
Согласно ГОСТ 22448-77, устанавливающим применяемые в науке, технике и производстве термины и определения основных понятий в области систем управления полетом, можно встретить следующее определение:
Система управления самолетом – комплекс устройств самолета, обеспечивающих устойчивость и управляемость его на всех этапах и режимах полета.
В процессе выполнения полёта экипаж летательного аппарата (ЛА) и автоматические системы управляют траекторией движения ЛА и ориентацией ЛА в пространстве относительно Земли. Можно выделить три основных объекта управления и три соответствующих контура управления:
- контур управления летательным аппаратом (навигация, пилотаж, конфигурация);
- контур управления силовой установкой;
- контур управления бортовым оборудованием.
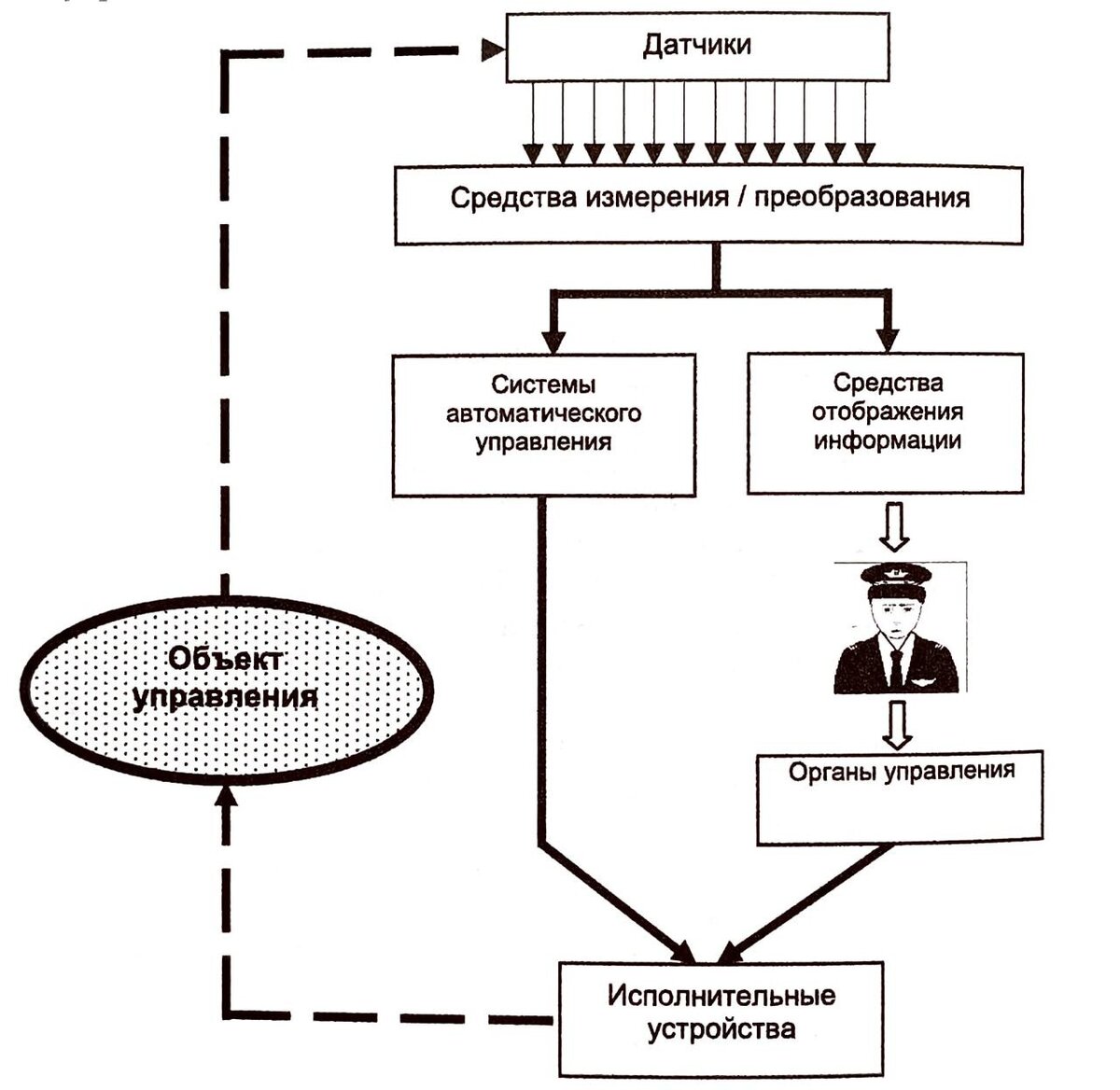
Контур управления в общем виде содержит (рисунок 1):
- датчики, преобразующие параметры объекта управления (а также окружающей среды) в электрические сигналы;
- средства измерения/преобразования сигналов, принимающие сигналы датчиков, определяющие по ним параметры и состояние объекта управления и выдающие эту информацию по бортовым интерфейсам всем нуждающимся в ней бортовым системам;
- средства отображения информации, осуществляющие представление измеренной и обработанной информации экипажу;
- органы управления (рычаги, пульты и т. п.), передающие команды экипажа на управление объектом;
- системы автоматического управления;
- исполнительные устройства, превращающие сигналы управления от экипажа и систем автоматического управления в физическое воздействие на объект управления (перемещение рулей, задвижек, клапанов, коммутация сети электроснабжения и др.).
Виды систем управления
В зависимости от степени участия в процессе управления человека системы управления могут быть неавтоматическими, полуавтоматическими, автоматическими и комбинированными.
Системы, в которых человек вырабатывает необходимые управляющие импульсы (сигналы) и посредством только своей мускульной энергии приводит в действие органы управления, обеспечивая этим самым изменение траектории движения ЛА в нужном направлении, называют неавтоматическими (рисунок 2). Такие системы включают: рычаги управления (РУ) – ручку или штурвал 2, педали 1, отклонением которых летчик вводит в систему управляющие сигналы и осуществляет их дозировку; органы управления (элероны 3, руль высоты 4, руль направления 5), отклонение которых в соответствии с управляющими сигналами (отклонением РУ) создает необходимые для изменения траектории полета силы и моменты; проводку управления, соединяющую РУ с органами управления.
Системы, в которых необходимые управляющие сигналы вводятся летчиком посредством отклонения РУ и в которых, кроме РУ, органов управления и проводки управления, имеется еще целый ряд механических, гидравлических и электрических устройств и силовых приводов рулей (бустеров), преобразующих управляющие сигналы в отклонение органов управления, называются полуавтоматическими. Эти системы облегчают летчику управление самолетом и повышают качество управления.
В автоматических системах управляющие сигналы формируются комплексом автоматических устройств (автопилотом или другими автоматическими системами, обеспечивающими в автоматическом режиме выполнение отдельных этапов полета, например, этап наведения и сопровождения цели, полет по заданному маршруту, заход на посадку и др.). Дальше эти импульсы, как и в полуавтоматических системах, преобразуются силовыми приводами в отклонение органов управления.
На современных самолетах чаще применяют различные комбинации этих систем управления. Так, например, на самолетах с небольшими дозвуковыми скоростями полета характерно применение неавтоматической системы управления в сочетании с автопилотом, освобождающим летчика от непосредственного управления самолетом при длительном полете.
Режимы управления
В зависимости от распределения функций управления ЛА между пилотом и автоматикой можно выделить автоматический, совмещённый, директорный, ручной режимы управления и режим стабилизации.
В автоматическом режиме управление ЛА осуществляют системы автоматического пилотирования (САП) без непосредственного участия пилота. Его функции заключаются в наблюдении за общей ситуацией, настройке автоматики перед включением автоматического режима и контроле её работы.
В режиме стабилизации САП выдерживают заданное значение параметра полёта. Задание параметра и включение или отключение режима стабилизации осуществляет пилот. Управление остальными параметрами полёта, кроме тех, по которым включен режим стабилизации, осуществляется самим пилотом. Стабилизируемыми параметрами могут быть курс, путевой угол, высота, приборная скорость, число М, вертикальная скорость, тяга двигателей, перегрузка.
В совмещённом режиме в управлении попеременно участвуют и пилот, и САП: пилот осуществляет маневрирование, а как только он прекращает выполнение очередного маневра, автоматика стабилизирует достигнутое в этот момент положение и скорость ЛА. Когда пилот двигает штурвал, управляет он, как только отпускает — САП. Для этого измеряются усилия, прилагаемые пилотом к рычагам управления или величины их перемещения.
В директорном режиме роль САП пассивная: выдача сигналов управления по крену, тангажу, высоте, скорости на пилотажный индикатор. Пилотирование осуществляет пилот, пользуясь при этом подсказками САП. Сигналы управления САП формируют по тем же алгоритмам, которые использовали бы сами, будучи подключенными к управлению.
В ручном режиме управление ЛА осуществляет пилот, а САП либо полностью отключены от управления, либо выполняют вспомогательные функции, облегчая ручное управление, предотвращая колебания и выход на недопустимые эксплуатационные режимы.
Состав и структура систем автоматического пилотирования (САП)
САП имеют иерархическую структуру и выполняют следующие задачи:
- обеспечение требуемых характеристик управляемости и устойчивости;
- передача команд от рычагов управления к рулевым приводам в виде электрических (световых) сигналов;
- непосредственное управление аэродинамическими силами, предотвращение критических режимов полёта;
- предотвращение критических режимов полёта;
- стабилизацию положения ЛА в пространстве и параметров его движения;
- выполнение запрограммированных маневров (выход на эшелон, приведение к горизонту, автоматическая посадка и т.п.);
- стабилизацию и программное изменение скорости полёта;
- целенаправленное управление траекторией с целью выполнения запрограммированного плана полёта.
Функционирование САП определяется законами управления. Закон управления – математическое выражение, устанавливающее связь между входными параметрами полёта, режимом полёта в качестве аргументов и выходными управляющими сигналами САП на исполнительные механизмы.
Все контуры управления САП устроены аналогично: в соответствующую систему автоматического пилотирования поступают заданное значение параметра полёта и измеренное датчиком текущее значение. По величине рассогласования между текущим и заданным значением вычисляется необходимое отклонение органа управления. При этом в закон управления обычно включаются не только сами параметры полёта, а также их производные: это позволяет быстро погасить колебания, вызванные перерегулированием.
Кучерявый А. А. Авионика: учебное пособие для вузов – СПб.: Лань, 2022. – 452 с.
Житомирский Г. И. Конструкция самолётов – М.: Машиностроение, 1995. – 415 с.