рис. 12.1) является силовым повторителем сигналов крена и тангажа самолёта, выдаваемых гироскопическим датчикам дистанционного авиагоризонта АГД-1, и предназначен для одновременной выдачи этих сигналов, разных или одинаковых по характеристикам, нескольким потребителям на самолёте.
2. Основные технические данные
Напряжение питания:
переменного тока — 36±2 В частотой 400±8 Гц;
постоянного тока — 27±2,7 В.
Потребляемые токи:
переменный ток напряжением 36 В частотой 400 Гц — не более 0,7 А в фазе;
постоянный ток напряжением 27 В — не более 0,5 А.
Погрешность дистанционной передачи углов крена и тангажа с гироскопического датчика АГД-1 на выходные оси распределителя:
на 0° не более ±0,5°;
до 30° — не более ±1°;
свыше 30° — не более ±1,5°.
Чувствительность распределителя сигналов (минимальный угол поворота гироскопического датчика АГД-1, при котором начинается перемещение осей распределителя) — не более ±10 угловых минут.
Добротность отработок канала крена и тангажа распределителя сигналов (скорость отработки на градус рассогласования) 50 град./сек на градус.
Скорость отработки углов рассогласования тангажа и крена при нормальной температуре и при полном сигнале не менее 360 град./с. в
Масса распределителя сигналов — 5 кг.
3. Принцип работы
Передача показаний по крену и тангажу осуществляется двумя одинаковыми следящими системами крена и тангажа, которые воспроизводят соответственно углы крена и тангажа, замеряемого гиродатчиком АГД-1.
Для выдачи сигналов крена и тангажа в распределителе сигналов используются потенциометры и сельсины датчики:
в варианте 1186Б — два блока потенциометров;
в варианте 1186А — один блок потенциометров и один сельсин-датчик,
(этим распределитель сигналов 1186Б отличается от 1186А).
Датчиками сигналов крена и тангажа для автопилотов АП-28Ж1, АП-282Ж1Б являются потенциометры с сопротивлением 1730±110 Ом.
Сельсины-датчики следящей системы крена и тангажа установлены на соответствующих рамах гиродатчика АГД-1.
Сельсины-приёмники крена и тангажа расположены в распределителе сигналов.
При отклонении самолёта относительно поперечной или продольной осей происходит рассогласование между сельсином-датчиком гиродатчика и соответствующим сельсином-приёмником распределителя. Сигнал рассогласования усиливается полупроводниковым усилителем и попадает на обмотку управления двигателя генератора ДГ-1, который через редуктор передает вращение ротору сельсина-датчика, приводя его в положение, соответствующее положению ротора сельсина гиродатчика АГД-1.
Рис. 12.1. Распределитель сигналов РСАГ-1186А (РСГА-1186Б).
При обработке ротора сельсина-приёмника тангажа или крена его движение с помощью безлюфтного зубчатого зацепления передаётся щёткам потенциометров и ротору сельсина-датчика распределителю сигналов.
Таким образом, распределитель сигналов воспроизводит углы тангажа и крена самолета и выдаёт с потенциометров и сельсинов-датчиков сигналы, зависящие от углов тангажа и крена самолета.
Для улучшения динамических характеристик следящей системы сигнал двигателя-генератора ДГ-1 в качестве отрицательной обратной связи попадает на вход усилителя, где суммируется с напряжением ротора сельсина-датчика.
В следящей системе тангажа предусмотрено реле коммутации, которые срабатывают по сигналу коммутатора гиродатчика АГД-1 при перевернутом положении следящей рамы гиродатчика (см. описание АГД-1) и своими контактами переключает обмотку ротора сельсина-приёмника тангажа. Этим обеспечивается правильная обработка следящей системы тангажа при любом положении следящей рамы гиродатчика АГД-1.
В каждом канале предусмотрены концевые выключатели, которые механически связаны с осью сельсина-приёмника тангажа или крена и срабатывают при повороте ротора в любую сторону на угол 76,5±3°.
Для обеспечения проверки работоспособности следящих систем крена и тангажа в каждом канале распределителя предусмотрен трансформатор, вторичная обмотка которого включена последовательно с обмотками ротора сельсина-приёмника и двигателя-генератора ДГ-1.
Рис. 12.2. Кинематическая схема распределителя сигналов РСАГ-1186А.
1—двигатель-генератор; 2—муфта проскальзывания; 3—сельсин-приёмник; 4—потенциометрические блоки для варианта 1186Б (сельсин-датчик для варианта, 1186А); 5—потенциометрический блок (для обои вариантов);6—пушечный зажим.
Для проверки работоспособности на первичную обмотку подаётся напряжение переменного тока 36 В частотой 400 Гц. Сигнал со вторичной обмотки попадает на вход усилителя. С выхода усилителя напряжение подаётся на обмотку управления двигателя-генератора ДГ-1, который через редуктор отрабатывает ротор сельсина-приёмника, что свидетельствует о работоспособности следящей системы распределителя сигналов.
4. Подключение распределителя сигналов к гиродатчику АГД-1, источникам питания и потребителям сигналов
У распределителя предусмотрено три штепсельных разъёма:
- штепсельный разъём Д — для подключения распределителя сигналов к гиродатчику и источникам питания;
- штепсельный разъём Ж — для подключения потребителей по каналу крена;
- штепсельный разъём Ц — для подключения потребителей по каналу тангажа.
На штырьки этих штепсельных разъёмов выведены:
— сигналы сельсинов-датчиков крена и тангажа гиродатчика;
— цепи концевых выключателей;
— первичные обмотки трансформаторов, предназначенных для проверки работоспособности каналов крена и тангажа;
— питание потенциометров крена и тангажа;
— средние точки и щетки потенциометров крена и тангажа;
— роторные и статорные концы сельсинов-датчиков крена и тангажа;
— сигнал коммутации, снимаемый с гиродатчика (штыри 32 разъема «Ц»).
ПРИЛОЖЕНИЕ 13
КРАТКОЕ ОПИСАНИЕ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА БР-40
1. Назначение
Распределительный блок БР-40 (рис. 13.1) служит для выдачи сигналов курса постоянного и переменного тока в диапазоне от 0 до 360° и предназначен для работы на летательных аппаратах с курсовыми системами КСИ, КС, ГМК, ТКС-П и системой курсовертикали СКВ-2Н.
Кроме того, блок может быть использован в качестве повторителя угловых положений различных датчиков в сельсинных дистанционных передачах. Количество сельсинов-приёмников типа 573, подсоединяемых к сельсину-датчику блока, должно быть не более семи (сельсины-приёмники должны работать в режиме слежения за сельсином-датчиком).
2. Основные технические данные
Питание — 3~400 Гц, 36 В±5% и 2—27 В +10%.
Напряжение питания выходных потенциометров — 6,3 В постоянного тока от блока
питания БП-7.
Температурный интервал — от -60 до +60 °С.
Потребляемая мощность:
по постоянному току — более 35 Вт;
по переменному току — не более 30 ВА.
Погрешность блока по шкале — не более ±2°.
Погрешность сельсина-датчика при температурах от -60 до +60°С — не более ±45.
Погрешность выходных линейных потенциометров:
при температуре +20°С — не более ±1°; при температурах от -60 до +60°С — не более ±2°.
Сопротивление линейных потенциометров — 4 кОм.
Время готовности блока к работе с момента включения курсовой системы — не более 2 мин.
Масса — не более 2 кг.
3. Описание работы распределительного блока по блок-схеме
Передача показаний по курсу от курсовых систем блоку БР-40 осуществляется следующим образом: статор сельсина-приёмника М1 подключается к ротору дифференциального сельсина механизма согласования курсовой системы или к сельсину-датчику курса курсовой системы. При рассогласовании между сельсином-датчиком курсовой системы и сельсином-приёмником блока БР-40 с ротора сельсина приёмника М1 сигнал рассогласования в виде переменного тока подаётся на вход усилителя У1. С выхода усилителя усиленный сигнал поступает на управляющую обмотку двигателя М3, который через редуктор вращает ротор сельсина-приёмника до согласованного положения, соответствующего курсу самолёта.
Рис. 13.1. Распределительный блок БР-40.
Рис. 13.2. Блок-схема распределительного блока БР-40.
На одной оси с ротором сельсина-приёмника жестко укрепляется ротор сельсина-датчика М2, потенциометр R1, щётки потенциометра R2 и щётки коллектора Э1.
Статор сельсина-датчика, потенциометр R2 с коллектором Э1 и щетки потенциометра R1 закреплены на корпусе блока соосно с осью блока.
При отработке ротора сельсина-приёмника М1 его движение передаётся ротору сельсина-датчика М2, потенциометру R1, щёткам потенциометра R2 и щётке коллектора Э1, которые воспроизводят углы курса самолёта, в результате чего со статора сельсина-датчика М2 (если ротор запитан переменным напряжением и с потенциометров R1 и R2 снимаются электрические сигналы переменного и постоянного тока, пропорциональные курсу.
ПРИЛОЖЕНИЕ 14
КРАТКОЕ ОПИСАНИЕ ПРЕОБРАЗОВАТЕЛЯ ОБОРОТОВ ПО-15
1. Назначение
Преобразователь оборотов ПО-15 (рис. 14.1) служит для преобразования напряжения датчика типа ДТЭ, частота которого пропорциональна оборотам авиадвигателя, в постоянное напряжение.
2. Основные технические данные
Диапазон изменения выходного напряжения при измерении оборотов от 10 до 110% соответственно — от 0,4 до 6 В.
Температурный интервал — от -60 до+60 °С.
Погрешность — не более ±2,5%.
Питание — сеть постоянного тока напряжением от 20 до 30 В.
Потребляемая мощность — не более 2,5 Вт.
Масса — не более 2,5 кг.
3. Принцип работы
Преобразователь оборотов ПО-15 преобразует частоту входного напряжения от датчика оборотов в прямоугольные импульсы стабильной длительности и амплитуды и выделяет среднее значение импульсного напряжения, пропорциональное оборотам авиадвигателя.
Работа ПО-15 происходит следующим образом. Напряжение от датчика оборотов поступает на вход транзисторного умножителя частоты, формирующего прямоугольные импульсы напряжения, частота следования которых в 2 раза выше частоты входного напряжения.
Импульсы напряжения удвоенной частоты усиливаются усилителем-ограничителем и дифференцируются. Продифференцированные отрицательные импульсы запускают ждущий мультивибратор, который формирует прямоугольные импульсы напряжения стабильной длительности.
Импульсы напряжения ждущего мультивибратора после усиления усилителем, работающим в режиме переключения, поступают на вход трехзвенного ГС-фильтра. На выходе фильтра выделяется среднее значение прямоугольного импульсного напряжения, величина которого пропорциональна частоте следования импульсов, т. е. частоте входного напряжения.
Для уменьшения влияния изменения напряжения питания на работу схемы и для стабилизации амплитуды прямоугольных импульсов используется стабилизатор напряжения.
4. Подготовка к работе после установки на летательном аппарате
При подготовке преобразователя оборотов к работе необходимо:
— подсоединить преобразователь к датчику типа ДТЭ, распределительному щитку системы МСРП-12-96 и источнику питания согласно схеме внешних соединений (см. рис. 14.3);
— включить бортсеть.
Проверить работоспособность ПО-15 с помощью УП-МСРП, наблюдая на цифровом индикаторе поверочной установки изменение длительности импульсов кодирующей ячейки, на вход которой подаётся сигнал с ПО-15, при изменении числа оборотов авиадвигателя от 0 до 110%.
Рис. 14.1. Преобразователь оборотов ПО-15.
Рис. 14.2. Блок-схема преобразователя оборотов ПО-15.
Рис. 14.3. Схема внешних соединений преобразователя оборотов ПО-15.
ПРИЛОЖЕНИЕ 15
КРАТКОЕ ОПИСАНИЕ СИГНАЛИЗАТОРА СКОРОСТНОГО НАПОРА ССА-0,27±2,2И
1. Назначение
Сигнализатор скоростного напора ССА-0,27±2,2И (рис 15.1) предназначен для включения системы МСРП-12-96 при достижении величины приборной скорости, выставленной по шкале прибора.
2. Основные технические данные
Сигнализатор замыкает электрическую сеть при достижении величины приборной скорости, выставленной по шкале прибора.
Рабочий диапазон скоростей — от 70 до 220 км/час. температурный интервал — от +60 до
-60°С.
Токовая нагрузка сигнализатора при питании постоянным током напряжения 27 В ±10% — не более 0,3 А.
Масса — не более 1 кг.
3. Принцип работы
Работа сигнализатора основана на функциональной зависимости между измеряемым динамическим давлением и упругими деформациями чувствительного элемента.
Полное давление Рп поступает через штуцер полного давления 1·(Д) в полость чувствительного элемента. Через штуцер статического давления 9 (С) в корпус сигнализатора поступает статическое давление Рст и на чувствительный элемент будет действовать разность между полным и статическим давлением — динамическое давление:
Рдпи=Рп—Рст.
Под действием возрастающего динамического давления центр 3 мембраны 2 перемещается, давит на нижнюю пружину 4, несущую контакт 5, до замыкания с контактом 6, укрепленным на верхней пружине.
При спаде динамического давления центр 3 мембраны 2 перемещается и освобождает нижнюю пружину 4, несущую контакт 5, размыкая контакты 5 и 6.
Межконтактное расстояние, соответствующее заданной скорости, выставляется установочным винтом 8, опирающимся на верхнюю пружину 7.
В электрическую схему (рис. 15.3) сигнализатора входят: контактная группа Е и искрогасящий контур, состоящий из ёмкости С и сопротивления R.
Рис. 15.1. Сигнализатор скоростного напора ССА-0,27...2,2И
Рис. 15.2. Схема принципиальная сигнализатора скоростного напора ССА-0,27...2,2И.
1—штуцер Д полного давления; 2—мембрана; 3—центр; 4—нижняя пружина; 5 и 6—контакт; 7—верхняя пружина; 8—установочный винт; 9—штуцер С статического давления.
Рис. 15.3. Схема электрическая принципиальная сигнализатора скоростного напора ССА-0,27...2,2И
Е.—контактная группа; С.—конденсатор 0,5 мкф; Ш.—штепсельный разъём; R.—резистор 270 Ом.
Материалы
Орлов Г.В. «МСРП-12-96(-1)-С2 — Система регистрации режимов полёта — Техническое описание» (повествование 16.06.2023).
Источник
https://ussr-cccp.moy.su/index/aviacija_sssr/0-10
Полную версию повествования с таблицами можно увидеть перейдя по ссылке: https://ussr-cccp.moy.su/publ/aviacija_sssr/oborudovanie_samoljotov_sssr/msrp_12_96_1_s2_sistema_registracii_rezhimov_poljota_tekhnicheskoe_opisanie_str_1_obshhie_svedenija/218-1-0-4212