Инженеры разработали роботов, напоминающих многоножек, которые могут двигаться по сложной ухабистой местности. Исследования опубликованы в журналах Science и Proceedings of the National Academy of Sciences.
Исследователи из Технологического института Джорджии разработали новую теорию передвижения на нескольких ногах и создали модели многоногих роботов. Испытания подтвердили, что устройства с большим количеством дублирующих ног могут передвигаться по неровным поверхностям без дополнительных датчиков или технологий управления.
Исследователи разработала концепцию, описывающую передвижение, основанную на теории коммуникации математика Клода Шеннона. Они доказали, что добавление пар ног к роботу увеличивает его способность надежно перемещаться по сложным поверхностям — концепция, которую они называют пространственной избыточностью.
Эта избыточность обеспечивает успешное перемещение без необходимости использования датчиков для интерпретации окружающей среды. Если одна нога спотыкается, множество других ног заставляет устройство двигаться, несмотря ни на что. По сути, робот становится надежной системой для перевозки себя и даже груза из пункта А в пункт Б по сложным или «шумным» ландшафтам.
Перемещение многоногих роботов. Видео: Baxi Chong et al., Science
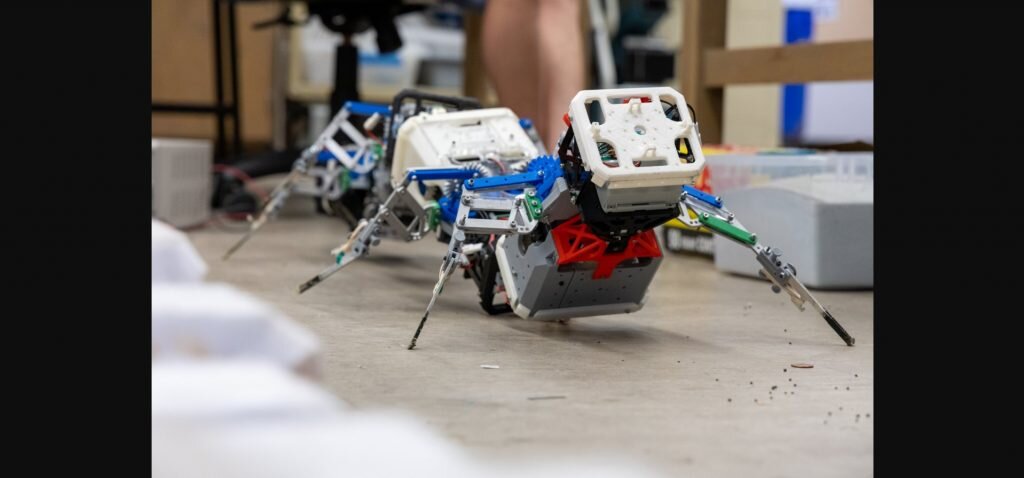
Руководствуясь этой концепцией, исследователи создали разных роботов, каждый раз увеличивая количество его ног на две: от шести до 16. По мере увеличения количества ног робот мог более проворно перемещаться по местности даже без датчиков, как и предсказывала теория.
В то время как двуногие и четвероногие роботы в значительной степени полагаются на датчики для перемещения по сложной местности, наш многоногий робот использует избыточность ног и может выполнять аналогичные задачи с управлением без обратной связи.
Джунтао Хэ, соавтор исследования
Для работы большинства классических роботов требуется большое количество датчиков. Но при выполнении сложных задач, например, спасательных робот, исследования Марса или микроскопических систем, восприятие робота зачастую ограничено. В таких условиях автономные роботы с множеством ног будут более успешными, считают инженеры.
Читать далее:
Ученые впервые увидели, как звезда пожирает планету: это, в итоге, ждет и Землю
Две суперземли нашли на краю обитаемой зоны: на одной из них комфортная температура
Современные люди мигрировали в Европу не так, как считалось ранее
Изображение на обложке: Georgia Tech