Аннотация. В данной статье описывается система виртуальной разметки, которая предоставляет безэкипажному судну информацию о безопасном
маршруте в районах интенсивного судоходства. Рассмотрены основные задачи, требования и принцип действия данной системы как на БЭС, так и на обычных судах.
Ключевые слова.Безэкипажное судовождение (БЭС), виртуальная
разметка, разграничивающая движение разметка, обеспечение безопасности маневрирования.
В районах интенсивного судоходства с помощью СУДС, которая
находится в акватории порта или проливе регулируется трафик акватории,
благодаря чему можно проложить маршрут для судов, который будет
отображаться как на карте, так и на устройствах дополненной реальности.
Говоря о безэкипажных судах, можно утверждать, что следить за такой картой будет некому, следовательно информация будет отображаться виртуально с помощью системы виртуальной разметки, которая представляет собой набор технических средств, обеспечивающих безопасное маневрирование при движении БЭС по заданному маршруту, входе/выходе в порт, швартовке. [1]
Система виртуальной разметки должна обеспечивать: [1]
- автономную, безопасную навигацию за счет предоставления
навигационной системе оптимальных маршрутов движения с
возможностью корректировки с учетом принятых и обработанных
данных об обстановке; - безопасность эксплуатации БЭС за счет повышения точности
навигации; - увеличение эффективности и пропускной способности
использования акватории при эксплуатации БЭС как на локальных маршрутах, так и при выполнении рейса, причаливании и
отчаливании за счет увеличения количества маршрутов в целевой
акватории; - достижение возможности создания структуры динамичных и
масштабируемых маршрутов, а также рекомендованных траекторий движения БЭС в зависимости от целевой обстановки окружающей среды. При этом должны быть учтены интересы традиционных
типов судов, участвующих в формировании навигационной
обстановки; - сокращение времени выполнения рейса и снижение экономических затрат на эксплуатацию БЭС за счет оптимизации траекторий
движения; - помощь и поддержка принятия решения путем наглядного
представления навигационной обстановки и уменьшения нагрузки на оператора ЦДУ.
Основной задачей системы является генерация маршрута и проводка по нему. Все начинается с регистрации в системе и запроса сервиса от БЭС, после этого у каждого судна будет свой заданный маршрут следования в данной акватории.
При подходе БЭС к регулируемой зоне по его запросу него строится
безопасный маршрут следования. Данный маршрут является некоторой полосой, по которому БЭС проходит с определенной скоростью.
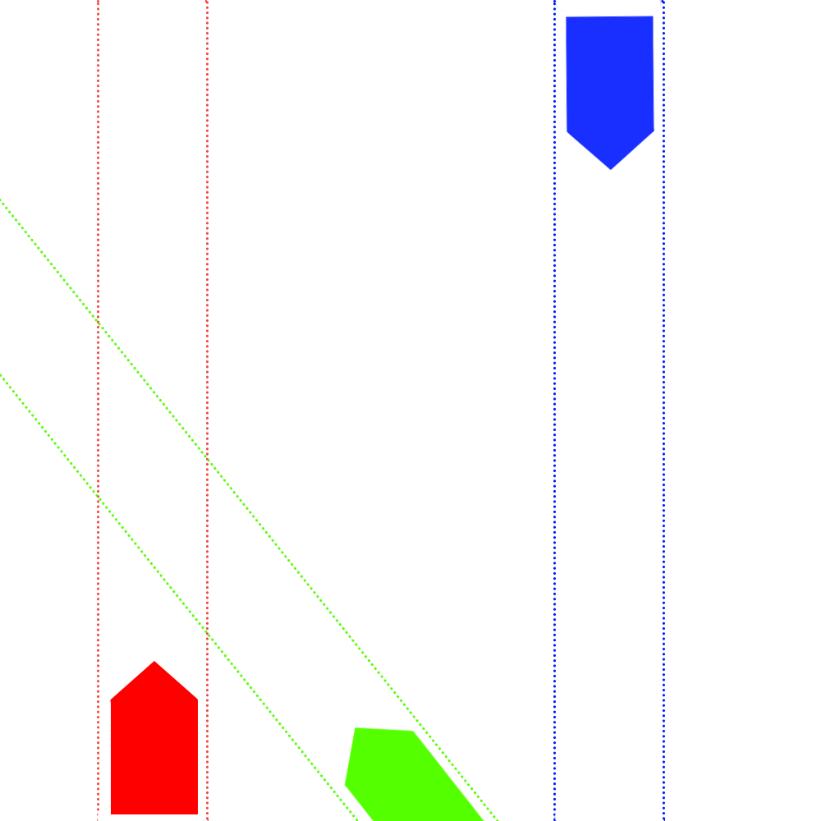
Рисунок 1 – Маршрут следования
Маршрут для только вошедших БЭС в зону акватории строится удаленно: на основании уже созданных и используемых в настоящее время маршрутов. Для каждой полосы существуют временные метки, с помощью которых отслеживается правильность движения БЭС, то есть судно должно подходить в определенное время к каждой точке. Стоит учитывать, что полоса имеет свои границы.
На рисунке 2 акватория условно размечена на полосы движения, по
которым движутся суда. У каждого судна своя полоса движения с возможностью отслеживания маршрута других судов.
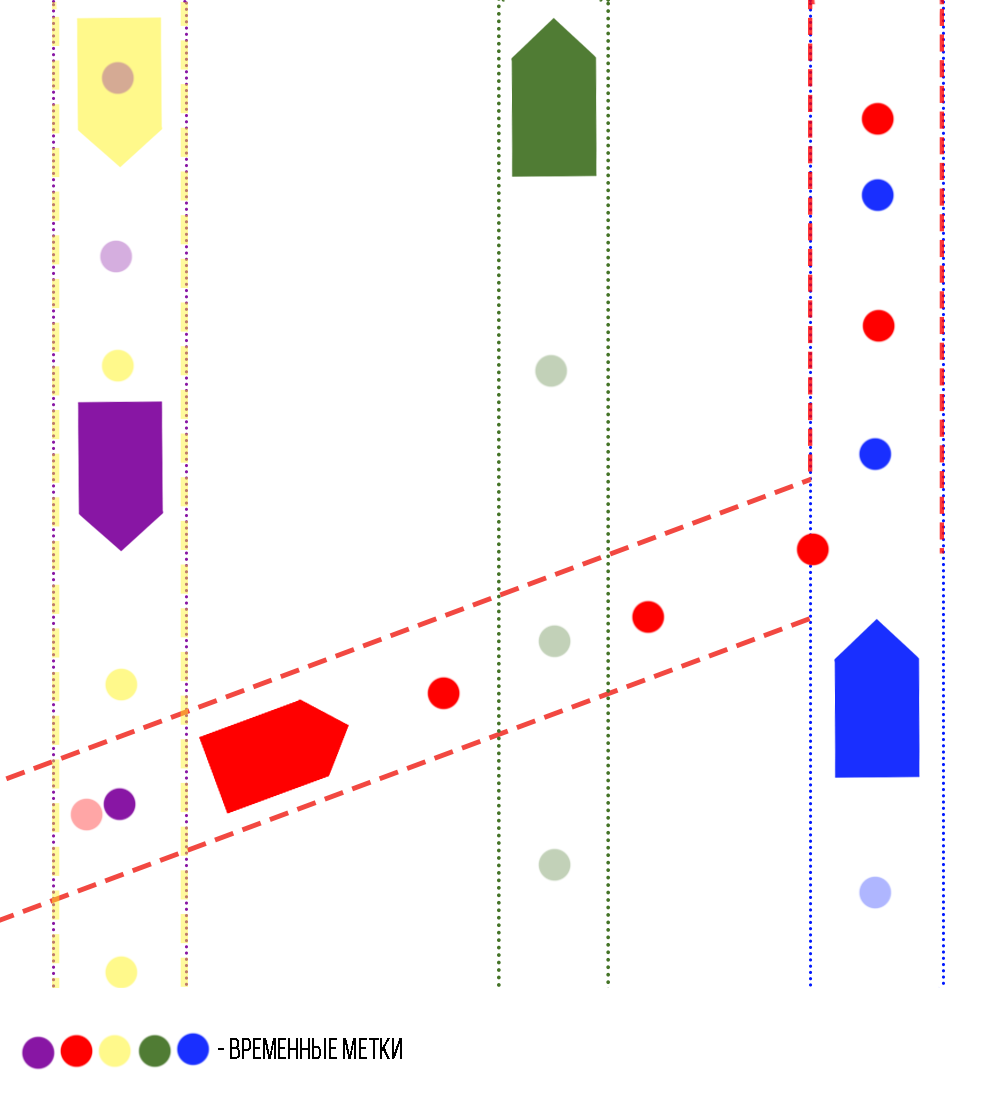
Рисунок 2 – Полосы движения судов
Важно понимать, что виртуальная разметка – динамическая. Это значит, что она может быть изменена в любое время, в зависимости от навигационной обстановки в акватории. Для безопасного мореплавания необходимо заранее с точностью нанести на виртуальную карту все известные морские опасности, по которым можно заблаговременно уклониться от встречи с опасностью, но для обеспечения полной безопасности этого недостаточно.
При планировании маршрутов судов, заходящих в акваторию портов или прилегающие к ним акватории, которые находятся под контролем СУДС и ЦДУ учитываются навигационные ограничения, такие как мелководье или опасности, погодные условия, а также запланированные маршруты других судов – с экипажем и без. В процессе движения по маршруту может возникнуть необходимость его изменения только в тех случаях, которые невозможно предусмотреть при планировании маршрута для судов.
Причинами незапланированного изменения маршрута БЭС или обычных
судов могут послужить аварийная остановка или потеря управления, а также другие случаи отклонения от маршрута. Соответственно в данной ситуации все суда должны изменить свои маршруты для избегания столкновения.
На рисунке 3 приведен пример возможного изменения маршрута для предотвращения столкновения судов.
Рисунок 3 – Возможное изменение маршрута для предотвращения
столкновения
Нередко бывает так, что следование судна по курсу становится
невозможным из-за резкого изменения погодных условий, таких как шторм, который может разыграться в самый неподходящий момент, штиль, вихрь, неустойчивость ветра и другие.
Система виртуальной разграничивающей движение разметки является неотъемлемой частью в эксплуатации автономных судов. Существует ряд
требований по управлению данной системой: [1]
- формирование виртуальной разметки должно осуществляться с
учетом эксплуатационных и маневренных характеристик БЭС; - система управления разметкой должна учитывать стандартные
траектории движения подхода к порту, отхода от порта; - система управления разметкой должна учитывать применимые
правила МППСС-72; - система управления разметкой должна учитывать горизонтальный профиль траектории движения БЭС, используя фактические и прогнозируемые навигационные данные;
- система управления разметкой должна выполнять прогноз как
минимум следующих параметров для каждой путевой точки маршрута действующего плана рейса БЭС:
- расчетного времени прибытия к путевой точке;
- расчетного времени выполнения рейса;
- расчетного пройденного расстояния;
- необходимых промежуточных путевых точек маршрута;
- вся прогнозируемая и фактическая информация системы управления разметкой должна отображаться в ЦДУ;
- система управления разметкой должна обеспечивать навигацию БЭС совместно с системой управления навигацией для выполнения плана рейса;
- формирование разметки должно осуществляться с учетом
применимых требований правила V/34 СОЛАС-74 и части 2 разд. А-VIII/2 Кодекса по подготовке и дипломированию моряков и несению вахты (Кодекс ПДНВ), а также резолюции ИМО A.893(21).
Виртуальная разметка, создаваемая береговым ЦДУ или СУДС,
отображается как на карте, так и на устройствах дополненной реальности. Для экипажных судов такая разметка формируется в виде синтетических или виртуальных объектов АИС.
Синтетические объекты передают сообщения от самой станции,
находящейся на расстоянии. Виртуальные же представляют собой временные ограничения определенных районов акватории или участков фарватера для обеспечения безопасного прохода БЭС. [2]
В данном случае разметка определяет виртуальные границы коридоров или зон, формируемых для прохода БЭС, которые нельзя пересекать. Иначе говоря, ЦДУ генерируют сообщения об условно созданных в акватории виртуальных ограждающих объектах, которые передаются по АИС. Что касается БЭС, подходя к регулируемой зоне, судно отправляет запрос на регистрацию в системе, после чего для него прокладывается маршрут в виде виртуальной разметки, который передается по специальным каналам в автоматическом режиме. БЭС должно следовать по сформированному маршруту – коридору, не пересекая его границы.
В этом заключаются теоретические принципы построения данной
системы. Для рассмотрения ее практической реализации еще предстоит
разработать конкретные технологии и протоколы для обеспечения безопасности и передачи информации на БЭС.
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
БЭС – безэкипажное судовождение.
ЦДУ – центр дистанционного управления.
АИС – автоматическая идентификационная система.
СУДС – система управления движением судов.
СОЛАС – международная конвенция по охране человеческой жизни на море.
СПИСОК ИСТОЧНИКОВ
1.Российский морской регистр судоходства, Положения по классификации морских автономных и дистанционно управляемых надводных судов (МАНС), 2020.
2.Европейская экономическая комиссия, Рабочая группа по унификации технических предписаний и правил безопасности на внутренних водных путях, Передача автоматической идентификационной системой (АИС) сообщений со средств навигационного оборудования на внутренних водных путях, 2015.