
ЗАЧЕМ
Моторы на БПЛА (беспилотных летательных аппаратах) нужны для создания тяги, которая обеспечивает движение и управление аппаратом в воздухе. Они приводят в движение пропеллеры или другие движители, которые создают необходимую подъёмную силу и позволяют БПЛА взлетать, маневрировать и поддерживать заданную высоту.
КАКИЕ ТИПЫ МОГУТ БЫТЬ
На БПЛА могут быть установлены различные типы электрических моторов, включая:
Бесколлекторные (бесщеточные) моторы. Они обеспечивают высокую эффективность и надёжность, а также более длительное время работы от аккумулятора.
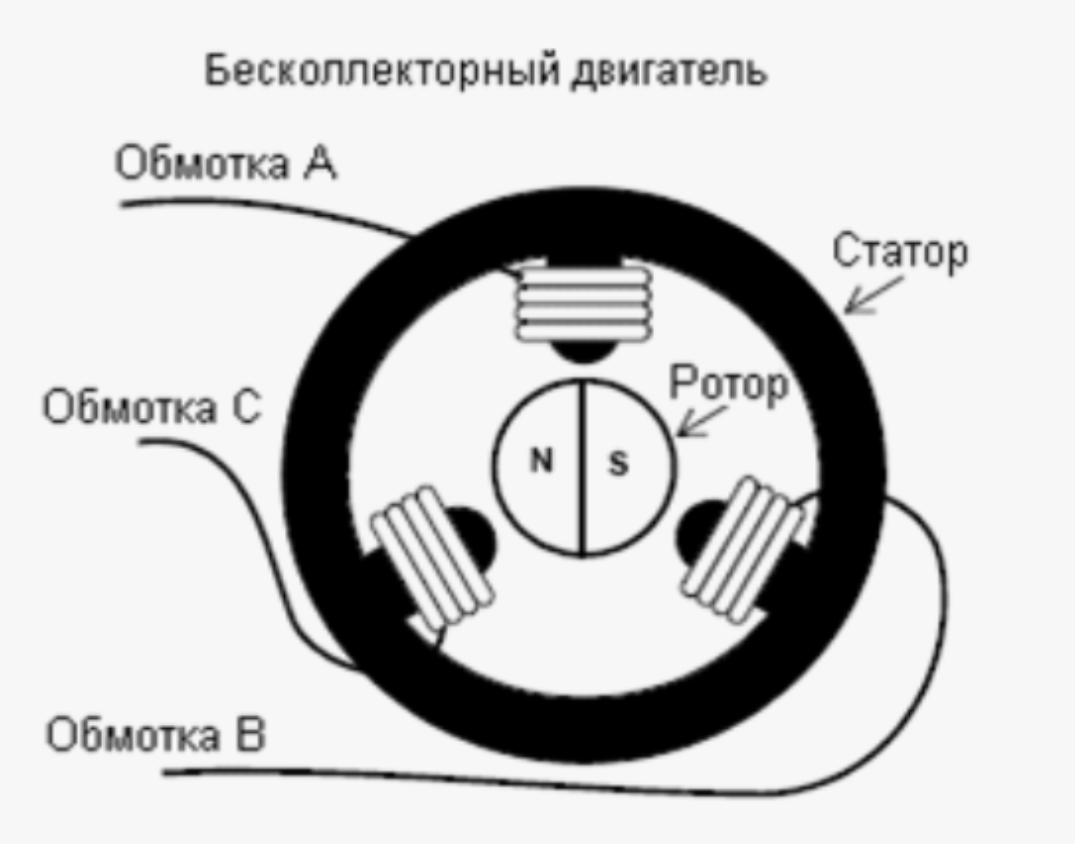
Бесщеточные двигатели: не используют щетки или коммутатор. Они используют электронную коммутацию с использованием датчиков и контроллера для переключения тока в обмотках двигателя, создавая вращающееся магнитное поле и генерируя движение.
Коллекторные моторы. Хотя они менее популярны из-за меньшей эффективности по сравнению с бесколлекторными, всё же могут использоваться в некоторых моделях БПЛА.
Коллекторный двигатель — это тип электродвигателя, в котором используются щетки и коммутатор для передачи электрического тока на якорь двигателя или обмотки катушки. Щетки физически контактируют с коллектором, обеспечивая протекание тока и создание вращательного движения.
Гибридные системы, сочетающие электрические моторы с дополнительными источниками тяги, например, с газотурбинными или другими вспомогательными двигателями (хотя такие системы менее характерны для БПЛА и чаще встречаются в более крупных беспилотных системах).
Выбор конкретного типа мотора зависит от требований к БПЛА, его назначению, весу, необходимой скорости и дальности полёта.
Маркировка
На наиболее часто используемых бесколлекторных моторах, мы можем встретить ряд обозначений
итак, что обозначает
- 2808 - это размеры корпуса двигателя и разбивается на 2 части; первые два числа – диаметр корпуса двигателя; последние 2 числа — высота. Этот код может быть в середине других букв и номеров моделей моторов, но его легко выделить, как отдельное 4-значное число.
В нашем случае, мы получаем:
28 мм – диаметр корпуса двигателя,
8 мм – высота корпуса двигателя.
- KV: 1300: KV устанавливает соотношение между вольтами и оборотами в минуту. Вообще, этот параметр измеряется без нагрузки, поэтому добавление пропеллеров (и шестерен) уменьшит фактические наблюдаемые обороты. KV – это хороший способ определить максимальные обороты, которые может достигнуть ваш двигатель.
Меньший KV означает больший крутящий момент, так что на каждый оборот будет тратиться больше энергии на вольт. Двигатель с высоким KV будет вращаться быстрее, но будет менее мощным. Может быть достаточно сложно найти идеальный двигатель для вашей сборки, поэтому мы рекомендуем начинать с рекомендуемой конфигурации.
В нашем случае, мы получаем:
KV1300 - двигатель будет вращаться со скоростью 1300 об/мин на вольт, приложенный к двигателю (что бы получить фактическую скорость, нам нужно умножить напряжение нашего АКБ на это значение).
Обратите внимание, при использовании разных АКБ , с разным значением напряжения (например 4S и 6S) фактическая скорость вращения двигателя будет изменяться !!!
Номинал KV двигателя является важной характеристикой.
Обратите внимание, когда пропеллер прикреплен к двигателю, частота вращения значительно падает из-за сопротивления воздуха.
Двигатели с более высоким KV пытаются вращать пропеллер быстрее, создавая увеличенную тягу и мощность (при этом потребляя больше тока). Напротив, двигатели с более низким KV обычно сочетаются с винтами большего размера, тогда как двигатели с высоким KV лучше работают с меньшими и легкими винтами.
KV двигателя определяется количеством обмоток из медного провода в статоре. Как правило, чем больше витков обмотки, тем ниже KV, а чем меньше витков, тем выше KV. Сила магнитов внутри двигателя также может влиять на значение KV, поскольку более сильные магниты имеют тенденцию увеличивать номинал KV.
Сочетание двигателя с высоким KV и слишком большого пропеллера может привести к перегрузке двигателя, поскольку он пытается вращаться на высоких скоростях. Повышенная потребность в крутящем моменте приводит к более высокому потреблению тока и выделению тепла. Перегрев может привести к расплавлению защитного покрытия катушек двигателя, что приведет к короткому замыканию и возможному перегоранию. Следовательно, двигатели с более высоким KV с большей вероятностью будут нагреваться сильнее, чем двигатели с более низким KV того же размера.
Номинал KV также влияет на пределы тока и напряжения двигателя. Двигатели с более высоким КВ обычно имеют более короткие обмотки и меньшее сопротивление, что снижает максимальное номинальное напряжение и увеличивает потребляемый ток для комбинации двигатель-гребной винт. Крайне важно обратиться к странице продукта двигателя для получения информации о допустимом напряжении и максимальном токе.
Еще нужно обратить внимание, что хотя в Betaflight можно настроить предел «Мощности двигателя», чтобы использовать батареи более высокого напряжения с двигателями с более высоким KV, этот обходной путь может потенциально перегрузить ESC и привести к проблемам. Обычно рекомендуется выбирать подходящие KV-двигатели для напряжения батареи, которое вы собираетесь использовать, а не полагаться на ограничение выходной мощности. Это обеспечивает совместимость и сводит к минимуму потенциальные проблемы.
УСТРОЙСТВО БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ
1. Статор двигателя: Статор двигателя представляет собой неподвижную часть двигателя. Он состоит из нескольких металлических катушек, обычно называемых обмотками. Провод катушки покрыт эмалью для предотвращения короткого замыкания, поскольку он тщательно намотан в многочисленные петли. Когда электрический ток протекает через эти катушки статора, он генерирует магнитное поле, которое взаимодействует с постоянными магнитами ротора, что приводит к вращательному движению.
2. Магниты: Постоянные магниты создают постоянное магнитное поле внутри двигателя. В двигателях FPV эти магниты надежно прикреплены к внутренней части колокола двигателя с помощью эпоксидной смолы. Магнитное поле, создаваемое этими магнитами, взаимодействует с магнитным полем, создаваемым катушками статора, способствуя вращению двигателя.
3. Колокол двигателя: Колокол двигателя служит защитным кожухом для магнитов и обмоток внутри двигателя. Колпак двигателя, обычно изготовленный из легких металлов, таких как алюминий, не только защищает внутренние компоненты, но и играет роль в охлаждении. Некоторые конструкции колоколов двигателей напоминают миниатюрные вентиляторы, которые стратегически направляют поток воздуха на обмотки двигателя, что помогает рассеивать тепло во время работы двигателя.
4. Вал двигателя: Вал двигателя соединяется с колоколом двигателя и служит основным компонентом, ответственным за передачу крутящего момента, создаваемого двигателем, на гребной винт. Пропеллер прикреплен к валу двигателя и приводится в движение силой вращения, создаваемой двигателем.
НА ЧТО ОБРАТИТЬ ВНИМАНИЕ
При выборе двигателя для Вашей сборки, нужно понимать и грамотно рассчитывать его параметры, с учётом всех компонентов:
рамы, контроллера полета (FC), электронного регулятора скорости (ESC), пропеллеров, приемника ( RX), видеопередатчика (VTX), антенн, батареи и другие. Лучше переоценить вес и иметь дополнительную мощность, чем иметь недостаточную мощность и бороться при взлете.
Чтобы точно оценить вес и размеры вашего дрона, следуйте следующим рекомендациям:
1. Оценка компонентов: подведите итоги всех компонентов, которые вы планируете включить в свой дрон FPV. Сюда входят такие основные компоненты, как рама, FC, ESC, двигатели, пропеллеры, RX, VTX, антенны и источник питания, которым обычно является литиевая батарея. Кроме того, рассмотрите возможность установки любого дополнительного оборудования, например камеры GoPro или других аксессуаров. Составьте подробный список, чтобы ни один компонент не был упущен из виду.
2. Оценка веса компонентов: исследуйте и соберите информацию о весе каждого компонента. Производители обычно предоставляют характеристики веса своей продукции, которые можно найти в списках продуктов, технической документации или на веб-сайтах производителей. Запишите эти веса для каждого компонента и сложите их, чтобы получить приблизительную оценку общего веса.
3. Учитывайте запасы безопасности. При оценке веса желательно учитывать запасы безопасности. Это означает добавление небольшого буфера к общему расчетному весу для учета любых непредвиденных отклонений, ошибок измерения или дополнительных компонентов, которые вы можете добавить в будущем. Обычно рекомендуется запас прочности около 10 %, но вы можете отрегулировать его в зависимости от ваших конкретных обстоятельств и предпочтений.
4. Оценка размеров: При оценке размеров вашего дрона учитывайте размер рамы, длину и диаметр пропеллеров, а также любые другие факторы, которые могут повлиять на общие размеры. Убедитесь, что рама подходит для размещения всех компонентов и обеспечивает достаточно места для правильного монтажа и подключения проводов.
Тщательно оценив вес и размеры вашего FPV-дрона, вы лучше поймете его возможности и характеристики. Кроме того, он поможет вам выбрать подходящие двигатели, аккумуляторы и другие компоненты, способные выдержать ожидаемую нагрузку. Помните, всегда предпочтительнее переоценить вес и иметь избыток мощности, чем столкнуться с трудностями при взлете из-за недостаточной тяги.
Определение требований к тяге вашего дрона
Расчет минимальной тяги, необходимой для комбинации двигателя и пропеллера вашего дрона, имеет решающее значение для обеспечения оптимальной производительности. Оценив общий вес вашего дрона, вы сможете определить подходящую тяговооруженность, необходимую для стабильного полета и маневренности. В этом подробном руководстве мы рассмотрим процесс определения требований к тяге и дадим рекомендации для различных типов дронов и стилей полета.
1. Оценка общего веса:
Для начала вам необходимо оценить общий вес вашего дрона. Учитывайте все компоненты, которые будут влиять на общий вес, включая раму, контроллер полета, электронный регулятор скорости, двигатели, пропеллеры, аккумулятор, камеру/подвес и любые дополнительные аксессуары. Получите данные о весе каждого компонента у производителя или через Интернет-ресурсы.
2. Практическое правило тяги:
Как правило, общая максимальная тяга, создаваемая всеми двигателями, должна как минимум вдвое превышать общий вес дрона. Эта рекомендация обеспечивает достаточную тягу для стабильного полета, а также обеспечивает маневренность и возможности отрыва. Недостаточная тяга может привести к плохой реакции управления и трудностям при отрыве дрона от земли.
Например, если расчетный вес вашего дрона составляет 1 кг, общая тяга, создаваемая всеми двигателями при 100% открытии дроссельной заслонки, должна составлять не менее 2 кг. Это означает, что каждый двигатель должен производить минимум 500 г тяги в конфигурации квадрокоптера. Имейте в виду, что наличие большей тяги, чем требуется, всегда выгодно, поскольку обеспечивает дополнительный запас мощности.
3. Соотношение тяги к весу для разных типов дронов:
Желаемое соотношение тяги к весу варьируется в зависимости от типа дрона и предполагаемого использования. Вот несколько рекомендаций:
- Гоночные дроны: для гоночных дронов высокое соотношение тяги к весу, часто называемое соотношением мощности к весу, имеет важное значение для быстрого ускорения и маневренности. В этой категории распространены коэффициенты 10:1 или даже 14:1, что обеспечивает высокую скорость и маневренность. Однако учтите, что более высокие передаточные числа могут затруднить управление дроном, особенно для новичков.
- Дроны для акробатики и фристайла: Для акробатических и фристайловых полетов рекомендуется соотношение тяги к весу не менее 5:1. Это обеспечивает хороший баланс между маневренностью и контролем, позволяя совершать впечатляющие маневры и перевороты, сохраняя при этом стабильность.
- Дроны для аэрофотосъемки: даже если вы планируете летать на медленной и стабильной установке для аэрофотосъемки, желательно иметь соотношение тяги к весу выше 3:1 или даже 4:1. Это обеспечивает лучший контроль и устойчивость даже в ветреную погоду и оставляет место для дополнительной полезной нагрузки, такой как камеры и подвесы.
4. Факторы, которые следует учитывать:
При выборе подходящей тяговооруженности учитывайте такие факторы, как навыки и опыт пилотирования. Более высокие коэффициенты обеспечивают большую маневренность и ускорение, но могут потребовать большей точности управления. Новичкам может быть сложно управлять возросшей мощностью, поскольку даже небольшая регулировка дроссельной заслонки может привести к быстрому подъему. Рекомендуется постепенно адаптироваться к более высокой тяговооруженности, чтобы избежать аварий и обеспечить безопасный полет.
Кроме того, более высокая тяговооруженность позволяет вашему дрону справляться с неожиданными ситуациями, такими как внезапные порывы ветра или необходимость быстрых маневров, обеспечивая буфер безопасности для управляемого полета.
ХАРАКТЕРИСТИКИ ДВИГАТЕЛЯ (НА ЧТО ВЛИЯЕТ)
Увеличение ширины или высоты статора приводит к увеличению объема статора, включая размер постоянных магнитов и электромагнитных катушек статора. Это увеличение объема напрямую влияет на крутящий момент двигателя. Благодаря статору большего размера двигатель может вращать более крупные и тяжелые пропеллеры на более высоких скоростях, создавая повышенную тягу. Однако такое повышение производительности достигается за счет увеличения потребления тока и недостатка более крупного и потенциально более тяжелого двигателя. Кроме того, статоры большего размера имеют тенденцию быть менее отзывчивыми из-за их повышенной инерции.
При выборе размера двигателя крайне важно найти баланс между требованиями к крутящему моменту, желаемой тягой и отзывчивостью. Для обеспечения оптимальной производительности необходимо учитывать такие факторы, как вес и размер вашего дрона, предполагаемые летные характеристики и требования к мощности.
Понимание тонкостей размера двигателя и его влияния на производительность двигателя имеет основополагающее значение для выбора подходящего двигателя для ваших конкретных потребностей. Тщательно учитывая ширину и высоту статора и их влияние на крутящий момент, тягу, вес и отзывчивость, вы можете принять обоснованные решения для повышения общей производительности и эффективности вашего дрона.
Сравнение более высоких и широких статоров: факторы, которые следует учитывать
При анализе статоров двигателя важно изучить влияние ширины и высоты на производительность двигателя. Здесь мы исследуем различия между более высокими и широкими статорами, учитывая их отзывчивость, возможности охлаждения, мощность и эффективность.
1. Быстродействие:
Более широкие статоры обладают большей инерцией из-за увеличенного расстояния массы от оси вращения. В результате этим двигателям требуется больше энергии для изменения числа оборотов, что делает их менее чувствительными по сравнению с более узкими и высокими статорами с тем же объемом статора и выходным крутящим моментом. Повышенная инерция может повлиять на маневренность и маневренность, особенно в скоростных гонках или дронах для фристайла.
2. Охлаждение:
Более широкие статоры обеспечивают лучший потенциал охлаждения благодаря большей площади поверхности сверху и снизу. Эффективное охлаждение имеет решающее значение для поддержания производительности двигателя. Поскольку двигатели нагреваются во время работы, их способность генерировать магнитный поток снижается, что влияет на эффективность и крутящий момент. Увеличенная площадь поверхности более широких статоров позволяет улучшить рассеивание тепла, способствуя более эффективному охлаждению и поддержанию оптимальных характеристик двигателя.
3. Мощность:
Ширина статора может влиять на размер магнитов на колоколе двигателя. Более широкие и короткие статоры часто имеют меньшие магниты на колоколе, что потенциально влияет на выходную мощность двигателя. Магниты меньшего размера могут привести к незначительному снижению мощности по сравнению с более узкими и высокими статорами. Важно учитывать требования к мощности, исходя из желаемой тяги и конкретного применения двигателя.
4. Эффективность и долговечность:
Более широкие статоры позволяют использовать подшипники большего размера, что может положительно повлиять на эффективность, плавность хода и долговечность двигателя. Увеличенный размер подшипника повышает стабильность и снижает трение, способствуя повышению общей производительности двигателя. Эффективная и плавная работа может привести к увеличению срока службы двигателя.
Важно отметить, что статоры большего размера не всегда лучше. В некоторых случаях использование значительно более широких или тяжелых двигателей может не дать заметных преимуществ или даже привести к снижению отзывчивости из-за увеличения веса. Учитывайте требования к размеру, весу и крутящему моменту гребного винта, чтобы обеспечить наилучшую производительность для вашей конкретной установки. Если вам необходимо повысить производительность без увеличения веса, подходящей альтернативой могут быть двигатели с более высоким КV.
Крутящий момент двигателя
Крутящий момент двигателя играет решающую роль в производительности и отзывчивости FPV-дронов. Двигатели с высоким крутящим моментом имеют ряд преимуществ, в том числе более быстрое время отклика, более быстрое изменение оборотов, снижение колебаний пропеллера и более высокую общую производительность. В этом разделе мы исследуем факторы, влияющие на крутящий момент двигателя, а также соображения, которые необходимо учитывать при выборе двигателя на основе требований к крутящему моменту.
Факторы, влияющие на крутящий момент двигателя:
1. Размер статора (объем):
Размер статора, измеряемый по объему, является ключевым фактором при определении крутящего момента двигателя. Размер статора рассчитывается по формуле объема цилиндра, которая учитывает радиус и высоту статора. Как правило, больший объем статора приводит к более высокому крутящему моменту. Для примера сравниваем мотор 2207 с объёмом статора 2660.93 на мотор 2306 с объемом статора 2492.85, у мотора 2207 крутящий момент больше.
2. Материалы:
Тип используемых магнитов и качество медных обмоток также влияют на крутящий момент двигателя. Высококачественные магниты и хорошо спроектированная медная обмотка способствуют эффективной генерации крутящего момента.
3. Конструкция двигателя:
Различные аспекты конструкции двигателя, такие как воздушный зазор между статором и магнитами, количество полюсов двигателя и другие конструктивные особенности, могут влиять на выходной крутящий момент. Двигатели с оптимизированной конструкцией могут обеспечить улучшенные характеристики крутящего момента.
Соображения при выборе двигателя по крутящему моменту:
1. Объем статора по сравнению с Весом:
При сравнении двигателей важно учитывать как объем, так и вес статора. Если два двигателя имеют одинаковые объемы статора, обычно предпочтительнее более легкий двигатель, при условии, что другие факторы остаются равными. Выбор более легкого двигателя помогает снизить общий вес и повысить маневренность дрона. Однако важно найти баланс между требованиями к весу и крутящему моменту в зависимости от конкретного применения.
2. Особенности применения:
Требования к крутящему моменту двигателя зависят от предполагаемого применения и стиля полета. Для легких дронов, которым не требуется много газа, чтобы оставаться в воздухе, могут быть достаточны двигатели с меньшим крутящим моментом. В сочетании с винтами с меньшим шагом эти двигатели могут вращать их с меньшим крутящим моментом, что приводит к повышению эффективности. В таких случаях можно выбрать меньшие и более легкие двигатели, чтобы снизить общий вес дрона.
3. Скорость реагирования:
Следует отметить, что двигатели с высоким крутящим моментом могут быстро менять частоту вращения, что потенциально приводит к рывкам и менее плавной работе. В ситуациях, когда плавность хода имеет приоритет над немедленным реагированием, выбор двигателя с немного меньшим крутящим моментом может обеспечить более плавный полет. Кроме того, двигатели с высоким крутящим моментом могут создавать больше скачков напряжения и электрических шумов в энергосистеме. Обеспечение оптимальной фильтрации шума имеет решающее значение для устранения потенциальных проблем с производительностью гироскопа и колебаний полета, вызванных электрическими шумами.