(Результаты: роботы. «ХиЖ» 2023 №6)
Четвероногие роботы-собаки, а это туловище на четырех ногах с округлыми ступнями, давно не новость. Роботы с четырьмя ногами способны на многое, но есть серьезная проблема — они неустойчивы, до своих живых прародителей, например представителей семейства кошачьих, им далеко. Так, бегущий гепард на крутых поворотах помогает себе сохранить равновесие движением хвоста, а падающая кошка переворачивается в воздухе за счет гибкости позвоночника. Управляющие программы робота не согласовывают движения ног и туловища. Он устойчив, пока три его ноги касаются поверхности, но очень неустойчив — когда две или одна.
Этот недостаток решили устранить инженеры из Университета Карнеги Меллон под руководством профессора Закари Манчестера (Zachary Manchester). Они впервые разработали систему, которая позволяет почти любой серийной робособаке стать робокошкой, то есть не падать при сильном толчке или идти по узкой деревянной балке.
Инженерам помогли космические технологии. Это так называемые реакционные колеса с моторами, которые ориентируют спутники на земной орбите за счет гироскопического эффекта, а также их программное обеспечение. Блок из двух быстро вращающихся в перпендикулярных направлениях маховиков легко укрепить на спине большинства коммерческих роботов. Умная программа быстро изменяет угловой момент робота для возвращения устойчивости при выведении его из равновесия.
Профессор Манчестер сообщает, что исходные управляющие программы робособаки не пришлось сильно изменять. Математическую модель спутника просто интегрировали в стандартный серийный алгоритм. Теперь он учитывает гироскопные силы дополнительно к реакциям четырех опор.
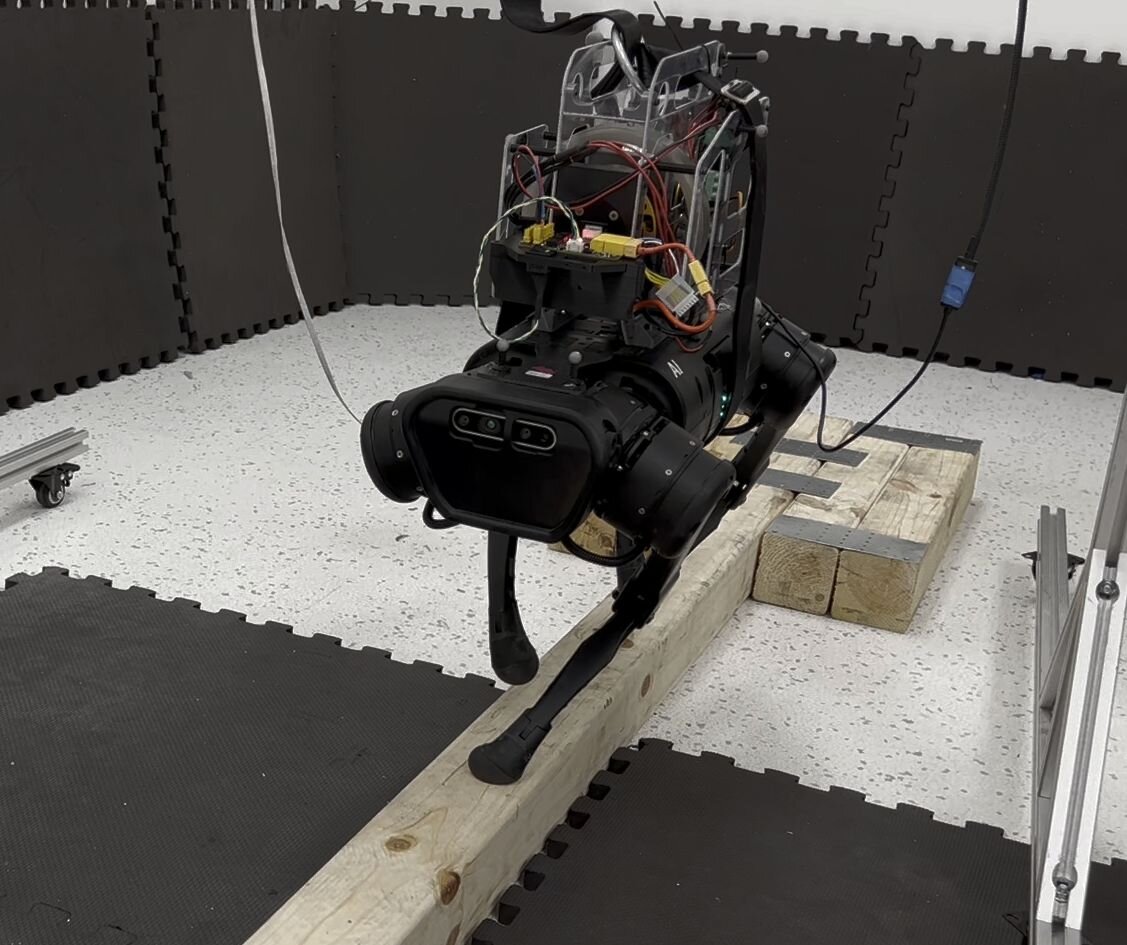
Тесты показали способность робота массой 4,3 кг сохранять устойчивость при внезапных выведениях из равновесия, например при ударах. Инженеры даже роняли его вверх ногами с высоты в полметра. Он переворачивался и падал на ноги. Также он ходил по бруску шириной в 6 см, что прежде было немыслимо. Видео этих экспериментов есть в Интернете.
Профессор предсказывает, что такие надежные друзья вскоре станут, подобно дронам, доступным коммерческим продуктом. Робокошек можно будет использовать в спасательных и поисковых операциях. И не только.
Сейчас инженеры работают над дальнейшим повышением устойчивости робота, надеясь достичь уровня животных.
И. Иванов
Остальные статьи из этой рубрики вы можете найти в подборке «Результаты: алгоритмы и роботы»
Канал автора: «Новости медицины»
Благодарим за ваши «лайки», комментарии и подписку на наш канал
– Редакция «Химии и жизни»