Датчик электронный - устройство (сенсор), наделённое физическими свойствами получать определённые сигналы и реагировать на сигнал или стимул. Стимулирующие сигналы определяются воспринимаемой мерой, свойством или состоянием. По сути, имеет место транслятор, преобразующий неэлектрическое значение в электрическую величину. Выходной сигнал при этом может иметь форму напряжения, тока, заряда.
Датчик это разнообразие аппаратных свойств
Датчик электронный отличается многообразием форм электрических входных и выходных свойств. Здесь если отмечается пусть даже малое смещение измеряемой величины, одновременно проявляется смещение величины электрического выхода. Эти смещения определяются посредством измерительных функций. Все электронные датчики (сенсорные элементы) классифицируются по критериям:
- применения,
- используемых материалов,
- технологий производства.
Некоторые виды датчиков классифицируются также по характеристикам:
- стоимости,
- точности,
- рабочему диапазону.
Разработаны два типа электронных датчиков: пассивный и активный. Пассивный тип не требует дополнительного источника энергии. Электрический сигнал здесь вырабатывается непосредственно в ответ на воздействие внешних источников. Датчик это фактически преобразование входной энергии в энергию выходного сигнала.
Примерами пассивных датчиков можно отметить разработки:
- фотографические,
- тепловые,
- электрического поля,
- химические,
- инфракрасные,
- сейсмические.
Другой тип электронного датчика – активный, требует внешних источников энергии для формирования отклика (сигнала возбуждения). Активный датчик это также параметрический сенсор, учитывая физические свойства, которые изменяются в ответ на внешнее воздействие. Эти свойства впоследствии допускают преобразование в электрические сигналы.
Датчик это определённый механизм изменения сигнала
По типовому исполнению сенсорные элементы разделяют ещё и по свойствам обнаружения или механизму изменения - аналоговый и цифровой. Тут свойства обнаружения характеризуются как:
- электрические,
- магнитные,
- физические,
- химические и т. д.
Механизм изменения включает преобразование входного сигнала в выходной сигнал. Аналоговые сенсоры производят аналоговый выходной сигнал, т. е. непрерывный выходной сигнал относительно измеряемой величины.
Цифровой сенсорный элемент противоположен по свойствам аналоговому типу, обладает дискретными характеристиками и цифровым выходом, соответственно. Наконец, датчики это ещё и разделение приборов по обнаруживающим свойствам.
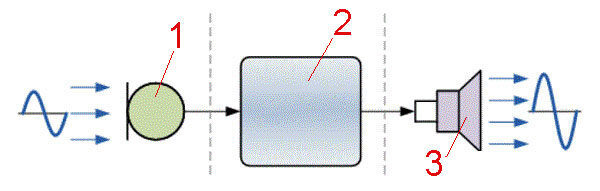
Входной стимул датчика это выходные данные, полученные в результате нескольких этапов преобразования, прежде чем формируется электрический сигнал. Работа сенсорных элементов описывается с точки зрения взаимосвязи между входными и выходными сигналами. Датчик это также характеристики в зависимости от значений некоторых важных параметров.
Функция передачи сенсорного элемента
Передаточная функция показывает взаимосвязь между физическим входным сигналом (s) и электрическим выходным сигналом (S):
S = f (s);
где: S - это реакция датчика на стимулы.
Эта функция может быть линейной или нелинейной в зависимости от отношения между входом и выходом. Нелинейность может проявляться различными формами функции:
- логарифмическая,
- экспоненциальная,
- степенная.
В большинстве случаев отношения определяются одномерной функцией. То есть отношение между выходом и входом связано одним стимулом. Эта линейная зависимость описывается следующим образом:
S = a + b * (s);
где: a - точка пересечения, используемая выходным сигналом при нулевом входном сигнале, b - крутизна, также именуемая чувствительностью (S). Линейная зависимость также определяется свойствами датчиков - амплитудой, частотой, фазой. Другие нелинейные функции:
S = a + b ln s; (Логарифмическая).
S = a * eks; (Экспоненциальная).
S = a + (a1 * sk); (Мощности).
Не все сенсорные элементы удовлетворяют указанным выше свойствам. В таких случаях требуется полиномиальная аппроксимация более высокого порядка.
Максимальный сигнал входа/выхода датчика что это?
Максимальный сигнал на входе элемента определяется как разница между максимальным и минимальным значениями входного стимула. Эта разница, как правило, представлена в децибелах (дБ). Кроме того, разница вычисляется логарифмическим измерением отношения мощности или силы к напряжению. Децибелы рассчитываются как равные 20-ти кратному логарифму силы, тока или напряжения:
1дБ = 20 log (s2/s1);
где: s2 и s1 - максимальное и минимальное значения входных данных.
Максимальный сигнал на выходе указывает на изменения между максимальным и минимальным значениями электрических выходных сигналов, когда применяется максимальное и минимальное входное воздействие. Максимальный сигнал на выходе также включает все отклонения от идеальной передаточной функции.
Точность и калибровка сенсорных элементов
Точность определения видится важной характеристикой датчиков. Характеристика эта рассчитывается с точки зрения погрешности измерения и определяется как разница между измеренным значением и истинным значением. Результат представлен в виде процента от полной шкалы или процента от показаний.
Ао = Из – Пз;
где: Ао - абсолютная ошибка; Из - измеренное значение; Пз - правильное значение.
При этом правильное значение (Пз) рассчитывается как среднее значение бесконечного числа измерений, тогда как относительная ошибка рассчитывается как:
Оо = Ао / Пз;
Рейтинг точности указывает на совокупный эффект вариации, линейности, калибровки, воспроизводимых ошибок, зоны нечувствительности и т. д. в процессе измерений датчиков.
Разработано множество датчиков, но чтобы получить наилучший прибор с оптимальным значением точности, необходима калибровка устройства, где сенсор предполагается использовать. Имеется в виду регулировка (набор регулировок), выполняемых на сенсоре или устройстве для обеспечения точной и безошибочной работы устройства. Например, требуется измерять давление с точностью ± 5 Па, но имеющийся датчик рассчитан на точность ± 10 Па.
Допустимо использовать такой датчик давления? Вполне, но здесь требуется калибровка. В процессе калибровки необходимо выяснить начальную передаточную функцию прибора. Также метод калибровки предусматривает выяснение конкретных переменных величин.
Эти переменные величины описывают полную передаточную функцию, соответственно требуют идентификации перед калибровкой. Калибровка линейных устройств рассчитывается по уравнению, когда переменные (а) и (b) определяются с высокой точностью.
Линейная передаточная функция рассчитывается как:
v = a + b * (p);
Чтобы найти константы «a» и «b», на датчик следует подать два значения давления (p1 и p2) относительно соответствующих выходных напряжений (v1 и v2). Получается результат:
v1 = a + b * (p1);
v2 = a + b * (p2);
Константы же вычисляются как:
b = v1 – v2 / (p1 – p2);
a = v1 – (b * p1);
Калибровочное давление вычисляется как:
p = v – (a / b);
Ошибка калибровки актуальна для типа неточности, которую производители принимают в процессе калибровки устройств или датчиков на заводе. Полученная погрешность неоднородна и допускает изменения в процессе калибровки.