В прошлой статье мы разобрались как выбрать свой первый пульт для FPV, познакомились с ключевыми моделями и узнали про два способа удержания стиков в пальцах. Наверное теперь самое время подрубить свою новенькую аппу к компьютеру и начинать летать (падать) по бескрайним полигонно-шейдерным просторам симуляторов? Пожалуй, нет. Даже перед тем как поднять свою виртуальную машину в растровый воздух в первый раз, стоит потратить немного времени на изучение основ управления.

На пульте управления дроном у вас два стика – левый и правый. В традиционной раскладке M2 левый стик отвечает за газ (throttle) и вращение по вертикальной оси (yaw), а правый – за тангаж (pitch) и вращение по горизонтальной оси (roll). В раскладке M1 все наоборот – на левый стик назначены pitch и roll, а на правый – throttle и yaw. Подавляющее большинство пилотов пользуется раскладкой M2, то есть газ у них под левой кистью. Ниже мы будем разбирать все оси на примере раскладки M2, чтобы не запутаться. Обязательно посмотрите картинку перед тем как двигаться дальше.
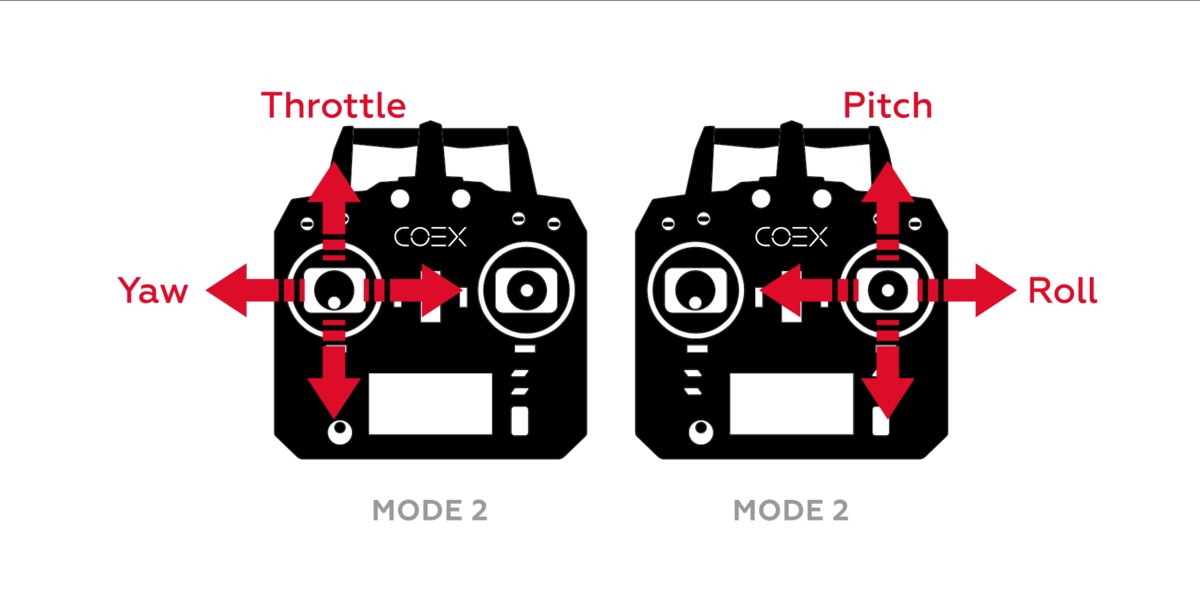
Throttle (газ) отвечает за мощность, подаваемую на моторы дрона, которая, в свою очередь, будет влиять на то с какой скоростью дрон будет лететь по заданному пилотом направлению (вверх и вниз – это тоже направление). Управление газом осуществляется с помощью стика throttle. При движении стика вверх дрон будет подниматься/быстрее лететь вперед или назад, а при движении стика вниз – спускаться/медленнее лететь вперед или назад (а потом упадет).
Yaw (рыскание, вот такой вот термин из авиации, да) отвечает за повороты дрона вокруг вертикальной оси. То есть дрон как бы поворачивает "голову" (на самом деле он поворачивается целиком) влево или вправо. Управление рысканием осуществляется с помощью отклонения левого стика влево или вправо. При движении левого стика вправо или влево дрон поворачивается соответствующим образом.
Roll (крен) отвечает за наклон дрона на правый или левый борт. При движении стика roll вправо или влево дрон не просто наклоняется, а начинает двигаться (дрейфовать) в соответствующем направлении, на месте он не останется, такова физика.
Pitch (тангаж) отвечает за наклон дрона вперед и назад по горизонтальной оси. Двигая стик вверх вы будете наклонять “нос” дрона вперед, заставляя его двигаться в этом направлении. Двигая стик вниз вы будете выравнивать дрон обратно в горизонтальное положение. Если не отпускать стик и продолжать двигать его вниз, то дрон начнет наклонятся задней частью и полетит назад.
Режимы дрона
Разобравшись какая ось за что отвечает, новоиспеченный FPV-пилот должен познакомится с режимами управления дроном. А что это вообще такое – управление дроном? Это передача команд со стиков на управляющую электронику коптера через радиопротокол. FPV-дроном можно управлять в режимах angle, horizon и acro. Однако, тру-FPV полет, который раскрывает все возможности – это управление дроном в режиме acro. Давайте разберемся в том как работают все три режима.
Angle – режим, в котором дрон наклоняется в соответствии с наклоном стика по выбранной оси. Его фишка в то, что стоит отпустить стик или пальцами вернуть его в нулевую позицию – и дрон сам возвращается в горизонтальный полет. Самостоятельно выравнивается, в общем. Именно так, кстати, устроено управление любым мавиком или фантомом. Чтобы бед не натворили.
Разберем пример. Отклоняем правый стик влево по оси roll, то есть двигаем его в сторону геометрического центра пульта. Дрон послушно наклоняется влево. Отпускаем стик из пальцев(там пружина) и дрон возвращается в горизонтальный полет.
Режим Angle — с гнильцой. Коптер не отдает себя во власть пилота, а лишь дает "подержатся за штурвал", не забывая страховать новичка его всю дорогу. В "англе" можно поворачивать, снижаться и подниматься, но ничего творческого у вас не получится. Нельзя перевернуть коптер и посмотреть на землю, нельзя банальнейше "флипнуть" на 360 (можно сказать, сальто), нельзя камнем полететь вниз. Пилот отпустил стик — и дрон сразу назад, в свой безопасный горизонтальный полет. Получается симулякр FPV — "смотрите, у меня FPV-дрон! Но делать ничего с ним нельзя". Мавик, по крайней мере, никого не обманывает, а суть та же.
"Ну и не нужны мне твои бочки и флипы, я дрифт буду на синелог снимать" — скажет кто-то с большим желанием зарабатывать на FPV-съемках, но без практического опыта. Разочарую — в angle mode дрон гораздо медленнее, "тупеее", отвечает на команды со стиков словно не выспался. Взять несущийся в заносе Mark II в таком режиме не получится.
Horizon – режим очень похожий на angle, но с неполной свободой действий. При неполном отклонении стика, дрон будет вести себя абсолютно так же как и в angle – возвращаться в исходную позицию при переводе стика в ноль. Однако, если в horizon-режиме вы отклоните стик до упора("прожмете" его), дрон сделает переворот по этой оси. Аналогично angle-режиму, дрон вернется в исходную позицию едва вы отпустите стик. В общем, виртуальный дядька-наставник все так же держит штурвал за вас, просто он чуть менее строгий.
Acro. В режиме Acro вы летаете на своём дроне без какой-либо помощи со стороны управляющей электроники. Каждое движение требует прямого ввода команд с вашего пульта. Если по-научному, то акро это режим, в котором дрон становится в угол, заданный стиком и в нем и остается. Если стик устанавливается обратно в ноль, дрон перестает вращаться по выбранной оси, но НЕ возвращается обратно. Чтобы вернуть дрон в исходную позицию, пилот должен сделать контрдвижение стиком.
Например, если вы отклоните стик ролла вправо, дрон наклонится вправо. После того, как вы отпустите стик, дрон продолжит наклонятся, то есть лететь вправо, в неизвестность. Новичков это вводит в ступор, особенно после долгих лет полета на мавиках. Чтобы остановить движение с наклоном вправо, необходимо отклонить стик влево (компенсировать вращение контр-импульсом, да-да). Если вы перестараетесь и отклоните стик влево слишком сильно, дрон теперь начнет наклонятся влево (ужасно, да?). А если вы дернете стик влево до упора, дрон просто начнет вертеться вокруг оси через левый бок как кура-гриль на вертеле.
Абсолютно точно, что angle и horizon режимы сильно проще в освоении, чем acro. При любой непонятной ситуации просто возвращай стик в ноль – и дрон выровняет себя сам. И все бы отлично, но про выполнение трюков в этих новичковых режимах можно забыть. Любой трюк напрямую связан с полной свободой действия стиками, а эта свобода есть только в acro. Попробуйте заставить дрон лететь вверх ногами в режиме angle или horizon – у вас ничего не выйдет. Поэтому, сильно увлекшись любым из двух описанных выше режимов вы приобретете мышечную память, набор рефлексов, которые будут мешать вам освоится в acro.
Совет прост – переключайтесь в acro режим после первых 3-4 часов полетов в симе и забывайте про все остальные навсегда. Отличных полетов!
Отправить автору на пару рам Quadmula Siren F5 Split