![Японская робомногоножка превращает свои недостатки в достоинства [ВИДЕО]](https://avatars.dzeninfra.ru/get-zen_doc/10384921/pub_647c1e7413036a1426dea64a_647c221f13036a1426df59ac/scale_1200)
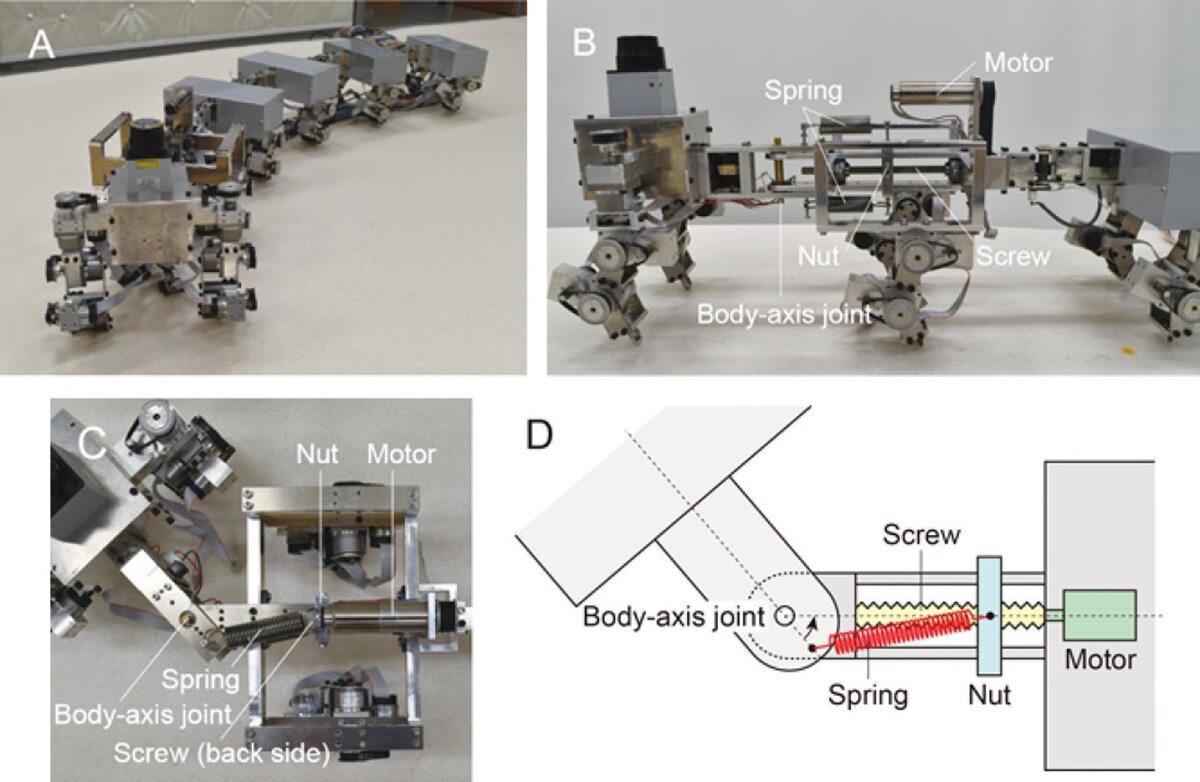
Исследователи из Университета Осаки в Японии разработали роботизированную многоножку с шестью сегментами, каждый из которых содержит две ноги и гибкие суставы. На этого 9-килограммого «монстра» конструкторов вдохновили, как бы банально это ни звучало, реальные многоножки.
При длине в 135 сантиметров робот сосредоточил в себе золотую середину между двумя крайностями — недостаток ног, сказывающийся на функциональности при непредвиденных ошибках, и большие вычислительные мощности, требуемые при большом количестве ног. У японского робота шесть сегментов, каждый из которых содержит две ноги и гибкие суставы. Дело в том, что повышение гибкости суставов приводит к «раздвоению вил», когда прямолинейная ходьба становится неустойчивой. И вместо того, чтобы исправить нестабильность, исследователи использовали её, позволив роботу ходить по изогнутой схеме, влево или вправо, как настоящая многоножка.
Таким образом, контроль гибкости оси тела робота значительно снижает вычислительную сложность и потребность в энергии, необходимой для движений робота. После тестирования робомногоножки учёные обнаружили, что она может добраться до цели по изогнутому пути. В будущем её будут проверять в более сложных условиях, например, на пересечённой местности.
Исследование было опубликовано в журнале Soft Robotics.