Сегодня начнем управлять электродвигателем ПЕРЕМЕННОГО тока.
Но сначала – как всегда – немного теории.
Чем отличается двигатель переменного тока от двигателя постоянного тока?
Надо понимать, что двигателей переменного тока множество, и даже двигатель постоянного тока (конструктивно) может работать от сети переменного тока. Посмотрите, как устроен двигатель электродрели, болгарки и других домашних инструментов. Это же конструктивно двигатели постоянного тока: есть коллектор, полюса…
Но самым распространенным двигателем переменного тока есть так называемый асинхронный двигатель с короткозамкнутым ротором.
А почему асинхронный? Да потому, что его ротор вращается не синхронно с магнитным полем, ротор отстает от магнитного поля… Хотя, может и опережать – тогда двигатель превращается в генератор (но об этом потом, уж очень серьезная и немного тяжелая тема)
А почему с КЗ ротором? Да потому, что есть АД с фазным ротором. Но это не сегодня.
Конструкцию АД (асинхронный двигатель) я сейчас подробно описывать не буду, в сети есть много подробных описаний. Напомню только, что сегодня нам надо регулировать частоту вращения ротора.
Это можно сделать несколькими способами:
- изменением сопротивления обмотки ротора (нам не подходит, у АД с КЗ ротором)
- изменением сопротивления в цепи обмотки статора (ну, это вообще даже не вчерашний, а позавчерашний день: любое сопротивление – это дополнительные потери, а мы затеяли всю эту историю с ШИМ ради снижения потерь и повышения качества регулирования.)
- изменением частоты питающего тока/напряжения. Вот это то, что нам надо!
Почему?
Для полноты картины надо вспомнить одну формулу:
Это зависимость частоты/скорости вращения магнитного поля статора (n) от частоты напряжения питания (f) и числа пар полюсов (p).
Число пар полюсов мы тоже менять не будем – это надо влезать в конструкцию обмотки статора. Будем менять частоту напряжения на обмотке статора.
Как меняется характеристика АД при изменении частоты напряжения/тока на обмотке статора показывает следующая характеристика:
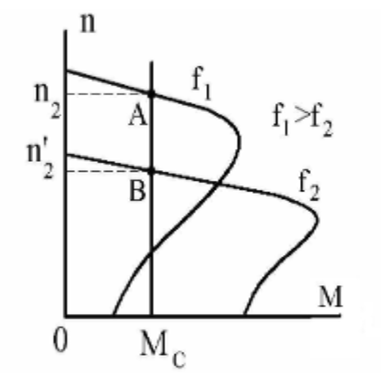
Рис 12.1
Это т.н «механическая характеристика» - зависимость частоты вращения ротора (n2) от момента нагрузки (М). Точка Мс – т.н. статический момент, т.е. нагрузка АД в статическом режиме (динамический, т.е. переходной режим рассматривать не будем, цель наша – научиться регулировать частоту, а потом и напряжение питания).
Для этого нужно вспомнить, что такое ШИМ
Рис 12.2
Меняя ширину импульса, мы меняем напряжение. Это было в предыдущих статьях. А вот как менять частоту?
Да очень просто! Нужно изменять длину тактов!
И об этом – в следующий раз!