Исследователи из лаборатории робомеханики Университета Карнеги-Меллона представили два новых подхода, которые могут улучшить способность шагающих роботов передвигаться по пересеченной местности. Эти подходы вдохновлены врожденными способностями животных - мышечной памятью и механикой хвоста.
Исследователи из лаборатории робомеханики Университета Карнеги-Меллона представили два новых подхода, которые могут улучшить способность шагающих роботов передвигаться по пересеченной местности.
"Цель нашей работы - вывести шагающих роботов из идеальных лабораторных условий в реальную среду, где им придется ходить по неровностям почвы, лестницам и бордюрам", - говорит Янхао Ян, соавтор работы.
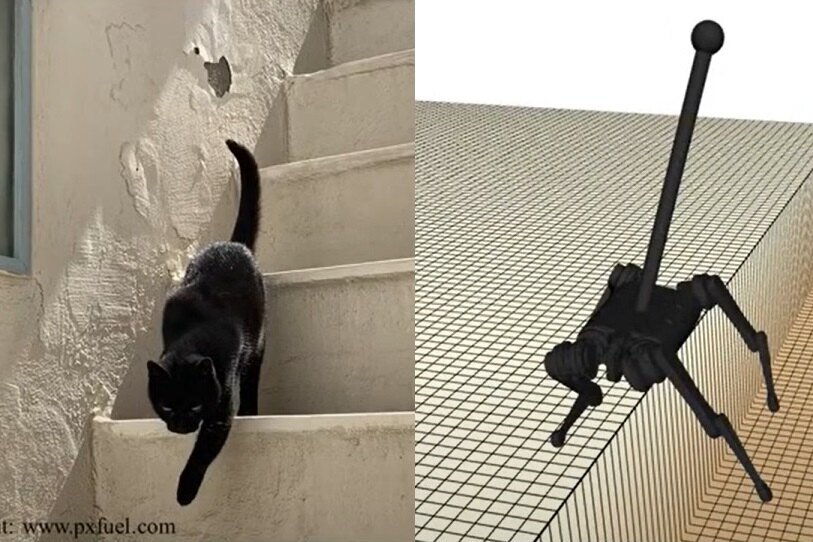
Многие животные, включая кошек, в сложных условиях пересеченной местности стараются ходить по собственным следам. Это позволяет им проще ориентироваться и сохранять устойчивость. Янг и его коллеги попытались воспроизвести это поведение в роботах, объединив методы проприоцепции и планирования движения.
Используемые учеными методы позволяют роботам "чувствовать" окружающую среду и двигаться более надежно, собирая информацию о действиях и местоположении собственного тела. Эта способность, известная как "проприоцепция", преодолевает ограничения систем компьютерного зрения, на которые негативно влияют шумы и препятствия в окружающей среде, отражение света и освещенность.
Животные и люди врожденно обладают проприоцепцией, однако большинство существующих роботов воспринимают окружающую среду, используя данные, полученные от систем машинного зрения. Вместо визуальной информации, которую собирают камеры, лидары и другие внешние датчики, Янг и его коллеги предлагают использовать данные, собранные датчиками, встроенными в робота, в основном это измерительные устройства, регистрирующие ориентацию и положение тела робота и его отдельных членов.
"Это поможет роботу, когда он поскользнется или упадет, скорректировать свои движения", - говорит Янг.
Главное - хвост
В дополнение к предложенной системе проприоцепции исследователи создали вычислительную модель, которая позволяет роботам управлять искусственным хвостом, подобно тому, как это делают животные.
"Мы заметили, что животные используют свои хвосты при передвижении, но у большинства роботов хвостов нет", - говорит Янг. - "Например, гепарды используют хвосты при быстром ускорении и на резких поворотах, а белки используют свои пушистые хвосты для балансировки при прыжках между ветками. Мы адаптировали эту идею, добавив хвост к нашим четвероногим роботам. Такой хвост помогает балансировать, когда робот теряет точку опоры".
Янг и его коллеги создали систему управления, которая позволяет искусственному хвосту робота работать в координации с его ногами, помогая сохранять равновесие, даже когда одна или несколько его ног отрываются от земли. Это может значительно улучшить движение робота по пересеченной местности или в узких коридорах.