Страницы: [01] [02] [03] [04] [05] [06] [07]
Страна: СССР.
Название: Путь-4МПА.
Тип: ПНС.
Самолёт: Ил-18.
Создан: ?
Завод: ?
Отрасль: Производство авиационной техники.

Повествование
Пилотирование самолёта на маршруте и при заходе на посадку сводится к стабилизации его центра масс на некоторой заданной траектории. К таким траекториям относится равносигнальные зоны курса и глиссады системы посадки, траектории, задаваемые в пространстве с помощью радионавигационных и астроинерциальных систем, а также траектория заданной барометрической высоты.
Трудность пилотирования самолёта по заданной траектории с помощью обычных приборов состоит в том, что для удержания центра масс самолёта на траектории лётчик должен получать информацию от нескольких приборов, мгновенно анализировать эту информацию и, на основании анализа, принимать решение, как управлять самолётом, чтобы его центр тяжести двигался по заданной траектории или выходил из неё оптимальным образом. В этом случае лётчик выполняет роль счётно-решающего устройства по сбору и обработке информации о положении самолёта в пространстве относительно заданной траектории.
Пилотажно-навигационные системы (далее ПНС) или системы директорного управления призваны облегчить пилотирование самолёта при полёте по заданной траектории. В этих системах информация собирается и обрабатывается вычислительным устройством. Обработанная информация выдаётся лётчику в готовом виде, как команды на управление самолётом, т. е. ПНС показывает в каждый момент времени, как надо управлять самолётом для его движения по заданной траектории. В результате пилотирования самолёта с помощью ПНС упрощается и сводится к удержанию командных стрелок в среднем положении.
ПНС имеют два канала — боковой и продольный. Боковой канал служит для управления положением центра масс самолёта в горизонтальной плоскости, а продольный — в вертикальной плоскости. ПНС могут использоваться и как самостоятельные системы, и как составные части систем автоматического управления самолётом. В первом случае лётчик вручную управляет самолётом по командам (δz, δн) ПНС (директорное управление). Во втором случае команды подаются в автопилот и управление самолётом на заданной траектории становиться автоматическим (рис. 1).
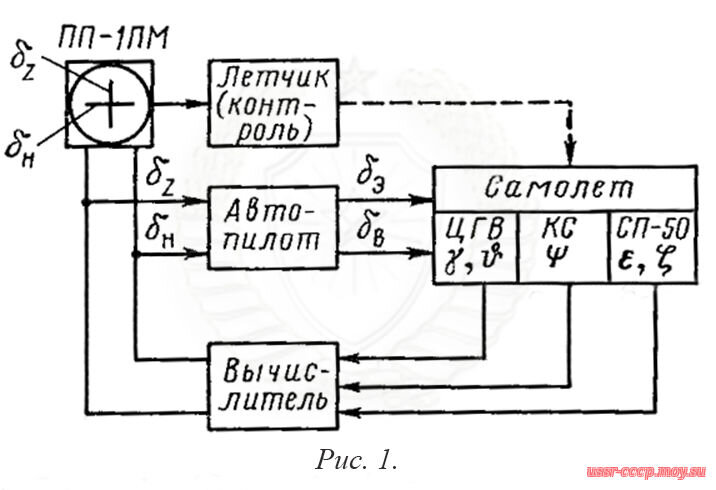
Рис. 1. Структурная схема директорного и автоматического управления
Решаемые задачи.
Система «Путь-4МПА» обеспечивает:
- автоматическое и директорное управление самолётом в режимах «Посадка» (заход на посадку по равносигнальным зонам курса и глиссады радиомаяков СП-50М или ILS, начиная с четвёртого разворота и до высоты 50 м) и «Навигация» (стабилизация на траекториях, задаваемых радиотехническими системами РСБН-2С и VOR);
- совмещённую индикацию основных параметров положения самолёта в пространстве и команд на управление самолётом;
- выдачу информации о неисправности системы «Путь-4МПА», радиотехнических систем навигации и посадки.
Для решения указанных задач система «Путь-4МПА» использует сигналы:
- курсовой системы КС-6, КС-8;
- центральной гировертикали ЦГВ-4;
- радионавигационной системы «Курс МП»;
- радиотехнической системы РСБН-2С;
- радиокомпаса АРК-11.
Комплектность системы «Путь-4МПА»
Основные технические данные
1. Инструментальная точность системы:
- режим посадки боковой канал. Максимальные отклонения самолёта от равносигнальной зоны курсовых маяков СП-50М и ILS при полёте БПРС не превышает ±25 м;
- режим посадки, продольный канал. Максимальное отклонение самолёта от равносигнальной зоны глиссадных маяков при полёте БПРС не превышает 7м выше и 4 м ниже равносигнальной зоны;
- режим навигации. Максимальное отклонение самолёта от траектории задаваемой радиотехническими средствами РСБН-2С И VOR на удалении 280 км от маяка при боковом ветре, соответствующему углу сноса 16°, и ошибке в выставке заданного курса ±2° не превышает ±3 км.
2. При пилотировании самолёта по командным стрелкам система автоматически ограничивает угол крена самолёта до 18,3±3°.
3. Угол подхода к оси ВПП в насыщенной зоне курсового маяка при раннем начале четвёртого разворота составляет 28,5±3°.
4. Погрешности показаний приборов при нормальных климатических условиях (t=25±10°С, Р=750±30 мм рт. ст. и относительной влажности 65±15%):
ПП-1ПМ по шкале крена. . .не более ±1,5° на отметке 0°; ±1,5° на отметках 15°, 30°ПП-1ПМ » » тангажа. . .не более ±1,5° на отметке 0°; ±2° на отметках 10°, 20°НКП-4 » » курса. . .не более ±2°НКП-4 » » заданного курса. . .не более ±1,5°НКП-4 » » КУР. . .не более ±1,5° на отметке 0°; ±2,5°
на всех оцифрованных отметках.
5. Время готовности к работе не более 1 мин.
6. Рабочий диапазон температур от +50 до -60°С.
7. Высотность до 25000 м.
8. Питание от источников:
- постоянного тока 27 В±10%;
- трёхфазного тока 36 В±5% 400 Гц-2%.
9. Потребляемая мощность:
- от сети постоянного тока не более 120 Вт;
- от сети переменного тока не более 200 ВА.
10. Вес комплекта не более 60 кг.
ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ ПО БОКОВОМУ КАНАЛУ
Параметры движения самолёта в горизонтальной плоскости. Рассмотрим взаимосвязь основных параметров движения самолёта в горизонтальной плоскости при заходе на посадку по системе СП-50М (ILS).
Самолёт в горизонтальной плоскости при переходе с одной заданной траектории на другую, как и при стабилизации на ней, управляется с помощью координированных разворотов. При координированном развороте выполняется условие (высотность до 25000 м.):
1а.
которое устанавливает зависимость между линейной и угловой скоростью разворота и креном самолёта. При координированной развороте угловая скорость ω разворота самолёта равна скорости изменения курса ρψ. При малых кренах tg γ≈γ -, тогда
1.
т. е. скорость изменения курса ρψ при координированном развороте всегда пропорциональна крену γ.
Следовательно, наличия крена приводит к изменению курса самолёта, что в сою очередь, приводит к смещению центра масс в горизонтальной плоскости относительно заданной траектории.
Положение самолёта в горизонтальной плоскости относительно траектории посадки (оси ВПП) определяется с помощью курсовой системы КС-6 (КС-8) и радионавигационной системы «Курс МП».
Курсовая система изменяет курс самолёта ψ, который сравнивается с заданным в ручную курса оси ВПП ψз. В результате определяется отклонение ∆ψ продольной оси самолёта от оси ВПП (рис. 2).
Аппаратура «Курс МП» определяет угловое отклонение ε центра масс самолёта от равносигнальной зоны (оси ВПП) относительно курсового маяка КРМ.
Линейное отклонение Z самолёта от оси ВПП можно определить через угловое отклонение ε и дальность D до маяка:
Z=D siu ε.
2а.
Рис. 2. Заход на посадку с помощью ПНС.
При малых углах sin ε≈ε.
Тогда
Z≈Dε.
2.
Так как при выходе самолёта на ось ВПП дальность D изменяется мало, то можно допустить, что линейное отклонение Z пропорционально угловому ε. Производная линейного отклонения ρZ является скоростью приближения (удаления) самолёта к оси ВПП. Продифференцировав уравнение (2) для «Замороженной» дальности, получим
ρZ≈Dρε.
3.
Следовательно, производная углового отклонения ρε пропорциональна скорости приближения (удаления) самолёта к оси ВПП.
В свою очередь, скорость приближения зависит от скорости самолёта V и углах ∆ψ (при скорости и=0).
pZ=V2=V sin ∆ψ
3а.
При малых углах sin ∆ψ≈∆ψ.
Тогда
pZ≈V ∆ψ
4.
Приравняв правые части (3 и 4) и продифференцировав их, получим
Принцип действия
Для вывода самолёта по оптимальной траектории на ось ВПП и стабилизации его на сигналы, пропорциональные отклонения ∆ψ и ε, подаются в вычислитель В-12 системы «Путь-4МПА». В вычислителе В-12 из этих сигналов формируется сигнал заданного крена γз, т. е. того крена, который должен иметь самолёт исходя от отклонений ∆ψ и ε, чтобы с разворотом выводить на ось ВПП по оптимальной траектории. Вычислительный заданный крен γз сравнивается в усилителе У-20Н с истинным креном самолёта γ. Если истинный крен не равен заданному, то возникает команда по крену -δz=γ±γз, которая индицируется на пилотажном приборе ПП-1ПМ. Выполняя команду, лётчик задаёт самолёту крен, равный заданному γз. Командная стрелка прибора ПП-1ПМ устанавливается в нулевое положение, а самолёт движется по оптимальной траектории выхода на ось ВПП. По мере приближения к оси ВПП отклонение ∆ψ и ε уменьшаются, что приводит к уменьшению заданного крена γз. При этом истинный крен γ становиться больше заданного γз и возникает команда δz обратного знака, выполняя которую лётчик уменьшает крен самолёта. Так по мере приближения к оси ВПП самолёт выходит из крена. После выхода самолёта на ось ВПП с помощью команд происходит стабилизация центра масс самолёта на этой оси.
Таким образом, в вычислителе В-12 системы «Путь-4МПА» в любом положении самолёта вычисляется оптимальная траектория выхода его ось ВПП. Оптимальная траектория вычисляется в виде заданного крена, и лётчику в каждый момент времени указывается, как надо управлять самолётом, чтобы его центр масс двигался по вычислительной траектории.
Анализ закона управления
Как отмечалось, сигнал команды по крену δz формируется путём сравнения сигналов заданного γз и истинного крена γ:
δz=t(γ ± γз),
5.
где t — коэффициент пропорциональности.
Сигнал истинного крена γ снимается с ЦГВ-4. Сигнал заданного крена формируется в вычислителе В-12 путём алгебраического сложения сигналов ε, ρε, ∆ψ, ρψ с нужными порциями.
Сигнал ε поступает с аппаратуры «Курс МП» и является основным сигналом, указавающим положение центра масс самолёта относительно заданной траектории (оси ВПП). Полярность его зависит от направления, а величина — от величины углового отклонения самолёта от оси ВПП (рис. 3).
Рис. 3. Движение самолёта при пропорциональном управлении
При плоскопараллельном уходе самолёта с оси ВПП для его возвращения на неё необходимо задать самолёту крен в сторону оси ВПП тем больший, чем больше отклонение ε. Следовательно, заданный крен γз должен быть пропорциональным отклонению самолёта от оси ВПП , т. е.
γε=Rεε,
Где Rε — коэффициент пропорциональности.
если сигнал заданного крена γз будет формироваться только из сигнала ε, то будет осуществляться пропорциональное управление, которое имеет следующие недостатки:
недостаточная жёсткость стабилизации самолёта на заданной траектории, так как команда возникает после значительного отклонения;
выход самолёта на заданную траекторию всегда сопровождается затухающими колебаниями относительно неё.
Для устранения этих недостатков при формировании заданного крена, кроме сигнала ε, используется его производная рε.
В этом случае заданный крен
γε=Rεε+Rрεрε,
где Rрε — коэффициент пропорциональности (необходимая порция).
Сигнал рε пропорционален скорости удаления (приближения) самолёта к оси ВПП и опережает основной сигнал ε. Сигнал рε возникает при перемещении самолёта в секторе курса КРМ. При выходе самолёта за сектор курса сигнал рε равен нулю.
С удаление от оси ВПП знак рε совпадает со знаком основного сигнала ε, а при приближении — противоположен ему (рис. 4).
Если под действием возмущения самолёт начинает плоскопараллельно удаляется от оси ВПП, то возникающие сигналы ε и рε будут одного знака. В результате сигнал заданного крена γз формируется раньше, а следовательно, раньше будет выдаваться лётчику команда по крену δz, выполняя которую лётчик накреняя самолёт в сторону возмущения. Возникающая при этом боковая сила компенсирует возмущение и отклонение самолёта от оси будет меньшим.
Рис. 4. Уравнение с использованием производной
Следовательно, использование производной рε для формирования γз приводит к тому, что команда по крену δz выдаётся лётчику с упреждением, а это способствует более жёсткой стабилизации самолёта на заданной траектории (оси ВПП).
Если под действием больших кратковременных возмущений произойдёт плоскопараллельное отклонение от оси ВПП, то из сигналов ε и рε сформируется заданный крен γз и команда по крену δz, после выполнения которой самолёт начинает разворачиваться в сторону оси ВПП и приближаться к ней. При этом возникает производная рε обратного знака, которая будет вычитаться из основного сигнала ε.
С приближением к оси ВПП сигнал ε уменьшается и в какой-то точке 1 станет равным по абсолютному значению сигналу производной рε. Произойдёт компенсация этих сигналов. Сигнал заданного крена γз будет равен нулю
(γз=R ε ε—Rрε рε).
В точке 1 лётчику выдаётся команда на вывод самолёта из крена. Так как за время разворота самолёт занял положение под углом к оси ВПП, то он с нулевым креном продолжает приближаться к ней. Сигнал ε уменьшается и сигнал рε становится больше сигнала ε. Возникает заданный крен γз и команда по крену δz обратного знака, выполняя которую лётчик до выхода самолёта на ось ВПП создаёт необходимый крен в противоположную сторону и самолёт плавно вписывается в линию оси ВПП.
Сигнал ε, поступающий с аппаратуры «Курс МП», содержит в своём составе сигналы помех (за счёт радиопомех). При дифференцировании сигнала ε эти помехи возрастают, поэтому в сигнале рε уровень помех увеличивается.
Помехи приводят к колебаниям стрелки командного прибора, что затрудняет, а в ряде случаев делает невозможным пилотирование самолёта.
Для уменьшения помех сигнала ε и рε применяют фильтры, в качестве которых используются апериодические (инерционные) звенья:
Фильтры такого типа хорошо пропускают постоянные или медленно изменяющиеся во времени полезные сигналы и плохо — быстроменяющиеся сигналы помех. Подавление помех или снижение их уровня тем лучше, чем больше постоянная времени звена Т, но в этом случае будут запаздывать и полезные сигналы. Так как уровень помех в сигнале рε во много раз больше, чем в сигнале ε, то по сигналу рε вводится дополнительный фильтр.
Наличие фильтров в составе вычислителя приводит к запаздыванию сигнала γз, а следовательно, и команды δz, что приводит искажению траектории следования на ось ВПП. При этом самолёт на ось ВПП выводится не по оптимальной траектории. Для устранения этого недостатка в вычислитель подаются сигналы, компенсирующие запаздывание.
Рис. 5. Выполнение четвёртого разворота
Таким компенсирующим сигналом может быть сигнал γ или эквивалентный ему сигнал рψ (1). Лучше подавать сигнал рψ, так как при подаче сигнала крена могут возникать статические ошибки, вызываемые неточной установкой ЦГВ-4. В этом случае при нулевом крене с ЦГВ-4 снимается ложный сигнал, для компенсации которого необходим сигнал ε. Самолёт будет двигаться параллельно заданной траектории.
Таким образом, при использовании компенсирующего сигнала рψ заданный крен будет определяться
γз=Rε ε+Rрε рε+Rрψ рψ,
где Rрψ — коэффициент пропорциональности.
Сигнал ∆ψ, пропорциональный отклонению продольной оси самолёта от оси ВПП (заданной траектории), используется при формировании γз для выхода самолёта с точки четвёртого разворота на ось ВПП. Тогда
γз=Rε ε+Rрε рε+Rрψ рψ,+R∆ψ ∆ψ,.
В точке 1 четвёртого разворота самолёт ещё находится за пределами сектора курса (но в секторе излучения), поэтому сигнал ε максимальный и не изменяется, в результате его производная рε равна нулю. Сигнал ∆ψ на четвёртом развороте имеет большую величину так как отклонение самолёта от оси ВПП составляет 90°. Сигнал рψ=0, так как в точке четвёртого разворота курс самолёта не меняется (рис. 5).
Если на четвёртом развороте (в точке 1) сигнал γз будет формироваться только из сигнала ε имеет такой знак, что лётчику будет выдаваться команда делать крен от ВПП. После выполнения такой команды самолёт будет разворачиваться в противоположную от ВПП сторону (пунктир).
Рис. 6. Полёт с боковым ветром
Для создания на четвёртом развороте (в точке 1) крена в сторону ВПП сигнал γз формируется путём вычитания из сигнала ε большего сигнала ∆ψ. При этом заданный крен γз и команда δz будут нужного знака.
После выполнения команды самолёт, начиная от точки 1 будет разворачиваться в сторону ВПП. При этом отклонение от заданного будет уменьшаться и при угле отклонения, близко к 28°,5, сигнал ∆ψ по абсолютному значению станет равным ограниченному сигналу ε и они скомпенсируют друг друга. Сигнал заданного крена γз будет равен нулю и в точке 2 лётчику выдаётся команда, после выполнения которой самолёт выравнивается из крена и под углом 28°,5 к оси ВПП продолжает приближаться к ней. Угол 28°,5 называется углом прохода самолёта к оси ВПП. В точке 3 самолёт входит в сектор курса и возникает сигнал производной рε, за счёт которого формируется сигнал заданного крена γз. Возникает команда δz на крен от оси ВПП. После выполнения команды самолёт по оптимальной траектории выходит на ось ВПП. В момент выхода самолёта на ось ВПП сигналы ε, рε, рψ, ∆ψ будут равны нулю.
При заходе на посадку с боковым ветром самолёт плоскопараллельно отклоняется от оси ВПП (рис.6). За счёт возникших сигналов ε и рε лётчику выдаётся команда, после выполнения которой самолёт разворачивается в сторону оси ВПП. Возникает отклонение от заданного курса ∆ψ. При отклонении ∆ψ, равном углу сноса УС, самолёт прекратит отклонение от оси ВПП. Сигнал рε=0, а сигнал ε скомпенсирован сигналом ∆ψ, так как они противоположного знака. В этом случае γз=0 и лётчику выдаётся команда на вывод самолёта из крена, хотя самолёт и не вышел ещё на ось ВПП.
В дальнейшем центр масс самолёта будет двигаться параллельно оси ВПП, т. е. возникает статическая ошибка стабилизации центра масс самолёта относительно оси ВПП, которая всегда пропорциональна боковой составляющей скорости ветра.
После окончания переходного процесса центра масс самолёта будет двигаться по оси ВПП, а его продольная ось будет отклонена от оси ВПП (заданного курса) на угол ∆ψ=УС. Вектор путевой скорости W совпадает при этом с осью ВПП.
Таким образом, для устранения статических ошибок сигнал ∆ψ имеет зону нечувствительности в пределах ±28°,5. При этом закон формирования заданного крена γз в общем виде будет иметь следующее выражение:
γз=Rε ε+Rрε рε+Rрψ рψ,+F∆ψR∆ψ ∆ψ,.
Чтобы самолёт при заходе на посадку не сделал крен больше допустимого, заданный крен γз ограничивается в пределах ±18°,5 ограничителем F.
Для обеспечение угла подхода самолёта ±28°,5 сигнал ε ограничивается в диапазоне ±2°,2.
Учитывая передаточные функции звеньев (фильтров) вычислителя, заданный крен определяется
6.
Зона нечувствительности по сигналу ∆ψ образуется путём вычитания двух одинаковыв сигналов ∆ψ, один из которых ограничивается на ограничителе F ε, ∆ψ.
Рис. 7. Структурная схема бокового канала (левый полукомплект).
Закон управления бокового канала в режиме «Посадка» имеет следующие выражение:
7.
В режиме «Навигация» закон управления имеет вид:
8.
?де УС — угол сноса самолёта; Rус — коэффициент передачи угла сноса.
В режиме «Навигация» (VOR, СРП, азимут) так же, как и в режиме «Посадка», основным сигналом для формирования команды δz является сигнал ε отклонение от заданной линии пути, выдаваемой аппаратурой «Курс МП». Сигнал ∆ψ в этом режиме используется вместо эквивалентного ему сигнала рε (3, 4). Сигнал угла сноса УС, выдаваемый системой НАС-1А6К, используется для коррекции, так как наличие сигнала ∆ψ в законе управления вызывает возникновение статических ошибок при боковом ветре.
Структурная схема формирования закона управления
Структурная схема бокового канала (левый полукомплект) представлена на (рис. 7). Сигнал ε отклонения самолёта от равносигнальной зоны курса (оси ВПП) поступает с аппаратуры «Курс МП» (РСБН-2С) в комбинированный блок БК-5, где производится его линейное усиление. С выхода блока БК-5 сигнал ε попадает на левый и правый вычислители В-12 и автопилот АП-6Е или АП-6ЕМ-ЗП.
Сигнал курса самолёта ψ поступает от курсовой системы КС-6 (КС-8) и попадает в прибор НКП-4, в котором он сравнивается с установленным вручную заданным курсом ψз. В результате сравнения образуется сигнал, пропорциональный отклонению самолёта от заданного курса (∆ψ1=ψз±ψ).
При ∆ψ>28°,5 с ограничителя на 4-ый блок поступает неизменный сигнал ∆ψ2, а сигнал ∆ψ1, поступающий непосредственно на 4-ый блок, будет увеличиваться вплоть до ∆ψ=90°.
В результате больших отклонениях (∆ψ>28°,5) сигнал ∆ψ поступает на 4-ый блок В-12, что обеспечивает выполнение четвёртого разворота по стрелке командного прибора. При малых отклонениях (∆ψ>28°,5) сигнал ∆ψ на 4-ый блок не подаётся и за счёт этого обеспечивается устранение статической ошибки. вызванной боковым ветром.
На 4-ом блоке путём алгебраического суммирования сигналов ε, рε, рψ и ∆ψ формируется сигнал заданного крена γз.
После ограничения на ограничителе F в пределах ±18°,5 сигнал γз подаётся на вход 5-го канала усилителя У-20Н, где он сравнивается с сигналом текущего (истинного) крена γ, поступающего с ЦГВ-4 через блок БК-5. Разность сигналов γз и γ как сигнал команды по крену δz с выхода 5-го канала У-20Н подаётся в пилотажный прибор ПП-1ПМ для отклонения вертикальной стрелки командного прибора.
При автоматическом управлении сигнал заданного крена γз постоянного тока после ограничения подаётся также в блок связи БС-3, где преобразуется в сигнал переменного тока, который подаётся в боковой канал автопилотов АП-6Е или АП-6ЕМ-ЗП.
ПРИНЦИП ДЕЙСТВИЯ СИСТЕМЫ ПО ПРОДОЛЬНОМУ КАНАЛУ
Параметры движения самолёта в вертикальной плоскости.
Построение структурной схемы управления самолётом, а также принцип использования системы для продольного канала остаются такими же, как и для бокового канала. Однако специфика движения самолёта в вертикальной плоскости накладывает свои особенности на выбор закона управления.
Стабилизация самолёта на глиссаде или заданной высоте производится за счёт изменения подъёмной силы, управляющей вес самолёта. Подъёмная сила Y (1) зависит, в свою очередь, помимо массовой плотности ρ и площади несущих поверхностей S, от воздушной скорости V и угла атаки а. При увеличении или уменьшении их в определённых пределах будет соответственно увеличиваться или уменьшаться подъёмная сила самолёта Y. При этом нарушается равенство между подъёмной силой Y и весом самолёта G и он будет отклоняться вверх или вниз от заданной траектории.
При постоянной воздушной скорости самолёта для снижения и набора высоты по траектории, наклонённый к горизонту под каким-то углом, необходимо, чтобы самолёт определённый угол атаки (рис. 8).
Так как на самолёте до последнего времени не было измерителей угла атаки а, а есть измерители угла тангажа ϑ, то угол атаки определяется из соотношения ϑ=θ±а.
Для удержания самолёта на заданной траектории в вертикальной плоскости лётчик контролирует угол тангажа (атаки) самолёта.
Рис. 8. Движение самолёта по глиссаде.
Рис. 9. Движение самолёта на глиссаде.
С помощью аппаратуры «Курс МП» определяется отклонение ξ центра масс самолёта от глиссады (рис. 9) отклонение Н центра масс самолёта от глиссады может через угловое ξ и дальность D:
H=D sin ξ.
Учитывая малые угловые отклонения самолёта от глиссады, можно записать
H≈Dξ.
9.
Изменение линейного отклонения H во времени является скоростью приближения (удаления) самолёта к глиссаде. Продифференцировав уравнение (9) для «Замороженной» дальности, получим
рН=Е рξ.
10.
Следовательно, скорость приближения (удаления) самолёта к глиссаде пропорциональна к производной рξ сигнала ξ снимаемого с аппаратуры «Курс МП».
Скорость сближения к глиссаде рН можно определить также из зависимости (см. рис. 9):
рН=V2=Vо sin ϑ.
Скорость сближения к глиссаде рН можно определить также из зависимости (см. рис. 9):
рН=V2=Vо sin ϑ.
Так как углы ϑ не превышают 10°, то sin ϑ≈ϑ и можно записать
рН≈V0ϑ.
11.
следовательно, скорость приближения к глиссаде рН пропорциональна углу ϑ тангажа самолёта.
Приравняв правые части (уравнений 10 и 11), получим
12.
Следовательно, производная рξ пропорциональна тангажу ϑ.
Анализ закона управления.
Для вывода самолёта на глиссаду и стабилизации его на ней лётчик использует показания авиагоризонта, нуль-прибора системы инструментальной посадки, указателя скорости и высотомера. На основании информации, получаемой от этих приборов, лётчик управляет тангажом самолёта так, чтобы его центр масс двигался по глиссаде. Такое управление требует от лётчика большого напряжения. Использование вычислителя позволяет упростить управление.
Простейшая операция, которую должен выполнять вычислитель, — это сравнение сигналов тангажа ϑ и сигналов отклонения Н от глиссады.
Предположим, под действием возмущения самолёт отклонился вверх от глиссады на величину Н (рис. 9). В этом случае лётчик должен изменить тангаж самолёта в сторону пикирования и самолёт будет приближаться к глиссаде. По мере приближения к ней отклонение Н уменьшается, а следовательно, надо уменьшать и угол тангажа ϑ для уменьшения скорости приближения к глиссаде и этим предотвратить отклонение от неё вниз.
Таким образом, каждому отклонению Н соответствует определённое значение угла тангажа ϑ.
Рис. 10. Структурная схема управления продольного канала.
Операцию сравнения отклонения Н и тангажа ϑ происходит вычислитель и при несоответствии их лётчику выдаётся команда δн на изменение тангажа в ту или другую сторону.
Структурная схема такого управления показана на (рис. 10), а закон управления будет выражаться зависимостью
δн=Rϑϑ±RнН,
где Rϑ, Rн — коэффициенты пропорциональности.
Заменив линейное отклонение Н на угловое ξ (уравнение 9), получим простейший закон управления:
δн=Rϑϑ±Rξξ,
13.
Однако реализация приведённого закона управления, в котором используется сигнал тангажа ϑ, приводит к возникновению статических ошибок и колебаниям самолёта относительно глиссады. Поэтому для устранения статических ошибок сигнал тангажа в законе (13) заменяется на эквивалентный сигнал производной рξ (уравнение 12), а для устранения колебаний самолёта относительно глиссады вводится сигнал производной тангажа рϑ. Тогда закон управления продольного канала в общем виде будет иметь вид:
δн=t(Rξξ+Rрξрξ+Rрϑрϑ).
14.
Учитывая передаточные функции фильтров-усилителей, применяемых в продольном канале, закон уравнения будет иметь вид:
15.
Структурная схема формирования закона управления продольного канала представлена на (рис. 11).
Рис. 11. Структурная схема продольного канала системы «Путь-4МПА».
Рис. 12 Структурная схема системы «Путь-4МПА».
Сигнал рξ через 1-ый блок, являющийся фильтром-усилителем. также подаётся на 2-ой блок.
На 2-ом блоке вычислителя В-12 путём алгебраического суммирования сигналов ξ, рξ, рϑ формируется сигнал команды по тангажу δн, который после усиления в усилителе У-20Р (6-ой канал) подаётся на прибор ПП-1ПМ для индикации.
При автоматическом полёте по глиссаде сигнал команды δн через блок БС-3 подаётся в продольный канал автопилота АП-6Е или АП-6ЕМ-ЗП.
Структурная схема системы «Путь-4МПА» показана на (рис. 12).
ПОКАЗЫВАЮЩИЕ ПРИБОРЫ ПП-1ПМ И НКП-4
Пилотажный прибор ПП-1ПМ
Пилотажный прибор ПП-1ПМ (см. рис. 13) предназначен для индикации команд директорного управления самолётом.
Прибор ПП-1ПМ комбинированный, совмещает в себе:
- командный нуль-прибор,
- дистанционный указатель авиагоризонта,
- указатель положения глиссады (заданной траектории снижения)
- указатель скольжения.
.
Рис. 13а. Лицевая часть - пилотажного прибора ПП-1ПМ.
1—стрелка указателя глиссады; 2—шкала из точек; 3—индекс; 4—сферическая шкала тангажа; 6—силуэт-самолётика; 7—шкала кренов; 8—указатель скольжения; 9—кнопка арритирования; 10—кремальера; 11—лампа; 12—горизонтальная командная стрелка.
И н д и к а ц и я п а р а м е т р о в. Отклонение вертикальной командной стрелки 5 относительно центрального чёрного кружка влево или вправо является командой лётчику соответственно на левый или правый крен. Отклонение горизонтальной командной стрелки 12 относительно центрального чёрного кружка вверх или вниз является командой лётчику на изменение угла тангажа самолёта соответственно на кабрирование или пикирование. Угол крена самолёта отсчитывается по указателю крена (силуэта-самолётика) 6 на шкале кренов 7 самолёта.
Угол тангажа самолёта отсчитывается на сферической шкале тангажа 4 относительно индексов 3.
Шкала тангажа имеет искусственную линию горизонта и отметки углов тангажа.
Выше линии искусственного горизонта шкала окрашена в голубой или белый цвет, а ниже — коричневый или чёрный (ПП-1ПМ или ПП-1ПМк) цвет.
Вращение сферической шкалы тангажа 4 относительно индексов 3 указывает изменение углов тангажа на кабрирование или пикирование. При кабрировании линия искусственного горизонта оказывается ниже силуэта-самолётика, и он виден на голубом (белом) фоне. При пикировании силуэт-самолётика виден на коричневом (чёрном) фоне. Стрелка 1 указателя глиссады отклоняется вверх или вниз от средней (нулевой) отметки шкалы из точек 2. Направление отклонения стрелки 1 от среднего положения указывает лётчику, в какой стороне относительно самолёта находится глиссада планирования. Среднее положение стрелки указывает, что самолёт находится на глиссаде планирования.
Указатель скольжения 8 позволяет выполнять развороты самолёта без скольжения. Смещение чёрного шарика от среднего положения при развороте самолёта указывает на наличие внутреннего или внешнего скольжения. Кнопка 9 служит для дистанционного арритирования ЦГВ-4. Лампа 11 сигнализирует, к какому полукомплекту системы подключён автопилот АП-6Е или АП-6ЕМ-ЗП. Кремальера 10 служит для установки начальных углов тангажа.
Рис. 13б. Кинематическая схема - пилотажного прибора ПП-1ПМ.
1—командная стрелка; 2—командная стрелка; 3—силуэт-самолётика; 4—стрелка глиссады; 5—шкала тангажа; 7—двигатель (М1); 8—потенциометр (R1); 9—потенциометр (R4); 10—двигатель (М3); 12—потенциометр (R3); 13—двигатель (М5); 15—генератор (М6): 16—двигатель (М4); 18—потенциометр (R2); 20—двигатель (М2); 23—потенциометр (R6).
Кинематическая схема - пилотажного прибора ПП-1ПМ (см. рис. 13б) состоит из следующих узлов:
- система индикации команды по крену, в которую входят двигатель 10 (М3), потенциометр 12 (R3) и командная стрелка 1;
- система индикации команды по тангажу, в которую входят двигатель 20 (М2), потенциометр 18 (R2) и командная стрелка 2;
- системы индикации угла крена самолёта, в которую входят двигатель 13 (М5), генератор 15 (М6), потенциометр 23 (R6) и силуэт-самолётика 3;
- системы индикации угла тангажа самолёта, в которую входят двигатель 16 (М4), потенциометр 9 (R4) и шкала тангажа 5;
- системы индикации отклонения от глиссады, в которую входят двигатель 7 (М1), потенциометр 8 (R1) и стрелка глиссады 4.
Указанные узлы состоят из однотипных элементов:
- двигателя ДИД-0,5У;
- редуктора;
- потенциометра;
- указателя (шкалы или стрелки).
Навигационный курсовой прибор НКП-4
НКП-4 предназначен для индикации положения самолёта в пространстве и формирования сигналов отклонения от заданного курса ∆ψ (рис. 14а). Прибор НКП-4 комбинированный и обеспечивает индикацию:
- текущего курса ψ самолёта;
- заданного курса ψз;
- курсового угла радиостанции φ;
- отклонение ε самолёта от равносигнальной зоны курса или заданной линии пути;
- отклонение ξ самолёта от глиссады или заданной траектории снижения.
Бленкеры прибора сигнализируют об исправности каналов курса и глиссады радиотехнических средств посадки и навигации.
Рис. 14а. Лицевая часть - Навигационного курсового прибор НКП-4.
2—стрелка заданного курса; 3—индекс; 4—шкала курсов; 5—стрелка курсового угла: 6—бленкер; 7—шкала отклонения; 8—индекс треугольный; 9—кремальера; 10, 14—шкала из точек; 11—стрелка заданной линии пути; 12—глиссада; 13—стрелка глиссады;
И н д и к а ц и я п а р а м е т р о в. Курс самолёта отсчитывается на шкале курса 4 относительно неподвижного треугольного индекса 3. Заданный курс отсчитывается на шкале курса 4 по стрелке 2 заданного курса. При полёте самолёта с заданным курсом стрелка 2 устанавливается против индекса 3. С разворотом самолёта вправо шкала курсов 4 разворачивается влево относительно индекса 3 и на оборот. Стрелка 2 заданного курса при этом разворачивается синхронно со шкалой курсов 4. Смещение стрелки 2 заданного курса относительно индекса 3 по шкале 7 указывает на отклонение самолёта от заданного курса самолёта.
Линия 0—180° шкалы курсов 4 имитирует магнитный (истинный) меридиан, а линия проходящая через верхний и нижний треугольные индексы, имитируют продольную ось самолёта. Курсовой угол радиостанции отсчитывается по стрелке 5 на шкале 7, магнитный пеленг — на шкале 4 по стрелке 5.
Положение самолёта относительно равносигнальной зоны курса или заданной линии пути (ЗЛП) указывается стрелкой 11 по шкале из точек 10. Среднее положение стрелки 11 указывает, что самолёт находится на заданной траектории. Отклонение стрелки 11 от среднего положения влево или вправо указывает лётчику, в какой стороне относительно самолёта находится заданная траектория.
Положение самолёта относительно глиссады указывает стрелка 13 по шкале из точек 14. Отклонение стрелки 13 от среднего положения указывает лётчику сторону нахождения глиссады.
Открытие бленкера 6 курса (глиссады 12) в зоне действия курсового (глиссадного) маяка сигнализирует об отказе канала курса (глиссады) радиотехнических средств навигации и посадки. Кремальера 9 служит для установки заданного курса.
Треугольные индексы 8 служа для удобства выполнения предпосадочного манёвра.
Рис. 14б. Кинематическая схема - Навигационного курсового прибор НКП-4.
1—сигнализации исправности канала глиссады РТС; 2—сигнализация исправности канала курса РТС; 3—указателя отклонения от равносигнальной зоны курса (Э1); 4—стрелка; 5—шкала; 6—стрелка заданного курса; 7—указателя отклонения от глиссады (Э2); 8—шкала курса; 9—двигатель (М5); 11—сельсин (М6); 14—сельсин (М4); 16—двигатель (М3); 17—дифференциал; 19—двигатель (М1); 21—сельсин (М2);
Прибор НКП-4 (см. рис. 14б) состоит из следующих узлов:
- следящей системы курса, в которую входят двигатель 19 (М1), сельсин 21 (М12) и шкала курса 8;
- следящей системы заданного курса, в которую входят двигатель 16 (М3), сельсин 14 (М4) и стрелка заданного курса 6;
- следящей системы курсовых углов радиостанции, в которую входят двигатель 9 (М5), сельсин 11 (М6), стрелка 4 и шкала 5;
- магнитоэлектрической системы 3 (Э1) — указателя отклонения от равносигнальной зоны курса;
- магнитоэлектрической системы 7 (Э2) — указателя отклонения от глиссады;
- магнитоэлектрической системы 2 сигнализации исправности канала курса РТС;
- магнитоэлектрической системы 1 сигнализации исправности канала глиссады РТС.
В приборе НКП-4 в следящих системах используется двигатели-генераторы ДГ-0,5ТА. Дифференциал служит для сложения углов ψз и ψ.
ЭЛЕКТРИЧЕСКАЯ СХЕМА ПИЛОТАЖНО_НАВИГАЦИОННОЙ СИСТЕМЫ «ПУТЬ-4МПА»
Электрическая схема системы приведена в приложении 1.
Следящая система индикации крена
Следящая система индикации крена состоит из:
- потенциометра крена ЦГВ-4;
- потенциометра R6;
- двигателя М5 (ДИД-0,5У);
- двигателя М6 (ДИД-0,5У);
- силуэта-самолётика и шкалы кренов прибора ПП-1ПМ, а также 8-го канала усиления У-20Н.
При кренах самолёта между потенциометрами ЦГВ-4 и R6 возникает сигнал рассогласования, который снимается с R6 и после усиления в 8-ом канале подаётся на двигатель М5. Двигатель через редуктор поворачивает силуэт-самолётика прибора ПП-1ПМ и и одновременно потенциометра R6, согласуя следящую систему. После её согласования двигатель М5 останавливается, а против нижней плоскости силуэта-самолётика на шкале кренов прибора ПП-1ПМ отсчитывается угол крена.
С осью двигателя М5 связана ось двигателя М6, работающего в режиме тахогенератора. Сигнал, пропорциональной скорости вращения двигателя, с управляющей обмотки М6 подаётся в восьмой канал У-20Н, как скоростная обратная связь. Резисторы R20—R22 служат для согласования потенциометров ЦГВ-4 и R6.
Сигнал крена с потенциометра ЦГВ-4 одновременно подаётся в блок реле БР-46А на мост, состоящий из резисторов R37, R41. Со средних точек моста сигнала крена γ через резисторы R42, R43 подаётся на вход 5-го канала У-20Н для формирования команды по крену δz.
Следящая система индикации тангажа
Следящая система индикации тангажа состоит из:
- потенциометра тангажа ЦГВ-4;
- потенциометра R4;
- двигателя М4 (ДИД-0,5У);
- сферической шкалы тангажа прибора ПП-1ПМ и 9-го канала усиления У-20Н.
При изменении тангажа самолёта между потенциометрами ЦГВ-4 и R4 возникает рассогласование. Сигнал рассогласования с потенциометрами R4 через резисторы R35, R36 (БР-46А) подаётся на вход 9-го канала У-20Н и после усиления поступает на двигатель М4, который через редуктор поворачивает шкалу тангажа и потенциометр R4, согласуя следящую систему. После её согласования двигатель останавливается, а на шкале тангажа относительно центральных индексов отсчитывается угол тангажа. Резисторы R14—R16 служат для согласования потенциометров ЦГВ-4 и R4.
Одновременно сигнал танга ϑ с потенциометрами ЦГВ-4 подаётся в блок реле БР-46А на мост, состоящий из резисторов R44—R48. Со средних точек моста сигнал тангажа ϑ через резисторы R49, R50 подаётся на вход 1-го канала усиления блока БК-5. После усиления сигнал поступает в вычислитель В-12 для формирования сигнала команды по тангажу δн.
Установка начальных углов тангажа (углов атаки) в пределах ±10° производится кремальерой, кинематически связанной щётками потенциометра R4. При повороте щёток потенциометра происходит рассогласования следящей системы. После её согласования линия горизонта шкалы тангажа занимает новое положение.
Следящая система индикации курса
Следящая система индикации курса состоит из:
- сельсина-датчика УШ (КС-6, КС-8);
- сельсина-приёмника М-2 (С-30ВП);
- двигателя-генератора М1 (ДГ-0,5ТА);
- подвижная шкала курсов прибора НКП-4;
- 3-го канала усиления У-20Н.
Рис. 15. Система формирования сигнала ∆ψ в НКП-4.
При изменении курса самолёта между сельсинами УШ и М2 возникает рассогласование. Сигнал рассогласования с ротора сельсина М2 после усиления в 3-ем канале У-20Н подаётся на двигатель М1, который через редуктор поворачивает шкалу курсов, ротор сельсина М2 и первую входную ось механического дифференциала d (рис. 15). После согласования следящей системы шкала НКП-4 и первая входная ось механического дифференциала будут повёрнуты на угол курса самолёта ψ.
Для осуществления скоростной обратной связи сигнал, пропорциональной скорости вращения двигателя М1, с тахогенератора этого двигателя суммируется в противофазе на входе 3-го канала У-20Н с сигналом рассогласования следящей системы.
Сигнал ∆ψ формируется в приборе НКП-4. Следящая система заданного курса (СД, М4, М3, 2-ой канал) не задействована (см. рис. 15). Заданный курс ψз устанавливается в приборе НКП-4 кремальерой ЗК вручную. Вращение кремальеры ЗК передаётся на вторую ось дифференциала d и через него на стрелку заданного курса (ЗК). Вводимый заданный курс ψз устанавливается по стрелке ЗК на подвижной шкале курсов НКП-4. Если после установки заданного курса самолёт изменяет курс, то работает следящая система курса и двигатель М1 поворачивает шкалу курсов и через дифференциал стрелку ЗК на один и тот же угол, обеспечивая этим их синхронное перемещение.
Так как первая входная ось дифференциала d поворачивается на угол курса ψ, а вторая входная ось — на угол ψз, то выходная ось его поворачивается на угол, равный алгебраической сумме углов ψ и ψз, т. е. с помощью дифференциала d решается уравнение
∆ψ=ψз±ψ.
Так как с выходной осью дифференциала связаны щётки потенциометра R1, то с него через резисторы R2, R4 снимается и подаётся в вычислитель В-12 сигнал постоянного тока ∆ψ, пропорциональный углу отклонения самолёта от заданного курса.
Сигналы ∆ψ, сформированные на потенциометрах R1 левого и правого приборов НКП-4, подаётся на блоки 3 и 4 левого и правого вычислителя В-12.
Для увеличения надёжности системы потенциометры R1 левого и правого приборов НКП-4 соединены параллельно через клеммы соединительной коробки.
Следящая система индикации КУР
Следящая система индикации КУР состоит из:
- сельсина-датчика (А-8) радиокомпаса АРК-11;
- сельсина-приёмника М6 (С-30ВП);
- двигателя-генератора М5 (ДГ-0,5ТА);
- стрелки и шкалы КУР прибора НКП-4;
- 4-ый канал усиления У-20Н.
При изменении КУР между сельсинами А-8 и М6 возникает рассогласование. Сигнал рассогласования с ротора сельсина М6 после усиления в 4-ом канале У-20Н подаётся на двигатель М5, который через редуктор поворачивает стрелку КУР и ротор сельсина М6, согласуя следящую систему. После её согласования двигатель М5 останавливается, а а по стрелке на внешней неподвижной шкале прибора НКП отсчитывается КУР.
Сигнал с тахогенератора двигателя М5 обеспечивает скоростную обратную связь. Следящая система КУР включается при включении радиокомпаса АРК-11 напряжением 45 В 400 Гц. Для гашения напряжения до 36 В и для сдвига фаз применяется резистор R28 и конденсатор С9, расположенные в блоке БР-46А.
Прохождение сигналов ε и ξ от радиотехнических средств
Как уже отмечалось датчиками сигналов ε и ξ отклонения самолёта от заданных траекторий являются радиоприёмные устройства аппаратуры «Курс МП» или РСБН-2С («Свод»).
Сигналы ε и ξ от радиотехнических датчиков поступают:
на приборы НКП-4 и ПП-1ПМ для индикации положения самолёта относительно заданных траекторий;
в комбинированный блок БК-5 для линейного усиления. С выхода блока БК-5 сигналы подаются в оба вычислителя В-12 и автопилот АП-6Е или АП-6ЕМ-ЗП.
В систему «Путь-4МПА» сигналы ε и ξ могут поступать первого или второго полукомплекта аппаратуры «Курс МП», а также от аппаратуры РСБН-2С в зависимости от того, в каком положении находится переключатель селектора радиосредств (см. рис. 15а).
Рис. 15а. Передняя панель селектора радиосистемы
1—переключатель системы посадки СП-50М, ILS или VOR; 2—переключатель маркерного приёмника; 3—переключатель режимов.
В положении 1 оба прибора НКП-4 и ПП-1ПМ, и блок БК-5 подключается к первому полукомплекту «Курс МП», работающему в одном из режимов «СП-50», «ILS», «VOR».
В положении Совм. оба прибора ПП-1ПМ, левый НКП-4 и блок БК-5 подключается к первому, а правый НКП-4 — к второму полукомплекту «Курс МП».
В положении 2 оба прибора ПП-1ПМ, левый НКП-4 и блок БК-5 подключается к второму полукомплекту «Курс МП».
В положении РСБН курсовые планки и бленкеры НКП-4 подключаются к аппаратуре РСБН (режимы «Азимут и СРП»).
Указатели положения обоих НКП-4 подключаются последовательно, а вход блока БК-5 — параллельно двум последовательно соединённым указателям. Бленкеры обоих НКП-4 подключаются параллельно к соответствующим цепям.
В положении «РСБН—СП-50» блок БК-5, курсовая планка и бленкер левого НКП-4 подключаются к навигационному каналу аппаратуры «РСБН-2С» («Свод»), а правый НКП-4 — к первому полукомплекту «Курс МП», работающему в режиме «СП-50».
Сигнал ε с выхода курсового канала аппаратуры «Курс МП» через блок коммутации (БК) подаётся на магнитоэлектрические системы указателей НКП-4, перемещающие курсовые планки, по которым определяют положение заданных траекторий относительно самолёта. Одновременно сигнал:
- ε через нормально замкнутые контакты реле Р6, Р7;
- ограничивающие резисторы R20, R21 в режиме «Посадка»;
- R26, R27 в режиме «Азимут»;
- R22, R23 в режиме «СРП»;
- R14, R13 в режиме «VOR», расположенные в блоке БР-46А, подаётся на вход 4-го блока БК-5.
С выхода 4-го канала (с резистора нагрузки R28) усиленный сигнал ε подаётся на левый и правый вычислители В-12 и автопилот АП-6Е или АП-6ЕМ-ЗП (клеммы Ж1, Ж2 РК).
Сигнал ξ с выхода глиссадного канала аппаратуры «Курс МП» через блок коммутации подаётся на магнитоэлектрические системы указателей НКП-4, перемещающие глиссадные планки, которые указывают положение глиссады планирования (траектории снижения) относительно самолёта. Одновременно сигнал ξ через нормально-замкнутые контакты Р7 и ограничивающие резисторы R6, R7 в режиме «Посадка», резисторы R4, R5 в режиме «Пробивание», расположенные в блоке БР-46А, подаётся на вход 3-го канала блока БК-5. Усиленный сигнал ξ с выхода 3-го канала блока БК-5 через резистор R51, расположенный в блоке БР-46А, подаётся в левый и правый вычислители В-12, в приборы ПП-1ПМ и в автопилот АП-6Е или АП-6ЕМ-ЗП.
Сигналы ε и ξ к системе «Путь-4МПА» подключаются с помощью реле блока коммутации аппаратуры «Курс МП».
При автоматическом управлении для обеспечения устойчивости системы «Самолёт—БСУ-ЗП» до перехода на визуальный полёт в системе «Путь-4МПА» введено автоматическое уменьшение передаточных отношений по сигналам ε, ξ и их производных рε, рξ. При нажатии кнопки-лампы «Глис.» на объединённым пульте управления системы БСУ-ЗП подаётся (с АП-6Е или АП-6ЕМ-ЗП) напряжение +27 В на реле Р6 блока БР-46А, которые в цепь сигнала ε подключает добавочные резисторы R18, R19, что вызывает уменьшение передаточных отношений Rε, Rрε на 25%. Через 50 с после нажатия на кнопку-лампу «Глис.» с АП-6Е или АП-6ЕМ-ЗП подаётся напряжение —27 А на реле Р7 блока БР-46А, которое своими контактами подключает добавочные резисторы R57, R58 в цепь сигнала -, а резисторы R2, R3 в цепь сигнала ξ. Это вызывает уменьшение передаточных отношений Rε, Rрε на 20%, а передаточных отношений Rξ, Rрξ на 30%.
Система индикации отклонения от глиссады
Система индикации отклонения от глиссады (траектории снижения) состоит из:
- 7-го канала усиления;
- двигателя М1 (ДИД-0,5У);
- потенциометра R1;
- подвижного треугольного индекса ПП-1ПМ.
Сигнал ξ отклонения от глиссады с выхода 3-го канала блока БК-5 через ограничивающие резисторы R52, R53 блока БР-46А подаётся на вход 7-го канала У-20Н. После усиления сигнала ξ подаётся на двигатель М1 (ДИД-0,5У) который через редуктор перемещает треугольный индекс и смещает щётку потенциометра R1 до тех пор, пока сигнал с него на входе 7-го канала не скомпенсирует сигнал ξ, т. е. за счёт потенциометра R1 обеспечивается жёсткая обратная связь. Отклонение треугольного индекса от среднего положения указывает лётчику, где относительно самолёта находится глиссада.
Резисторы R9 (ПП-1ПМ) и R33, R34 (БР-46А) обеспечивают необходимую обратную связь. Конденсаторы С16—С19 составляют дифференцирующее звено, включённое в цепь обратной связи и служащие для улучшения динамических свойств следящей системы.
Формирование команды по крену δz.
Для сведения командных стрелок приборов ПП-1ПМ и включения вычислителей В-12 необходимо включить тумблер «СТУ» на объединённом пульте управления автопилота АП-6Е или АП-6ЕМ-ЗП.
Сигнал команды по крену δz формируется в пятом канале усиления У-20Н путём сравнения сигналов истинного γ и заданного γз кренов.
Сигнал истинного крена γ с ЦГВ-4 после усиления во 2-ом канале блока БК-5 подаётся с резистора нагрузки R12 через ограничивающие резисторы R16, R15 на вход 5-го канала У-20Н.
Сигнал заданного крена γз формируется на третьем и четвёртом блоках вычислителя В-12 (боковой канал) из сигналов ∆ψ и ε.
Сигнал ∆ψ с потенциометра R1 прибора НКП-4 подаётся в третий блок В-12 через нормально замкнутые контакты реле Р5 блока БР-46А, через резисторы R9, R10 и конденсаторы С11, С12. Управляющая обмотка третьего блока с конденсаторов С11, С12 составляют дифференцирующее звено, на котором сигнал ∆ψ дифференцирующее звено на вход третьего блока поступает сигнал производной рψ. Одновременно сигнал ∆ψ подаётся на вход четвёртого блока В-12 (на две управляющие обмотки). На одну обмотку сигнал ∆ψ1 поступает через резисторы R13, R14, расположенные в вычислителе В-12, на другую обмотку — через нормально замкнутые контакты реле Р5, резистор R11, регулировочные резисторы R12, R28, терморезистор R30 и резистор R31. Второй сигнал ∆ψ2 поступает с обратным знаком по отношению к первому в навигационных режимах и отключаются контактами реле Р5. Сигнал ∆ψ2 ограничивается сверху до величины 28°,5 стабилитронами Д1, Д2, включёнными параллельно управляющей обмотки четвёртого блока вычислителя В-12. Поэтому при отклонениях самолёта от заданного курса до 28°,5 оба сигнала (∆ψ1, ∆ψ2) компенсируют друг друга и результирующий сигнал равен нулю. При отклонениях больше 28°,5 сигнал ∆ψ2 ограничивается стабилитронами до величины 28°,5, а сигнал ∆ψ1 увеличивается пропорционально отключению от заданного курса. В результате на входе четвёртого блока появляется линейно увеличивающийся сигнал ∆ψ.
С помощью вычитания сигналов ∆ψ1 и ∆ψ2 обеспечивается зона нечувствительности в диапазоне ±28°,5, что необходимо для устранения статической ошибки, вызванной боковым ветром.
Резистор R12 служит для регулирования равенства сигналов ∆ψ1 и ∆ψ2. Резистор R28 служит для установки пределов ограничения второго сигнала ∆ψ2.
Сигнал ε после усиления в четвёртом канале блока БК-5 с резистора нагрузки R28 через резисторы R54, R55, нормально замкнутые контакты реле Р5, резисторы R7, R8, R28, R31 и терморезистор R30 подаётся на вход четвёртого блока В-12 (на ту же обмотку, что и сигнал ∆ψ2). На входе четвёртого блока В-12 сигнал ε ограничивается в пределах ±2°,2 стабилитронами Д1, Д2. Однако временно сигнал ε через резисторы R56, R61 нормально замкнутые контакты реле Р7, Р9 и конденсаторы С4 — С8 подаётся четыре последовательно включённые управляющие обмотки третьего блока В-12. Конденсаторы С4 — С8 и управляющие обмотки третьего блока В-12 составляют дифференцирующие звено.ю на котором сигнал ε дифференцируется и на вход третьего блока В-12 подаётся сигнал производной рε.
Через 50 с после нажатии кнопки-лампы «Глис.» на объединённом пульте управления срабатывает реле Р7 и своими нормально разомкнутыми контактами переключает сигнал рε с четырёх на две последовательно соединённые управляющие обмотки третьего блока, уменьшая при этом порцию Rрε.
На третьем блоке В-12 сигнал рε фильтруется, усиливается и суммируется с компенсирующим сигналом рψ. Сумма сигналов рε и рψ с выхода третьего блока через резистор 22 подаётся в четвёртый блок В-12.
В четвёртом блоке В-12 путём алгебраического суммирования сигналов ε, рε, рψ, ∆ψ формируется сигнал заданного крена γз, который после ограничения (±18°,5) с выхода блока через резисторы R18, R19 подаётся на вход 5-го канала У-20Н и блок связи БС-3.
На входе 5-го канала У-20Н сигналы γз и γ сравниваются. Разность между этими сигналами и является сигналом команды по крену δz. Сигнал команды δz после усиления и преобразования в сигнал переменного тока с выхода 5-го канала У-20Н подаётся в прибор ПП-1ПМ для индикации.
В навигационных режимах («Азимут», «СРП», «VOR») срабатывают реле Р5, Р9 блока БР-46А и реле Р1, Р2 вычислителя В-12. Контактами реле Р5 в цепь сигнала ε подключаются резисторы R9, R10, что приводит к уменьшению порции Rε сигнала.
Реле Р9 через нормально разомкнутые контакты подключает сигнал угла сноса с системы НАС-1А6к на две последовательно соединённые управляющие обмотки третьего блока В-12 и одновременно отключает сигнал рε. Реле Р2 отключает стабилитроны Д1, Д2, а реле Р1 отключает конденсаторы С4 — С8.
Система индикации команды по крену δz
Система индикации команды по крену δz состоит из:
- 5-го канала усиления У-20Н;
- двигателя М3 (ДИД-0,5У);
- потенциометра R3;
- вертикальной командной стрелки прибора ПП-1ПМ.
С выхода 5-го канала У-20Н сигнал команды δz через блок БР-46А подаётся на управляющую обмотку двигателя М3, который через редуктор перемещает вертикальную командную стрелку прибора ПП-1ПМ и щётку потенциометра R3 до тех пор, пока сигнал с него не скомпенсирует на выходе 5-го канала сигнала команды δz, т. е. потенциометр R3 обеспечивает жёсткую обратную связь. Отклонение вертикальной командной стрелки относительно чёрного кружка, расположенного в центре лицевой части прибора, является командой лётчику делать левый или правый крен. Резисторы R13 (ПП-1ПМ), R29, R30 (БР-46А) обеспечивают необходимую обратную связь. Конденсаторы С10 — С13 составляют дифференцирующие звено, включённое в цепь обратной связи и служащие для улучшения динамических свойств следящей системы.
Команда по тангажу δн
Формируется в продольном канале вычислителя В-12 на блоках 1 и 2. Для этого на указанные блоки подаются сигналы ϑ и ξ с соответствующими порциями.
Сигнал ϑ с ЦГВ-4 после усиления в первом канале блока БК-5 с резистора нагрузки R8 подаётся в вычислитель В-12 на дифференцирующее звено, состоящее из конденсатора С17, резисторов R20, R21 и управляющей обмотки второго блока. На этом звене происходит дифференцирование сигнала ϑ и сигнал производной рϑ подаётся на вход второго блока В-12.
Сигнал ξ после усиления в 3-ем канале блока БК-5 с резистора нагрузки R24 подаётся через резисторы порции R4, R5 на вход второго блока В-12. Одновременно сигнал ξ через резистор R51 подаётся на дифференцирующее звено, состоящее из конденсатора С3, управляющей обмотки первого блока и резисторов R1, R2. После дифференцирования сигнал рξ подаётся на вход первого блока В-12, на котором производится его фильтрация и усиление. С выхода первого блока сигнал рξ подаётся через резистор R26 на вход второго блока В-12.
На втором блоке путём алгебраического суммирования сигналов рϑ, ξ, рξ формируется сигнал команды по тангажу δн, который подаётся в 6-ой канал У-20Н и в блок связи БС-3. После усиления и преобразования в 6-ом канале У-20Н сигнал команды по тангажу δн подаётся в прибор ПП-1ПМ для индикации.
Система индикации команды по тангажу δн
Система индикации команды по тангажу δн состоит из:
- 6-го канала усиления У-20Н;
- двигателя М2 (ДИД-0,5У);
- потенциометра R2;
- горизонтальной командной стрелки прибора ПП-1ПМ.
Работает система индикации по тангажу так же, как и система индикации команды по крену. Смещение горизонтальной командной стрелки относительно центрального кружка является командой изменять тангаж самолёта.
Конденсаторы С14, С15 составляют дифференцирующее звено, включённое в цепь обратной связи для улучшения динамических свойств следящей системы. Резисторы R11 (ПП-1ПМ), R31, R32 (БР-46А) обеспечивают необходимую обратную связь.
Регулировка нулевого положения командных стрелок.
В процессе эксплуатации системы за счёт ложных сигналов, вызванных дрейфом нуля блоков (БК-5, В-12, У-20Н), командные стрелки могут оказаться смешанными от нулевого положения при отсутствии сигналов команд. Для установки командных стрелок в нулевое положение используются потенциометры 5R17, 6R17, расположенные на передней части усилителя У-20Н.
Указанные потенциометры с потенциометрами обратной связи R2, R3 ПП-1ПМ образуют мостовые схемы, в одну диагональ которых подводится постоянное напряжение 27 В, а в другой диагонали со щёток потенциометров снимается напряжение на вход соответствующего канала У-20Н. При перемещении щётки потенциометра R17 мост рассогласуется и на вход усилителя подаётся сигнал, что приводит к работе двигателей (М3, М2) и перемещению командных стрелок. После согласования мостовых схем командные стрелки устанавливаются в нулевое положение.
Развод командных стрелок прибора ПП-1ПМ
Если система «Путь-4МПА» в составе БСУ-ЗП не используется, то командные стрелки мешают использовать приборы ПП-1ПМ, как указатели авиагоризонтов. В этом случае предусмотрен принудительный развод командных стрелок с помощью выключателя - пульта управления автопилота АП-6Е или АП-6ЕМ-ЗП. При установки выключателя «СТУ» в положение «Выкл.» снимается питание +27 В с реле Р4, Р8, которые в свою очередь, обесточивают реле Р1, Р2 блока реле БР-46А. Реле Р1, Р2 своими контактами отключают управляющие обмотки двигателей М3, М2 отработки команд от выходов 6-го и 5-го каналов У-20Н и подключают их через фазосдвигающие конденсаторы С1, С2 к источнику 36 В 400 Гц. Двигатели М3, М2 отклоняют до упора вертикальную стрелку вправо, а горизонтальную — вверх. Одновременно контакты реле Р1 и Р2 отключают напряжение +27 В от вычислителя В-12 и от 5-го и 6-го каналов У-20Н.
Кроме того, в навигационных режимах горизонтальная командная стрелка прибора ПП-1ПМ не используется. Поэтому предусмотрен её автоматический развод в режимах:
- «СРП», «Азимут» системы РСБН-2С;
- «VOR» системы «Курс МП».
Сигнализация неисправности системы
Так как в левый и правый полукомплекты системы «Путь-4МПА» подаются одни и те же сигналы, то при исправной системе командные стрелки в левом и правом приборах ПП-1ПМ отклоняются на одинаковые величины.
При неисправностях системы возникает рассогласование в отклонении командных стрелок. Для выявления неисправностей в боковом и продольном канале системы используются соответственно 4-ый и 3-ий каналы усиления блокаБК-6. На входе этих каналов сравниваются сигналы команд δz и δн левого и правого полукомплектов системы. Сигналы пропорциональные командам, снимаются с потенциометров обратных связей R3, R2 левого и правого ПП-1ПМ. При рассогласовании командных стрелок больше чем на 6±1,5 мм срабатывают реле Р5, Р4, включённые на выход 4-го и 3-го каналов блока БК-6, и своими контактами подключают напряжение +27 В на сигнальные лампочки «Путь бок.», «Путь прод.», которые сигнализируют об отказе соответствующего канала.
Одновременно напряжение +27 В подаётся в автопилот АП-6Е или АП-6ЕМ-ЗП для перевода его каналов с режима автоматического полёта по заданной траектории на другие режимы работы.
Отказ радиотехнических средств (РТС) навигации и посадки
Отказ радиотехнических средств (РТС) навигации и посадки индицируется с помощью бленкеров курса и глиссады приборов НКП-4. Закрытие бленкеров курса и глиссады РТС и поступление с них в систему «Путь-4МПА» сигналов ε и ξ. Открытие бленкеров в зоне действия радиомаяков сигнализирует о неисправности РТС. В этом случае запрещается пользоваться командными стрелками прибора ПП-1ПМ.
Система «Путь-4МПА» питается через автоматы защиты от сети трёхфазного переменного тока 36 В 400 Гц и от борт сети постоянного тока 27 В.
Следящие системы крена и тангажа приборов ПП-1ПМ, а также 8-ой и 9-ый каналы У-20Н левого и правого полукомплекта напряжениями 36 и 27 В запитываются при включении соответственно левой и правой ЦГВ-4.
После включения питания ЦГВ-4 для быстрого их восстановления нажимают одну из кнопок, расположенных на лицевой части приборов ПП-1ПМ. После восстановления ЦГВ-4 приборы ПП-1ПМ показывают нулевой крен и тангаж.
Следящая система курса НКП-4 и 3-ий, 4-ый и 7-ой каналы У-20Н левого и правого полукомплектов питаются напряжением 27 В от АЗС курсовой системы.
При установке выключателя «СТУ» пульта управления АП-6Е или АП-6ЕМ-ЗП в положение «Подг.» напряжение 27 В в левом и правом полукомплектах подаётся для питания вычислителя В-12, 5-го и 6-го каналов У-20Н и на реле Р4, РВ блока реле БР-46А.
ВЫЧИСЛИТЕЛЬ В-12
Вычислитель В-12 предназначен для формирования каналов управления движением самолёта по заданной траектории. Вычислитель состоит из двух самостоятельных каналов — бокового и продольного. В боковом канале формируется сигнал заданного крена γз, в продольном — сигнал команды по тангажу δн.
Боковой канал (см. рис 7) состоит из двух вычислительных блоков (3 и 4) и двух дифференцирующих звеньев.
Продольный канал (см. рис 11) состоит из двух вычислительных блоков (1 и 2) и двух дифференцирующих звеньев.
Вычислительные блоки БВ-5 бокового и продольного каналов собраны по одинаковой схеме и взаимозаменяемы. Вычислительный блок БВ-5 — это усилитель постоянного тока, позволяющий суммировать на его входе пять отдельных сигналов постоянного тока.
Рис. 16 Апериодическое (инерционное) звено.
Одновременно вычислительный блок используется как фильтр для снижения уровня высокочастотных помех, содержащихся в сигналах ε, рε, ξ, рξ. Для этого усилитель постоянного тока (пропорциональное звено) превращают в апериодическое (инерционное) звено путём включения в цепь обратной связи цепочки RC (см. рис. 16).
Передаточная функция RC звена обратной связи
Передаточная функция усилителя с обратной связью
где Ʀ — коэффициент усиления усилителя без обратной связи;
Ʀ1 — коэффициент усиления усилителя без обратной связью
Т — постоянная времени инерционного звена (Т=Ʀ1С).
Таким образом, усилитель постоянного тока с ёмкостью обратной связью представляет собой апериодическое звено с коэффициентом усиления Ʀ1 и постоянной временя Т. Коэффициент усиления инерционного звена Ʀ1 значительно стабильнее коэффициента усиления усилителя без обратной связи.
Усилитель постоянного тока (блок БИ-5) собран по схеме с двойным преобразованием входного канала и состоит из магнитного усилителя (МУ), полупроводникового усилителя (ППУ) и фазочувствительного выпрямителя (ФЧВ). Такая схема усилителя имеет меньший дрейф нуля по сравнению с усилителями постоянного тока прямого усиления.
В магнитном усилителе входной сигнал постоянного тока усиливается и преобразуется в сигнал переменного тока частоты 400 Гц, который подаётся в полупроводниковый усилитель, где производится его основное усиление. С выхода полупроводникового усилителя усиленный сигнал подаётся на вход фазочувствительного выпрямителя для усиления и обратного преобразования в сигнал постоянного тока.
Магнитный усилитель
Рис. 17а. Магнитный усилитель блока БИ-5 (В-12).
Магнитный усилитель собран по мостовой схеме на четырёх пермаллоевых сердечниках, на каждом из которых размещаются рабочие обмотки W1—W4 (рис. 17а).
Рабочие обмотки соединяются по схеме моста. В одну диагональ моста от силового трансформатора подводится напряжение частоты 400 Гц, ас другой диагонали моста снимается выходное напряжение. На каждой паре сердечников размещаются обмотки начального подмагничивания (смещение) W5, W6, запитанные от источника постоянного тока 27 В. Эти обмотки создают в каждой паре сердечников одинаковые магнитные потоки подмагничивания Фп противоположного направления. Резисторы R1, R2, R4 служат для температурной стабилизации коэффициента усиления МУ. Переменный резистор R3 служит для балансировки МУ.
Пять управляющих обмоток W7, W11 размещаются одновременно на всех четырёх сердечниках.
При отсутствии входных сигналов сердечники подмагничены одинаково и все рабочие обмотки W1, W4 имеют одинаковые сопротивления.
Мост переменного тока находится в равновесии и сигнал на выходе МУ равен нулю.
При подаче на управляющие обмотки входных сигналов они создают в сердечниках МУ магнитные потоки управления, которые алгебраически суммируются. суммарный магнитный поток управления Фу во всех сердечниках направлен в одну сторону и в одной паре сердечников складывается с магнитным потоком подмагничивания, а в другой паре вычитается. В результате общий магнитный поток первой пары сердечников увеличивается, а их магнитная проницаемость уменьшится. При этом сопротивление рабочих обмоток первой пары сердечников уменьшается, а второй пары увеличивается. Равновесие моста нарушается, и на выходе МУ появляется сигнал частоты 400 Гц, фаза которого зависит от полярности, а амплитуда от величины суммарного входного сигнала. Этот сигнал через трансформатор Тр1 подаётся на вход полупроводникового усилителя.
Полупроводниковый усилитель
Рис. 17б. Полупроводниковый усилитель блока БИ-5 (В-12).
Полупроводниковый усилитель собран по двухтактной схеме на германиевых триодах ПП1 и ПП2 (МП14Б), включённых по схеме с общим эмиттером (рис. 17б).
Для выбора рабочей точки на характеристике триодов и для температурной стабилизации усиления служит делитель напряжения, состоящий из резисторов R5, R6, подключённых к источнику постоянного тока 27 В. С помощью делителя задаётся необходимая разность потенциалов между эмиттером и базами триодов ПП1 и ПП2.
Резистор R7, включённый в общую цепь эмиттеров, является сопротивлением отрицательной обратной связи по постоянному току, а также обеспечивает схемную температурную стабилизацию коэффициента усиления каскада.
Резистор R8, включённый в общую цепь коллекторов, обеспечивает необходимый потенциал на коллекторах транзисторов, а также ограничивает коллекторный ток при изменении температуры.
Нагрузкой каскада является трансформатор Тр2, первичная обмотка которого включена между коллекторами триодов. Конденсаторы С1 и С2 совместно с индуктивностью обмотки трансформатора Тр2 составляют параллельный резонансный контур, настроенный на частоту 400 Гц, за счёт которого улучшается частотно-фазовая характеристика усилителя. Со вторичной обмотки трансформатора Тр2 усиленный сигнал снимается на вход фазочувствительного выпрямителя.
Фазочувствительный выпрямитель
Рис. 18а. Фазочувствительный выпрямитель блока БВ-5 (В-12).
Фазочувствительный выпрямитель (рис. 18а) состоит из усилителя переменного тока, собранного на германиевом плоскостном триоде ПП3 (П4Б), и выпрямительного моста, собранного на четырёх кремниевых диодах Д1—Д4 (Д226).
Для нормальной работы ФЧВ на него через трансформатор Тр2 подаётся входное напряжение Uвх, а через трансформатор Тр1 — опорное напряжения Uо.
Опорное напряжение служит для определения фазы входного напряжения.
Триод ПП3 питается выпрямлённым на диодах Д1—Д4 опорным напряжением. В цепи питания, до выпрямителя, включён резистор нагрузки R13.
Для выбора рабочей точки необходимое напряжение смещения (между эмиттером и базай триода ПП3) создаётся с помощью делителя напряжения R10, R11.
Резистор R12, включённый в цепь эмиттера, отрицательную обратную связь по току и схемную температурную стабилизацию коэффициента усиления.
При отсутствии входного сигнала сопротивление триода ПП3 не меняется. Ток опорного напряжения в один полупериод протекает по цепи (см. рис. 18а):
- +Тр1;
- Д2;
- R12,
- ПП3;
- Д3;
- R13;
- -Тр1,
а в другой полупериод по цепи:
- +Тр1;
- R13;
- Д1,
- R12;
- ПП3;
- Д4;
- -Тр1.
Рис. 18б. Фазочувствительный выпрямитель блока БВ-5 (В-12).
На резисторе R13 выделяется переменное напряжение, повторяющее форму опорного и не содержащее постоянной составляющей (рис. 18б).
При наличии входного сигнала Uвх в тот момент, когда на базе триода положительный потенциал, коллекторный ток уменьшается (пунктир), так как сопротивление триода увеличивается. На резисторе нагрузки R13 выделяется меньшая амплитуда напряжения (пунктир).
В следующий полупериод на базе триода будет отрицательный потенциал входного сигнала. Коллекторный ток увеличивается, и на резисторе нагрузке R13 выделяется большая амплитуда напряжения.
Таким образом, при наличии входного сигнала на резисторе нагрузки R13 выделяется переменное пульсирующее напряжение, содержащие постоянную составляющую, полярность которой зависит от фазы входного сигнала. При изменении фазы входного сигнала на 180° полярность постоянной составляющей изменяется на обратную.
Конденсаторы С3, С4 сглаживают пульсации выходного сигналя. Величина выходного сигнала ограничивается кремниевыми стабилитронами Д7, Д8 (Д813), включёнными параллельно резистору нагрузки R13.
Стабилитроны работают на обратной ветви характеристики, ограничивая величину тока через резистор R13. С помощью переменного резистора R19 можно изменять уровень ограничения выходного сигнала.
Как уже отмечалось, для превращения усилителя постоянного тока в инерционное звено и стабилизации его коэффициента усиления он охвачен отрицательной обратной связью через RC-цепочку. Эта обратная связь осуществляется с выхода ФЧВ на одну из свободных обмоток магнитного усилителя.
Рис. 19. Схема входных и выходных цепей вычислителя В-12.
Элементы электросхемы вычислителя В-12 имеют следующее назначение:
- С3—конденсатор дифференцирующего звена для формирования сигнала производной рξ отклонения от равносигнальной зоны глиссады;
- R1+R2—резисторы дифференцирующего звена для формирования сигнала производной рξ;
- С9, С13—конденсаторы фильтра блоков 1 и 2;
- R26—резистор, определяет порцию сигнала производной отклонения от равносигнальной зоны глиссады Ʀрξ, формируемого блоком 1;
- R4+R5—резисторы определяют входную порцию сигнала отклонения от равносигнальной зоны глиссады Ʀξ, поступающего с усилителя Бк-5 на блок 2;
- С17—конденсатор дифференцирующего звена для формирования сигнала производной рϑ текущего тангажа;
- R20+R21—резисторы дифференцирующего звена для формирования сигнала производной рϑ;
- R6—резистор, определяет порцию сигнала команды по тангажу δн, формируемого блоками 1 и 2;
- С4—С8—конденсатор дифференцирующего звена для формирования сигнала производной рε от равносигнальной зоны курса;
- С11, С12—конденсаторы дифференцирующего звена для формирования сигнала производной рψ от заданного курса;
- R9, R10—резисторы дифференцирующего звена для формирования сигнала производной рψ;
- С14, С18—конденсаторы RC-цепочки обратной связи блоков 2 и 3;
- R22—резистор определяет выходную порцию сигналов рε, рψ снимаемых с выхода блока 3;
- R18, R19—резисторы определяют выходную порцию сигнала заданного крена γз, сформированного в блоках 3 и 4;
- С15—конденсатор фильтра блока 4;
- С19—конденсатор RC-цепочки обратной связи блока 4;
- R13, R14—резисторы определяют входную порцию сигнала отклонения от заданного курса ∆ψ, поступающего с прибора НКП-4;
- R12—резистор для регулировки зоны нечувствительности (равенства двух сигналов ∆ψ);
- R28—резистор для регулировки величины зоны нечувствительности (угла подхода);
- Д1, Д2—стабилитроны ограничителя сигналов ∆ψ и ε;
- R30, R31—резисторы термокомпенсации стабилитронов Д1, Д2 при работе в диапазоне температур от +50, до -60°С.
Устройство вычислителя
Вычислитель В-12 собран из четырёх взаимозаменяемых блоков БВ-5. Детали блока смонтированы на кронштейне. В верхней части кронштейна выведено шесть контактных гнёзд, позволяющих контролировать работу блока при наладке и регулировке в процессе эксплуатации.
На гнёзда 1—2 выведен выход магнитного усилителя, на гнёзда 3—4 — выход полупроводникового усилителя и на гнёзда 5—6 — выход блока БВ-5. В нижней части блока БВ-5 размещается штепсельный разъём ГР-1, с помощью которого блок соединяется со схемой вычислителя.
Блоки БВ-5 закрепляются с помощью двух винтов сверху на общем шасси. Спереди на шасси укреплён угольник с постоянными резисторами, определяющими порции сигналов в вычислителе. Снизу на шасси укреплены блоки конденсаторов, силовой трансформатор и регулировочные резисторы. Шасси крепится на амортизационном основании. С системой «Путь-4МПА» вычислитель соединяется через 32-штырьковый штепсельный разъём, укреплённый на передней панели вычислителя.
УСИЛИТЕЛЬ У-20Н
Усилитель У-20Н предназначен для усиления сигналов рассогласования следящих систем приборов ПП-1ПМ и НКП-4. Усилитель состоит из восьми самостоятельных каналов усиления.
Канал 2
Канал 2 усиливает сигналы заданного курса ψз переменного тока, снимаемые с сельсина-приёмника прибора НКП-4, и выдаёт усиленный сигнал на управляющие обмотки двигателя системы заданного курса прибора НКП-4. В системе НКП-4 этот канал не задействован.
Канал 3
Канал 3 усиливает сигналы текущего курса ψ переменного тока, снимаемые с сельсина-датчика курсовой системы через сельсин-приёмник следящей системы курса прибора НКП-4 и выдаёт усиленный сигнал на управляющие обмотки двигателя системы курса прибора НКП-4.
Канал 4
Канал 4 усиливает сигналы КУР переменного тока, поступающие сельсин-датчика радиокомпаса через сельсин-приёмник следящей системы КУР прибора НКП-4, и выдаёт усиленный сигнал на управляющие обмотки двигателя системы КУР прибора НКП-4.
Канал 5
Канал 5 формирует сигнал команды по крену δz путём суммирования на его входе сигналов заданного γз и истинного γ кренов. Сформированный сигнал команды по крену δz усиливается, преобразуется в сигнал частоты 400 Гц и с выхода канала поступает на управляющую обмотку двигателя системы отработки команды по крену прибора ПП-1ПМ.
Канал 6
Канал 6 преобразует сигнал постоянного тока команды по тангажу δн, снимаемый с вычислителя В-12, в сигнал частоты 400 Гц, усиливает его и подаёт на управляющую обмотку двигателя системы отработки команды по тангажу прибора ПП-1ПМ.
Канал 7
Канал 7 преобразует сигнал постоянного тока отклонения от глиссады, поступающий с блока БК-5, в сигнал частоты 400 Гц, усиливает его и подаёт на управляющую обмотку двигателя системы индикации отклонения от глиссады прибора ПП-1ПМ.
Канал 8
Канал 8 преобразует сигнал крена постоянного тока, поступающий с ЦГВ-4 через потенциометр-приёмник прибора ПП-1ПМ, в сигнал частоты 400 Гц, усиливает его и подаёт на управляющую обмотку двигателя системы индикации крена.
Канал 9
Канал 9 преобразует сигнал тангажа постоянного тока, поступающий с потенциометр-датчика ЦГВ-4 через потенциометр-приёмник прибора ПП-1ПМ, в сигнал частоты 400 Гц, усиливает его и подаёт на управляющие обмотки двигателя системы индикации крена ПП-1ПМ.
Все каналы усиления У-20Н делятся на два типа:
- первый тип — усилитель со входом по переменному току;
- второй тип — усилитель со входом по постоянному току.
К первому типу относятся каналы усиления 2, 3, 4, обеспечивающие работу следящих систем прибора НКП-4. Ко второму типу относятся остальные каналы усиления усилителя У-20Н, обеспечивающие работу следящих систем прибора ПП-1ПМ.
Усилитель второго типа состоит из магнитного усилителя, полупроводникового усилителя и фазочувствительного выпрямителя.
Магнитный усилитель
В магнитном усилителе входной сигнал постоянного тока усиливается и преобразуется в сигнал частоты 400 Гц, который подаётся в полупроводниковый усилитель, где производится его основное усиление по напряжению и мощности. С выхода ППУ сигнал подаётся на отрабатывающий двигатель соответствующей следящей системы и одновременно на вход ФЧВ. В ФЧВ сигнал переменного тока преобразуется в сигнал постоянного тока, который подаётся на вход магнитного усилителя, как отрицательная обратная связь, повышающая стабильность коэффициента усиления при изменении температуры и напряжения питания. Магнитный усилитель собран и работает так же, как и магнитный усилитель блока БВ-5 вычислителя В-12.
Рис. 20. Полупроводниковый усилитель У-20Н
Полупроводниковый усилитель состоит из двух каскадов (рис. 20). Первый каскад является усилителем напряжения и собран по двухтактной схеме на двух германиевых триодах ПП1 и ПП2 (МПР14А), включённых по схеме с общим эмиттером. Для выбора рабочей точки и стабилизации коэффициента усиления каскада при изменении температуры служит делитель напряжения из резисторов R2 и R3. С помощью делителя задаётся необходимая разность потенциалов между эмиттерами и базами триодов ПП1 и ПП2. Резистор R4, включённый в общую цепь эмиттеров триодов, обеспечивает отрицательную обратную связь по току, за счёт которой осуществляются схемная температурная стабилизация коэффициента усиления каскада.
Резистор R5, включённый в общую сеть коллекторов, обеспечивает необходимый потенциал на коллекторах триодов, а также ограничивает коллекторный ток при изменении температуры.
Нагрузкой каскада является трансформатор Тр2. Конденсатор С1 служит для улучшения частотно-фазовой характеристики каскада.
Входной сигнал частоты 400 Гц с выхода МУ через резистор R1 поступает на первичную обмотку трансформатора Тр1. Со вторичной обмотки трансформатора сигнал подаётся на базы триодов ПП1 и ПП2. Усиленный сигнал со вторичной обмотки трансформатора Тр2 поступает на вход второго каскада.
Второй каскад — усилитель мощности — собран на германиевом триоде ПП3 (П215), включённом по схеме с общим коллектором (эмиттерный повторитель), что позволяет корпус триода, соединённый с его коллектором, для лучшей теплоотдачи соединять без изоляции с корпусом прибора. Корпус соединён с минусом источника постоянного тока 27 В.
Делитель R6, R7, R8 служит для выбора положения рабочей точки на характеристике триода и температурной стабилизации усилителя. Резистор R9 обеспечивает отрицательную обратную связь по току и увеличивает температурную стабилизацию каскада.
Для более жёсткой температурной стабилизации в цепь делителя включается терморезистор R7, а резистор R9 выполнен из медной проволоки. Нагрузкой каскада является автотрансформатор Тр3, включённый в цепь эмиттера триода, усиленный выходной сигнал с которого снимается на управляющие обмотки отрабатывающего двигателя соответствующей следящей системы.
Конденсатор С2, включённый параллельно обмотке автотрансформатора Тр3, обеспечивает сдвиг фаз на 90° между напряжениями на управляющей обмотке и на обмотке возбуждения двигателя, что необходимо для нормальной работы двухфазного двигателя.
Для повышения стабильности коэффициента усиления и уменьшения нелинейных искажений ППУ охвачен отрицательной обратной связью, глубина которой определяется величиной резистора R10.
Фазочувствительный выпрямитель
Рис. 21. Фазочувствительный выпрямитель У-20Н
собран на четырёх кремниевых диодах Д1—Д4 (Д223), включённых по мостовой схеме. К одной диагонали моста через обмотку обратной связи Wос МУ резистор R12 прикладывается опорное напряжение частоты 400 Гц от силового трансформатора Тр4. К другой диагонали прикладывается часть выходного напряжения с ППУ, снимаемого с делителя напряжения R11, R25.
При отсутствии сигнала ППУ ток опорного напряжения в один полупериод протекает по цепи:
- +Тр4;
- Wос;
- R12;
- R14;
- Д4;
- Тр3;
- R11;
- Д2;
- -Тр4.
В другой полупериод ток протекает по цепи:
- +Тр4;
- Д3;
- Тр3;
- R11;
- Д1;
- Wос;
- -Тр4.
Так как в первый и второй полупериоды сопротивление цепей одинаково, то по управляющей обмотке Wос Му протекает переменный ток, не содержащий постоянной составляющей, и обратная связь отсутствует.
При наличии сигнала с ППУ в один полупериод этот сигнал на одном диодов будет складываться с опорным напряжением и ток через обмотку Wос увеличивается, во второй полупериод на другом из диодов эти напряжения вычитаются и ток через обмотку Wос уменьшается.
таким образом. с возникновением на выходе ППУ сигнала по управляющей обмотки обратной связи Wос Му начинает протекать пульсирующий ток, постоянная составляющая которого создаёт отрицательную обратную связь. Глубину отрицательной обратной связи, а следовательно, и коэффициент усиления канала можно регулировать изменением величины резистора R12.
Усилитель первого типа состоит из одного ППУ, используемого в усилителе второго типа.
Устройство У-20Н
Устройство У-20Н имеет блочную конструкцию, что обеспечивает удобство монтажа, сборки и наладки, а также замена одного блока другим. Каждый ППУ и каждый МУ оформлены в виде отдельного блока. Все элементы усилителя смонтированы на общем шасси. На шасси размещены блоки ППУ и МУ. Блоки ППУ включаются в схему усилителя через семиштырьковую ламповую панель и крепятся к кронштейну винтами. Снизу к шасси крепится силовой трансформатор и монтируется ФЧВ. Спереди на шасси крепится уголковый кронштейн, с закреплёнными на нём регулировочными резисторами 5R17, 6R17.
Резистор 5R17 пятого канала включён в цепь обратной связи системы командной стрелки крена прибора ПП-1ПМ и служит для устранения дрейфа нуля этой стрелки.
Резистор 6R17 шестого канала служит для устранения дрейфа нуля командной стрелки тангажа. Эти резисторы на передней панели усилителя У-20Н закрыты специальной крышкой. Усилитель соединяется со схемой «Путь-4МПА» с помощью двух штепсельных разъёмов. Кронштейн усилителя крепится на амортизационном основании.
БЛОК КОМБИНИРОВАННЫЙ БК-5
Блок БК-5 предназначен для линейного усиления сигналов постоянного тока, поступающих с датчиков. Блок состоит из четырёх самостоятельных линейных реверсивных усилителей (каналов) постоянного тока.
Канал 1
Канал 1 усиливает сигналы тангажа ϑ, поступающие на его вход с ЦГВ-4 через мост блока реле БР-46А.
Канал 2
Канал 2 усиливает сигналы крена γ, поступающие на его вход с ЦГВ-4 через мост блока реле БР-46А.
Канал 3
Канал 3 усиливает сигналы отклонения от глиссады ξ, поступающие на его вход с глиссадного канала системы «Курс МП».
Канал 4
Канал 4 усиливает сигналы отклонения от равносигнальной зоны курса ε, поступающие на его вход с курсового канала системы «Курс МП».
Каждый усилитель (канал) выполнен в виде отдельных взаимозаменяемых блоков БВ-2.
Блок БВ-2 представляет собой реверсивный усилитель постоянного тока, позволяющий на его входе суммировать пять независимых сигналов постоянного тока. Блок БВ-2 также, как и блок БВ-5 вычислителя В-12, собран по схеме с двойным преобразованием входного сигнала.
В магнитном усилителе входные сигналы алгебраически суммируются, усиливаются и преобразуются в сигнал частоты 400 Гц, который подаётся в полупроводниковый усилитель. С усилителя сигнал поступает на фазочувствительный выпрямитель, усиливается и преобразуется в сигнал постоянного тока, который после ограничения подаётся на выход. Для стабилизации коэффициента усиления и уменьшения дрейфа нуля блок БВ-2 охвачен отрицательной обратной связью.
Магнитный усилитель блока БВ-2
Магнитный усилитель блока БВ-2 аналогичен магнитному усилителю блока БВ-5 вычислителя В-12.
Полупроводниковый усилитель
Полупроводниковый усилитель состоит из двух двухтактных усилителей, работающих параллельно. Усилители собраны на полупроводниковый триодах (П9А), включённых по схеме с общим эмиттером. Схема усилителя аналогична схеме усилителя блока БВ-5 вычислителя В-12.
Рис. 22. Фазочувствительный выпрямитель блока БИ-2 (БК-5, БК-6).
Фазочувствительный выпрямитель (рис. 22) представляет собой двухтактный фазочувствительный усилительный каскад с удвоением выходного напряжения. Выпрямитель состоит из двух одноконтактных фазочувствительных выпрямителей (аналогичных ФЧВ блока БИ-5), работающих поочерёдно в разные полупериоды. ФЧВ собран на полупроводниковых триодах ПП5, ПП6 (П215) и диодах Д1—Д8.
ФЧВ опорным напряжением частоты 400 Гц, питается со вторичной обмотки силового трансформатора Тр1 блока БК-5 через резисторы нагрузки R13 и R14.
Опорное напряжение выпрямляется на выпрямительных мостах Д1—Д4 и Д5—Д8. Выпрямлённое неотфильтрованное напряжение прикладывается между эмиттерами и коллекторами триодов ПП5, ПП6.
Входные сигналы со вторичных обмоток трансформатора Тр2 подаются на участки эмиттер—база триодов в противофазе. При отсутствии входного сигнала с трансформатора Тр2 через триоды и резисторы нагрузки R13 и R14 протекают небольшие, равные по величине токи от источника опорного напряжения. Так как токи по резисторам нагрузки протекают в противоположные стороны, то на них выделяются одинаковые по величине напряжения. Разность потенциалов равна нулю, и выходной сигнал не снимается.
При подаче входного сигнала частоты 400 Гц, в один из полупериодов триод ПП5 будет закрыт (+ на базе), а триод ПП6 — открыт. При этом ток опорного напряжения протекает по цепи:
- +Тр1;
- R14;
- Д6;
- ПП6;
- Д8;
- R5;
- -Тр1.
На резисторе R14 выделяется напряжение, до величины которого заряжается конденсатор С8. Через резистор R13 ток не протекает, так как триод ПП5 закрыт. В следующий полупериод триод ПП5 откроется, а ПП6 закроется. При этом ток опорного напряжения будет протекать по цепи:
- +Тр1;
- R5;
- Д1;
- ПП5;
- Д3;
- R13;
- -Тр1.
На резисторе R13 выделяется напряжение и заряжается конденсатор С7. В это время конденсатор С8 разряжается через резистор R14, но за время, равное половине периода, он значительно разрядиться не успевает. В следующий полупериод конденсатор С8 снова подзарядится.
Выделяемое на резисторах R13 и R14 напряжение складывается, и суммарное напряжение выделяется на резисторе общей нагрузки Rн, с которого и снимается выходной сигнал. Полярность выходного напряжения зависит от фазы входного сигнала.
Выходной сигнал ограничивается за счёт насыщения триодов ПП5, ПП6. Предел ограничения определяется величиной опорного напряжения, снимаемого с трансформатора Тр1.
При увеличении входного сигнала ток коллектора увеличивается. Эта зависимость справедлива до тех пор, пока ток коллектора не станет определяться параметрами внешней цепи:
- прямым сопротивлением диодов;
- сопротивлением резисторов R13, R14, R15;
- сопротивлением обмотки трансформатора Тр1;
- величиной напряжения;
- питающего выпрямитель.
При дальнейшем увеличении входного сигнала коллекторный ток, а следовательно и выходное напряжение увеличиваться не будут. Происходит ограничение выходного сигнала. Предел ограничения регулируется резистором R5, включённым в цепь питания ФЧВ опорным переменным напряжением.
отрицательная обратная связь блока БВ-2 осуществляется подачей сигнала с выхода ФЧВ на одну из управляющих обмоток магнитного усилителя такой полярности, чтобы магнитный поток обратной связи вычитался из суммарного магнитного потока входных сигналов. Глубина обратной связи, а следовательно коэффициент усиления блока БВ-2 определяется резисторами R6 и R7, установленными вне блока. Для регулировки усиления блока БВ-2 служит переменный резистор R6.
Схема входных и выходных цепей блока БК-5
Схема входных и выходных цепей блока БК-5 для всех каналов представлена на (рис. 23).
Рис. 23. Схема входных и выходных цепей БК-5 (БК-6)
К а н а л 1. Входной сигнал тангажа ϑ поступает на четыре последовательно соединённые управляющие обмотки МУ, параллельно которым включён конденсатор С2, служит для подавления гармоник переменного тока от источника входного и гармоник, трансформируемых в управляющие обмотки магнитного усилителя с обмотки отрицательной обратной связи.
Для защиты МУ от перегрузок большими входными токами служат кремниевые стабилитроны Д1—Д4 (Д814А), включённые параллельно входу. Стабилитроны используются в прямом направление вольт-амперное характеристики. До тех пор, пока входной сигнал не достиг величины порога открытия стабилитронов, ток через них практически на протекает, а в обмотках управления МУ ток изменяется пропорционально изменению входного напряжения.
Когда входной сигнал достигает величины, при которой стабилитроны открываются, через них начинает протекать ток и на входе МУ поддерживается напряжение практически постоянной величины. Ток через управляющие обмотки МУ возрастать не будет при увеличении входного сигнала. Нагрузкой блока является резистор R8. Резистор R5 служит для регулировки уровня ограничения выходного сигнала. Резистор R29 и конденсатор С6 на выходе канала 1 служат для фильтрации выходного сигнала. Резисторы R13, R14 являются нагрузкой ФЧВ. Конденсаторы С7, С8 сглаживают пульсации выходного сигнала.
К а н а л ы 2, 3, 4. Входные сигналы поступают на четыре последовательно соединённые управляющие обмотки магнитных усилителей. Стабилитроны Д5—Д8, Д9, Д10, Д11—Д14 и конденсаторы С3, С4, С23, С5 имеют такое же назначение, как стабилитроны Д1—Д4 и конденсатор С2 канала 1. Обратная связь в каналах осуществляется через резисторы, не показанные на схеме. Нагрузкой каналов являются резисторы R12, R24, R28. Уровень ограничения выходного сигнала каналов регулируется резисторами R9, R21, R25. Фильтрами выходных сигналов являются:
- R30, С21;
- R32, С19, С20;
- R31, С24, С25, С26.
Нагрузкой ФЧВ в каждом канале являются соответственно резисторы R15—R16, R17—R18, R19—R20. Конденсаторы сглаживающих фильтров —С9 —С10, —С15 —С16, —С17 —С18.
Конденсаторы С11, С12, С13, С14 включены параллельно вторичным обмоткам силового трансформатора Тр1 и защищают сеть переменного тока от радиопомех, создаваемых блоком БК-5.
Устройство Бк-5.
Комбинированный блок БК-5 имеет основание, на котором укреплены четыре взаимозаменяемых блока БВ-2.
Блок БВ-2 имеет два П-образных кронштейна, образующих коробочку. Внутри кронштейнов закреплены две гетенаксовые пластинки с элементами электросхемы.
Со схемой блока БК-5 блок БВ-2 соединяется с помощью штепсельного разъёма, прикреплённого снизу.
В верхней части лока БВ-2 размещены контрольные гнёзда и переменный резистор R4 для регулировки нуля блока БВ-2.
Спереди на основании БК-5 перед блоками БВ-2 укреплён кронштейн, на котором размещено шесть переменных резисторов для регулировки каналов, а также постоянные резисторы и стабилитроны, входящие в схему БК-5. Два переменных резистора и два конденсатора размещены на кронштейне, укреплённом на основании блока БК-5 в его задней части. 12 конденсаторов укреплены в нижней части основания блока БК-5. Блок БК-5 соединяется со схемой «Путь-4МПА» через 45-штырьковый штепсельный разъём.
БЛОКИ БК-6 и БР-46А, СОЕДИНИТЕЛЬНАЯ КОРОБКА СК-29И
Комбинированный блок БК-6
Предназначен для усиления сигналов постоянного тока, поступающих с датчиков, и выдачи сигналов о неисправности бокового и продольного каналов системы «Путь-4МПА». Блок состоит из четырёх самостоятельных реверсивных усилителей постоянного тока, представляющих собой блоки БВ-2.
К а н а л ы 1 и 2 блока БК-6 (так же, как и блока БК-5) задействованы соответственно для усиления сигналов тангажа и крена, используемых в правом полукомплекте системы «Путь-4МПА».
К а н а л 3 усиливает сигналы рассогласования показаний командных стрелок тангажа двух приборов ПП-1ПМ и выдаёт сигнал +27 В в блок контроля БК-4 автопилота АП-6Е или АП-6ЕМ-ЗП и на световую сигнализацию при рассогласовании командных стрелок тангажа более чем на 6±1,5 мм.
К а н а л 4 усиливает сигналы рассогласования показаний командных стрелок крена двух приборов ПП-1ПМ и выдаёт сигнал +27 В в блок контроля БК-4 автопилота АП-6Е или АП-6ЕМ-ЗП и на световую сигнализацию при рассогласовании командных стрелок тангажа более чем на 6±1,5 мм.
Рис. 24. Электрическая схема 3 (4) канала блока БК-6.
Электрическая схема 3-го канала (рис. 24). Входной сигнал поступает со щёток потенциометров обратной связи R2 левого и правого приборов ПП-1ПМ через резистор R22 и регулировочный резистор R21 на три последовательно соединённые управляющие обмотки магнитного усилителя блока БВ-2.
Резистор R21 служит для регулировки предела срабатывания сигнализации неисправности. Конденсатор С4—элемент фильтра.
Усиленный сигнал с выхода блока Бв-2 поступает на обмотку реле Р4 и через резисторы R39, R38, R37 подаётся на вход магнитного усилителя, обеспечивая отрицательную обратную связь. Параллельно обмотке обратной связи включены стабилитроны Д9, Д10, работающие на прямой ветви воль-амперной характеристики.
при малых входных напряжениях соответствующий стабилитрон закрыт, статическая характеристика имеет пологий вид, так как в блоке БВ-2 в этом случае действует глубокая отрицательная обратная связь.
С момента открытия соответствующего стабилитрона ток в обмотке обратной связи стабилизируется, а при увеличении входного сигнала блока БВ-2 выходное напряжение растёт, но ток обратной связи не увеличивается, и статическая характеристика поднимается круто вверх, приближаясь к релейной.
При достижении входного сигнала величины 1,2 В, соответствующего рассогласования командных стрелок на 6±1,5 мм, напряжение на выходе блока БВ-2 будет достаточным для срабатывания реле Р4 (РЭС-9).
Через замкнувшиеся контакты реле Р4 на сигнальную лампочку табло «Отказ путь—прод.» и в блок контроля БК-4 автопилота АП-6Е или АП-6ЕМ-ЗП подаётся напряжение +27 В.
переменный резистор R37 служит для регулировки наклона статической характеристики канала и для смещения точки открытия стабилитронов.
Ткакя регулировка необходима для обеспечения срабатывания реле, включённого на выходе канала, при входном токе 20±3 мкА.
При регулировки нейтрального положения командных стрелок приборов ПП-1ПМ, когда сигналы от датчиков равны нулю, положение щёток на потенциометрах жёсткой обратной связи R2 может оказаться не одинаковым. В этом случае при симметричном положении командных стрелок приборов ПП-1ПМ со щёток потенциометров обратной связи R2 в 3-ий канал блока БК-6 поступает ложный сигнал рассогласования (асимметрии) командных стрелок тангажа.Этот сигнал вызывает погрешность срабатывания сигнализации неисправности системы Путь-4МПА».
Для компенсации погрешности предусмотрена специальная схема регулировки асимметрии. Она представляет собой электрический мост, состоящий из резисторов R25, R26, R27, R28 и переменного резистора R23 (см. рис. 24). К одной диагонали моста подводится напряжение постоянного тока 27 В, а со второй снимается сигнал на одну из управляющих обмоток магнитного усилителя блока БВ-2.
Переменный резистор R23 позволяет регулировать величину и знак сигнала, снимаемого с моста. За счёт этого сигнала на входе магнитного усилителя блока БИ-2 компенсируется ложный сигнал асимметрии.
Резисторы R25, R27 обеспечивают необходимый предел и плавность регулировки.
Канал 4 блока БК-6, предназначенный для сигнализации о неисправности бокового канала системы «Путь-4МПА», работает аналогично каналу 3.
Блок реле БР-46А предназначен для коммутации сигналов, выдаваемых в систему Путь-4МПА». В блоке установлены реле, конденсаторы и резисторы.
Элементы блока (см. приложение 1) имеют следующие назначение. Конденсаторы С1 и С2 служат для сдвига фаз напряжения, подаваемого на двигатели М2 и М3 в приборах ПП-1ПМ. Конденсаторы С3—С6 сглаживают помехи. Конденсатор С9 служит для сдвига фаз (на 90°) напряжений возбуждения и управления двигателя М9 (КУР) прибора НКП-4, а резистор R28 — для понижения напряжения с 45 В (400 Гц) до 36 В.
Конденсаторы С10—С19 соединены группами и предназначены для улучшения динамических свойств следящих систем:
- С14, С15 — системы индикации δн;
- С10—С13 — система индикации δz;
- С16—С19 — система индикации ξ;
- проволочные резисторы R37—R41 составляют мост-приёмник сигналов крена;
- резисторы R44—R48 составляют мост-приёмник сигналов тангажа.
Резисторы Р29—Р34 обеспечивают обратную связь.
Резисторы R56, R61 определяют порцию сигнала производной рε, а R54, R55 — порцию основного сигнала ε.
- Реле Р4, Р8 срабатывают при включении тумблера СТУ на пульте БСУ-ЗП.
- Реле Р1, Р2 срабатывают при включении АЗС «Курс МП».
- Реле Р5, Р9 срабатывают в навигационных режимах «VOR.», «СРП», «Азимут».
- Реле Р4, Р8 своими нормально разомкнутыми контактами подготавливают цепь включения реле Р1, Р2
- Реле Р6 срабатывает при нажатии на кнопку-лампу «Глис.» на пульте БСУ-ЗП.
Через 50 с после нажатия на кнопку-лампу «Глис.» срабатывает реле Р7.
Резисторы R15, R16 определяют порцию сигнала истинного крена, поступающего в канал 5У-20Н.
Нормально разомкнутыми контакты реле Р1, Р2 разрывают цепь сигналов δz, δн с выхода 5-го и 6-го каналов У-20Н на двигатели М2, М3 прибора ПП-1ПМ, а нормально замкнутые контакты этих реле подключают фазы питания переменного тока на двигатели М2, М3, что обеспечивает развод командных стрелок.
Контакты реле Р1, Р2 подключают питание +27 В усилителя и вычислителя. Нормально замкнутые контакты реле Р6 подключают резисторы R18, R19, уменьшая порцию сигнала ε. Реле Р7 подключает резисторы R2, R3 уменьшая порцию сигнала ξ, а резисторы R57, R58 изменяют порцию сигнала ε. Резисторы R4, R5 определяют порцию сигнала - в режиме -. Определяют порцию сигнала ε:
- резисторы R22, R23 в режиме «СРП»;
- резисторы R26, R27 в режиме «Азимут»;
- резисторы R13, R14 в режиме «VOR».
Соединительная коробка СК-29И
Предназначена для электрических соединений агрегатов системы «Путь-4МПА». На основании коробки укреплено пять пластмассовых контактных колодок А, Б, В, Г, Д. Каждая колодка имеет 14 клемм, помеченных цифрами от 1 до 14.
В системе «Путь-4МПА-2» используется самолётная распределительная коробка Н-25.
БЛОК СВЯЗИ БС-3
Блок предназначен для связи системы Путь-4МПА» с автопилотом АП-6Е или АП-6ЕМ-ЗП. В блоке БС-3 сигналы постоянного тока заданного крена γз и команды по тангажу δн, сформированные в вычислителе В-12, преобразуются в сигналы частоты 400 Гц. Преобразованные сигналы с блока БС-3 поступают на мостовые схемы автопилота и за счёт их обеспечивается автоматическое управление заходом на посадку.
Блок связи БС-3 состоит из двух самостоятельных каналов:
- бокового;
- продольного.
Оба канала собраны по одинаковой схеме. Структурная схема бокового (продольного) канала блока БС-3 показана на (рис. 25).
Рис. 25 структурная схема блока связи БС-3
Сигнал заданного крена γз (команда по тангажу δн) постоянного тока подаётся на вход магнитного усилителя, где усиливаетс и преобразуется в сигнал переменного тока, который после усиления в полупроводниковом усилителе подаётся на двигатель М1 (ДГ-0,1ТА) электромеханического блока БЭ-1. Двигатель через редуктор перемещает:
- щётку потенциометра R1, запитанного постоянным напряжением 27 В;
- щётку потенциометра R2, запитанного напряжением 27 В 400 Гц;
- шкалу в положение, соответствующее величине выходного сигнала.
На выход магнитного усилителя с потенциометра R1 снимается сигнал жёсткой обратной связи. Сигнал переменного тока с потенциометра R2, пропорциональный заданному крену γз (команде δн), подаётся в автопилот АП-6Е или АП-6ЕМ-ЗП. Сигнал переменного тока с тахогенератора двигателя ДГ-0,1ТА, пропорциональной скорости его вращения, подаётся на вход полупроводникового усилителя в противофазе основному сигналу. За счёт этого осуществляется скоростная обратная связь, улучшая динамические свойства системы.
Боковой канал (электрическую схему блока БС-3 см. приложение 2) состоит из магнитного усилителя У5, полупроводникового усилителя У3 и электромеханического блока У1 (БЭ).
Магнитный полупроводниковый усилитель, составляют усилитель второго типа, рассмотренный ранее.
Электромеханический блок БЭ-1 состоит из отрабатывающего двигателя М1 (ДГ-0,1ТА) с редуктором, потенциометров R1, R2 и шкалы.
Сигнал γз с левого вычислителя В-12 подводится через штепсельный разъём Ш1 на контакты 3 реле Р6, а через контакты 4, 6 реле Р3 заряжает конденсатор С5. Сигнал γз с правого вычислителя В-12 подводится на контакты 2 реле Р6.
Боковой канал БС-3 включается лётчиком при заходе на посадку в точке 4-го разворота нажатием на кнопку-лампу «Курс» пульта управления БСУ-ЗП. При этом напряжение +27 В подаётся на реле Р3 и Р5 блока БС-3, которые срабатывают и контактами 10, 11 реле Р3 самоблокируется.
Контактами 1, 2 реле Р3 сигнал γз от левого вычислителя В-12 подаётся на управляющую обмотку магнитного усилителя У1. Одновременно контактами 4, 5 реле Р3 подключаются заряженный конденсатор С5 на другую управляющую обмотку, включённую встречно первой. Конденсатор разряжается через ограничивающий резистор R5 и управляющую обмотку. При этом на вход магнитного усилителя подаётся второй сигнал противоположного знака. В результате суммарный сигнал на входе магнитного усилителя нарастает плавно, по экспоненте, что обеспечивает плавный ввод самолёта в крен при выполнении 4-го разворота.
Контактами 7, 8 реле Р3, Р5 на потенциометр R2 подаётся напряжение +27 В 400 Гц, поступающее с АП-6Е или АП-6ЕМ-ЗП. Контактами 3 и 4, 6 реле Р5 этот потенциометр расшунтируется.
После усиления и преобразования сигнал γз подаётся на двигатель М1 блока БЭ-1, который через редуктор смещает щётки потенциометров R1 и R2. Сигнал постоянного тока с потенциометра R1 подаётся на одну из управляющих обмоток магнитного усилителя для осуществления жёсткой обратной связи, которая компенсирует сигнал γз. После согласования с потенциометра R2 в боковой канал автопилота подаётся сигнал γз переменного тока.
Механический упор ограничивает угол поворота оси блока БЭ-1 в пределах ±170°, что обеспечивает ограничение сигнала γз с потенциометра R2 в пределах ±20°.
Реле Р6 срабатывает от переключателя ЦГВ при установке его в положение «АП-ЦГВ пр.» своими контактами подключает в боковой канал сигнал γз с правого вычислителя В-12.
При нажатии на рукоятку «Разворот» пульта управления БСУ-ЗП напряжение +27 В подаётся на реле Р4 блока БС-3, которое контактами 3, 5 снимает с блокировки реле Р3 и Р5. Боковой канал выключается.
Продольный канал блока БС-3
Состоит из магнитного усилителя У-6, полупроводникового усилителя У4 и электромеханического блока У2 (БЭ-1).
Сигнал δн с левого вычислителя В-12 подаётся на контакты 3, 6 реле Р7, а с правого В-12 на контакты 2, 5, реле Р7.
Продольный канал блока БС-3 включается лётчиком при пересечении самолётом равносигнальной зоны глиссады нажатием кнопки-лампы «Глис.», расположенной на пульте управления БСУ-ЗП. При этом напряжение +27 В подаётся на реле Р1 и Р2, которые срабатывают и контактами 1, 2 реле Р2 самоблокируются. Контактами 1, 2 реле Р1 сигнал δн с левого вычислителя В-12 через резистор R13 подаётся на четыре последовательно соединённые управляющие обмотки магнитного усилителя. Контактами 4, 5 и 7, 8 реле Р1 потенциометр R2 подключается к мостовым схемам продольного канала автопилота АП-6Е или АП-6ЕМ-ЗП.
После усиления и преобразования сигнал δн подаётся на двигатель М1 блока БЭ, который через редуктор смещает щётки потенциометров R1 и R2 до тех пор, пока сигнал с потенциометра R1 не скомпенсирует на входе магнитного усилителя сигнал δн. При этом с потенциометра R2 в автопилот АП-6Е или АП-6ЕМ-ЗП снимается сигнал команды δн частоты 400 Гц.
Реле Р2 исключает одновременное включение двух режимов — «Глиссада» и «КВ», тпк как при его срабатывание контакты 4, 6 и 7, 9 разрывают цепь блокировки корректора высоты КВ-11.
Реле Р7 срабатывает при установке переключателя ЦГВ в положение «АП-ЦГВ пр.» и своими контактами 1, 2 и 4, 5 подключает в продольный каналБС-3 сигнал δн с правого вычислителя В-12.
При нажатии на рукоятку «»Спуск-подъём контактами этой рукоятки отключается напряжение — -27 В от реле Р1 и Р2 блока БС-3 и его продольный канал выключается.
Блок связи БС-3 питается постоянным напряжением 27 В и и переменным напряжением 36 В 400 Гц и 27 В 400 Гц от автопилота АП-6Е или АП-6ЕМ-ЗП.
Переменные резисторы R6, R7, R14, R31 в цепи обмоток смещения магнитных усилителей служат для их балансировки. С помощью этих резисторов выбираются дрейфы нуля командных стрелок левого и правого полукомплекта системы «Путь-4МПА».
При переключении ЦГВ («Путь-4МПА») срабатывают реле Р6, Р7 и своими контактами подключают к магнитному усилителю соответствующий регулировочный резистор.
Материалы
Орлов Г.В. «Путь-4МПА — Пилотажно-навигационная система» (повествование 26.12.2022).
[01] [02] [03] [04] [05] [06] [07]
Источник
https://ussr-cccp.moy.su/index/aviacija_sssr/0-10