В этой статье разберёмся как можно сделать тактильную структуру поверхности. Для этого построим условную эргономичную рукоятку, и чтобы она лучше лежала в руке, сделаем её слегка некруглой. Для улучшения тактильной чувствительности добавим структуру, состоящую из небольших выступов. Моделирование будет не совсем поверхностным, а скорее гибридным - в основе будет лежать простая твердотельная модель.
Подготовка
Начнём построение модели. Создаём деталь. Строим эскиз на плоскости ZX.
Включаем параметрический режим, отображение ограничений и степеней свободы. Строим два вертикальных отрезка и горизонтальный между ними.
Накладываем ограничения и образмериваем их, как на рисунке. Выходим из режима эскиза.

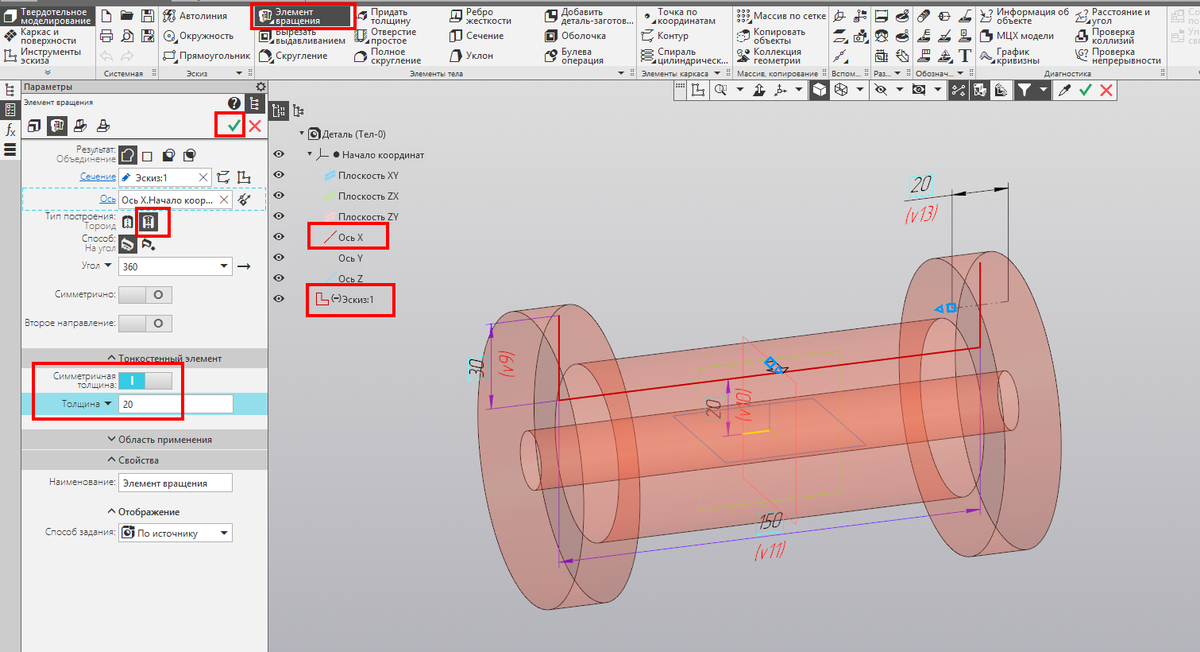
Запускаем команду «Элемент вращения». Указываем Ось X и построенный эскиз. Ставим тип построения Тороид. Включаем тонкостенный элемент, симметричную толщину. Задаём толщину 20 мм. Создаём объект.
Заготовка рукоятки готова.
Меняем форму
Создаём новый эскиз на плоскости ZX. Строим из начала координат квадрат со стороной 100 мм. Выходим из режима эскиза.
Переключаемся на набор «Каркас и поверхности», запускаем команду «Разбиение поверхности». Указываем захватную поверхность рукоятки и эскиз квадрата. Создаём объект.
Запускаем команду «Точка на пересечении». Строим точки на пересечении верхней части линии разбиения с плоскостью ZX.
Проделываем аналогичные действия с плоскостью XY.
Создаём новый эскиз на плоскости XY. Проецируем в него точки пересечения с этой плоскостью. Строим сплайн по полюсам из шести точек. Первая и последняя вершины должны совпадать со спроецированными точками. Накладываем ограничения и образмериваем, как на рисунке.
Зеркально отражаем сплайн относительно условной горизонтальной линии, проходящей через начало координат. Выходим из режима эскиза.
Создаём новый эскиз на плоскости ZX. Проецируем в него точки пересечения с этой плоскостью. Строим сплайн по полюсам из шести точек. Первая и последняя вершины должны совпадать со спроецированными точками. Накладываем ограничения и образмериваем, как на рисунке. Аналогично строим зеркальную копию сплайна. Выходим из режима эскиза.
Запускаем команду «Удалить грани». Указываем центральную часть захватной поверхности рукоятки. Убираем галочку «Сохранить целостность». Создаём объект.
В дереве появляется информация о нарушении целостности тела — не обращаем внимание, нам так и нужно, дальше исправим.
Запускаем команду «Поверхность по сети кривых». Последовательно указываем сплайны.
В направлении V указываем ребра разбиения. Активируем опцию «Замкнуть по V».
Для границ 2 и 4 задаём касательность с оставшимися частями захватной поверхности. Создаём объект.
Запускаем команду «Сшивка поверхностей». Указываем тело с нарушенной целостностью и поверхность. Создаём объект. Галочка «Создавать тело» стоит безальтернативно и загреена — в результате мы восстанавливаем тело с нарушенной целостностью.
В зависимости от порядка выбора объектов сшивки получившееся тело будет синим или серым, но в любом случае цвет можно изменить.
Строим тактильную структуру
Запускаем команду «Группа точек на поверхности».
Переключаем на способ «По сетке вокруг заданной точки». Указываем поверхность по сети кривых. Указываем параметры UV – 50/50%. Шаг по U ставим 9%, Шаг по V —11%. Включаем опцию «Учитывать границы». Создаём объект.
Запускаем команду «Плоскость через точку параллельно другой плоскости».
Указываем плоскость ZX. Указываем любую точку из группы точек по поверхности.
Создаём новый эскиз на параллельной плоскости. Проецируем в него точку пересечения. Строим из точки дугу радиусом 2 мм. Края дуги соединяем горизонтальным отрезком со стилем осевая. Из режима эскиза запускаем команду «Элемент вращения».
Создаём элемент вращения.
Запускаем команду «Массив по точкам».
Указываем элемент вращения, как исходный объект массива. Как точки указываем группу точек на поверхности. Создаём массив.
Получился такой результат
Попробуйте самостоятельно сделать вместо массива выпуклостей массив впадин.
Как поменять цвет поверхности