Думаю нужно немного рассказать что такое полетный контроллер!
Подписываемся! Предлагаем новые темы которые вы хотели бы увидеть!
Что такое полетный контроллер
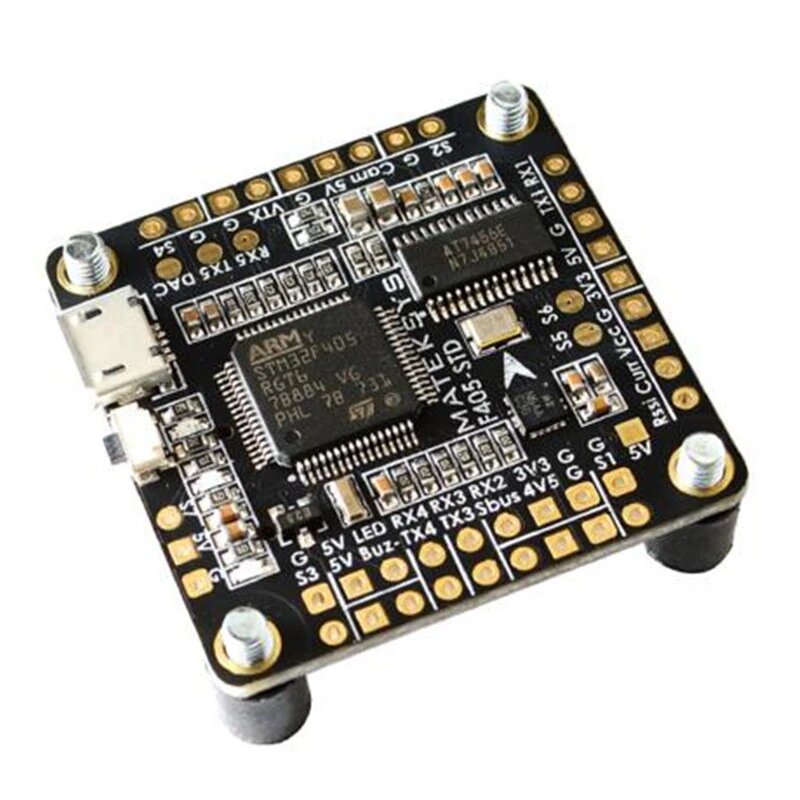
Полетный контроллер (контроллер, полетник) — устройство управления дроном. Это печатная плата, на которой размещены органы управления и датчики. На основе информации с датчиков контроллер регулирует скорость вращения моторов. Так он осуществляет контроль над полетом.
Основные функции
Каждый контроллер выполняет следующие задачи:
- сбор данных с датчиков;
- расчет собственного положения в пространстве;
- получение команд и внешних воздействий с пульта управления;
- отправка управляющих сигналов на регуляторы оборотов (ESC — electronic speed controller).
Контроллер управляет скоростью вращения моторов, подавая ШИМ-импульсы на регуляторы оборотов.
ШИМ (PWM) — широтно-импульсная модуляция. Это процесс управления мощностью методом пульсирующего включения и выключения потребителя энергии.
Скорость вращения моторов определяется длительностью ШИМ-импульсов, передаваемых с контроллера.
Направление и ход полета дрона определяются ручкой газа и вращением углов по трем плоскостям: крен, тангаж, рысканье (англ. — throttle, roll, pitch, yaw).
Направление меняется за счет разницы в скорости вращения разных моторов.
Полетник служит точкой подключения к дрону. Вся основная и дополнительная периферия подключается к нему. Помимо прочего, некоторые контроллеры могут обладать и другими функциями:
- удержание дрона на заданной высоте;
- автоматический полет по заданному маршруту;
- остановка или облет препятствий;
- автопосадка при потере сигнала.
Наличие специфических функций зависит от типа контроллера.
Виды полетных контроллеров
Квадрокоптеры можно условно поделить на три большие группы:
- Дроны для съемки фото и видео
- Дроны для автономных полетов
- Гоночные дроны
Каждому виду дронов соответствует свой специфический тип полетников.
Контроллеры для съемки фото и видео
Наиболее популярный сегмент. В таких контроллерах упор делается на максимальную стабилизацию и простоту использования.
Здесь чаще всего используются готовые решениям из коробки. Пользователю не нужно ставить прошивку, что-то настраивать и калибровать.
На подобных дронах может летать даже новичок без особой подготовки: датчики стабилизации все равно не дадут перевернуть дрон.
Контроллеры для автономных полетов
Дроны такого типа способны самостоятельно следовать по заданной траектории. Или же летать по заданным точкам.
Контроллеры для таких дронов дополнительно оснащаются датчиком GPS, компасом и барометром.
Контроллеры для гоночных дронов
Как правило, гоночные коптеры собираются вручную. Существуют и готовые наборы для последующей сборки. Однако настоящие энтузиасты (тем более профессионалы) предпочитают подбирать все компоненты самостоятельно.
Собранные вручную коптеры имеют характерный вид: плоская рама, видимые органы управления, наличие стяжек и термоусадок.
Есть отдельное направление пилотирования — фристайл. Оно подразумевает выполнение акробатических трюков в воздухе.
Коптеры для фристайла не сильно отличаются от гоночных. Часто на них можно заметить дополнительную экшн-камеру для съемки процесса фристайла в хорошем качестве.
Полетники для этих коптеров имеют минимальный набор функций и датчиков. Особенность фристайла и гоночного пилотирования — максимальный контроль дрона по всем плоскостям. Такой режим полета называется «акро». В нем дрон не стабилизируется автоматически: нужную траекторию по всем плоскостям пилот контролирует самостоятельно.
Большинство датчиков и некоторых стабилизирующих компонентов здесь либо отключаются вручную, либо вовсе отсутствуют за ненадобностью.
Процессор контроллера
Процессор — компонент, отвечающий за обработку данных и вычислительные операции. Прошивка устанавливается на процессор, и он же ее исполняет.
У процессора две основные характеристики: объем памяти и мощность.
Чем слабее мощность процессора, тем меньше он может обработать данных, поступающих с датчиков. Маленький объем памяти ограничивает установку современных прошивок, которые с каждым годом весят все больше.
Поколение процессораF1, F3, F4, F7
Мощность72 МГц72, МГц168, МГц216, МГц
Объем памяти128 кБ256 кБ1 МБ1 МБ
F1 и F3 — устаревшие поколения. Большинство современных прошивок их уже не поддерживают. Наиболее распространенные сегодня контроллеры оснащены процессором F4.
Датчики
К основным датчикам относятся акселерометр и гироскоп. Они есть на всех контроллерах.
Акселерометр измеряет ускорение дрона по трем плоскостям. С помощью этого устройства работает режим стабилизации, при котором невозможно в воздухе перевернуть коптер.
Гироскоп определяет угол наклона дрона.
К дополнительным датчикам относятся компас, барометр (датчик определения высоты дрона), различные датчики для определения препятствий (сонары, лидары, инфракрасные датчики).
Периферия
Периферия — дополнительные внешние устройства и их подключение. Сюда могут входить GPS, bluetooth, wi-fi, OSD, датчики тока, напряжения и другие.
GPS — спутниковая система навигации. Позволяет дрону летать на автопилоте по заданным маршрутам и возвращаться в точку посадки, если случатся неполадки и потеряется ручное управление.
Видеолинк — система передачи видеосигнала. Чаще всего применяется в формате полетов FPV (first person view — вид от первого лица), когда пилот в режиме реального времени управляет дроном. Пользователь ориентируется по изображению с камеры коптера. Видеопоток транслируется на монитор, планшет, смартфон, либо на экран специального устройства (шлем, очки).
OSD (On Screen Display) — система отображения дополнительной информации о полете на экран.
Регуляторы оборотов
Контроллер управляет моторами с помощью специальных регуляторов — ESC (electronic speed controller).
Как это работает? Контроллер подает напряжение на регулятор оборотов. Тот, в свою очередь, последовательно пускает ток на разные участки статора (неподвижная часть мотора). Так создается последовательная разница в магнитном поле, которая заставляет вращаться ротор (подвижная часть мотора).
Последовательность в подаче тока осуществляется через транзисторы, которые называются мосфетами (MOSFET — metal-oxide-semiconductor field effect transistor).
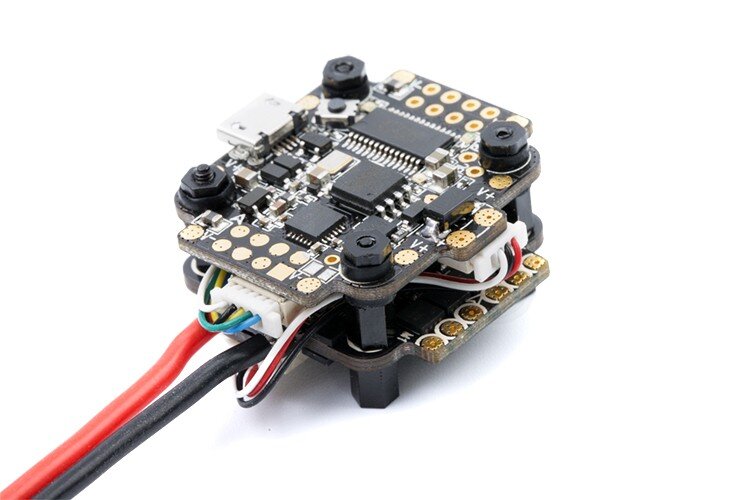
Регуляторы бывают двух видов:
- отдельные, по одному на каждый мотор;
- четыре в одном, размещенных на одной плате.
Последнему варианту все чаще отдают предпочтение: он отличается удобностью и компактностью размещения на плате.
Крепление контроллера к раме
В полете контроллер испытывает вибрации и шумы. Эти воздействия негативно влияют на показания некоторых датчиков. Их показания, понятное дело, искажаются — это может вызвать серьезные проблемы при полете.
Поэтому контроллер должен иметь смягчающие прокладочные материалы в местах крепления к раме.
Также антивибрационной профилактике подвергаются и моторы. Именно они — основная причина вибраций и шумов.
Что в итоге?
Полетный контроллер определяет сферу применения дрона. Разные модели ограничивают эксплуатацию в одних областях, но дают свободу в других. Иногда разбираться в тонкостях устройства полетника не нужно: из коробки вы получаете полностью готовый для полетов дрон. В других случаях от выбора контроллера будет зависеть многое. Особенно, если вы подбираете модель для гоночных полетов. Там по-настоящему важны характеристики и возможности дрона.