Авторы статьи: Сусликов Э.В., Фаляхов И.В., Ш.Ш. Биктимеров, Мифтахов И.И. (АО «НИИтурбокомпрессор им. В.Б. Шнеппа», Группа ГМС) Котунов В.В., Красноперов А.В., Логинов С.Ю. (ООО «ВЭЛМА»)
Мировым общепризнанным лидером по производству систем АМП является фирма SKF (Франция). АО «НИИтурбокомпрессор» имеет большой опыт применения АМП производства фирмы SKF на проектах ЦКУ и ТДА. Стоит отметить и отечественных производителей АМП это АО «Корпорация «ВНИИЭМ», ПАО «Газпром автоматизация», АО "РЭП Холдинг», которые успешно внедряли системы АМП в проектах ГПА, однако до последнего времени не имели опыта внедрения для ТДА.
После ухода компании SKF с рынка РФ, была вызвана необходимость создания отечественной системы АМП для ТДА, не уступающей импортным аналогам. В связи с этим была поставлена задача в максимально короткие сроки создать отечественный аналог АМП для ТДА, не уступающий иностранным образцам, с последующим созданием рабочего образца. В качестве основного поставщика АМП бала выбрана фирма ПАО «Газпром автоматизация», а в качестве альтернативного разработчика фирма ООО «ВЭЛМА», которая в рамках НИР также должна была создать рабочий образец и провести испытания АМП в составе ТДА.
В 2022 г. была открыта тема НИР по разработке и изготовлению опытного образца комплекта активных магнитных подшипников для ТДА.
Цель НИР: Создание полнокомплектных активных магнитных подшипников с механическими деталями и узлами, а также шкафом управления магнитными подшипниками. АМП должны быть разработаны и изготовлены на высоком техническом уровне, соответствующем наиболее передовым достижениям техники и технологии.
В рамках НИР планировалось разработать и изготовить электромагнитные подшипники в картриджном исполнении с привязкой к имеющейся сменной проточной части и шкаф управления магнитными подшипниками аналогично разработке фирмы SKF. АМП должны быть конкурентоспособными с другими отечественными разработками по данной тематике.
Работы по данной НИР курировались специалистами АО «НИИтурбокомпрессор им. В.Б. Шнеппа».
НИР с ООО «ВЭЛМА» планировалось выполнить в нескольких этапах:
- обсуждение требований ОЛ и обмен опытом разработки и эксплуатации систем АМП;
- получение и согласование конструкторской документации от разработчиков;
- изготовление на производственных базах поставщиков образцов АМП с промежуточными испытаниями и отладки технологии изготовления;
- сборка и наладка систем на производственной площадке АО «Казанькомпрессормаш»;
- проведение испытаний систем АМП;
- анализ результатов испытаний систем АМП.
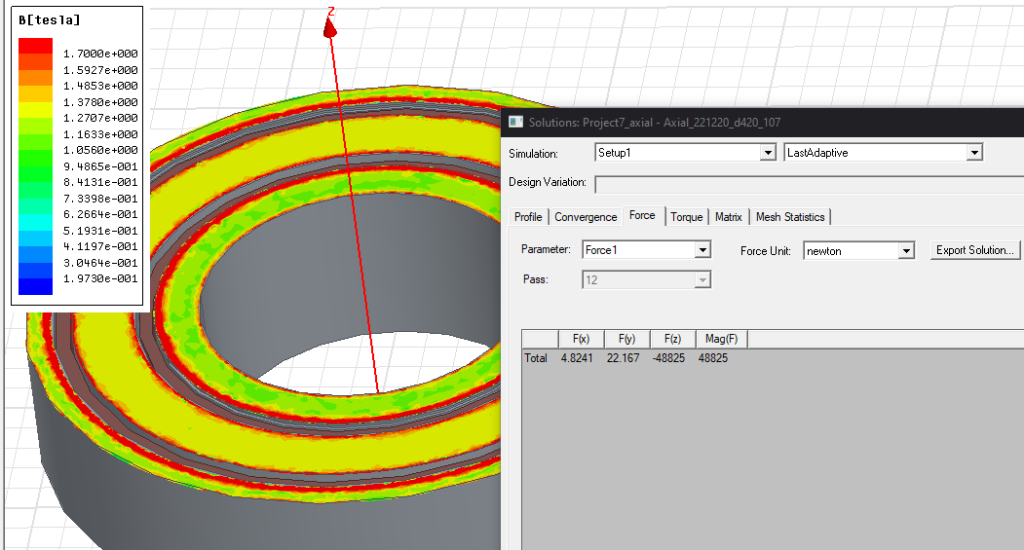
Исходными данными для проектирования были габаритные размеры и определенные технологическим процессом нагрузочные характеристики. Так было определено максимальное усилие в осевом направлении 45000Н, в радиальном 6000Н на каждый электромагнит. Исходя из данных условий проведены расчеты геометрии электромагнитов и обмоточных данных.
Важным этапом проектирования является проверка аналитических расчетов компьютерным моделированием методом конечных элементов. Это позволяет не только проверить расчеты, но и получить более полные данные, например, учет всех геометрических особенностей электромагнитов, неравномерность распределение магнитных полей, возможное насыщение некоторых участков магнитопроводов и т.д. Результаты компьютерного моделирования осевого и радиальных магнитов представлены на рисунке 2.
При проектировании роторов на АМП важным оказывается значение изгибных колебаний ротора. Если частота вращения достигает частоты изгибных колебаний возникают резонансные явления, которые влияют на систему управления и могут привести к потере устойчивости АМП. Поэтому большинство роторов проектируются исходя из условия работы на докритических скоростях вращения. Этого можно добиться за счет изменения ряда факторов: материала, геометрии, компоновки, технологии изготовления ротора. В нашем случае также проводился расчет критической частота минимальных изгибных колебаний ротора, которая составил 404,3 Гц, что превышает максимальную частоту вращения с достаточным запасом. Модель ротора для расчета изгибных колебаний представлена на рисунке 3.
Следует обратить внимание на то, что анализ методом конечных элементов позволяет задавать как свойства материалов, так и контактные взаимодействия между составными частями, что позволяет определять резонансные частоты с достаточной степенью точности.
По результатам расчетов были спроектированы и изготовлены 2 модуля, содержащих 2 радиальных (по двум осям), 1/2 осевого АМП (действующего в одном направлении), индуктивные датчики положения, датчик скорости и страховочный подшипник (рис. 4).
Страховочные подшипники обеспечивают выбег ротора до его полной остановки в случае аварийного сбоя в системе управления, а также удерживают его при отключении АМП. Между внутренним кольцом подшипника и страховочной втулкой вала имеется зазор в 0,18 мм, поэтому в нормальном режиме работы АМП они не вращаются. В качестве подшипника применен радиально упорный шарикоподшипник с керамическими шариками, не требующий смазки.
Для АМП неотъемлемой частью является система управления, которая должна соответствовать спроектированной электромеханической части. Главным образом блок управления должен обеспечить корректное управления токами электромагнитов, датчики положения должны обладать достаточной чувствительностью и быстродействием. Используя имеющиеся наработки, был спроектирован шкаф управления магнитным подвесом (рис. 5), исходя из соответствующих токовых нагрузок.
На лицевую панель выводится основная информация о состоянии АМП, кроме того по аналоговым каналам 4-20 мА и цифровому каналу Modbus TCP данные по положению, виброперемещению, удлинению, частоте вращения ротора, температурам, токам электромагнитов передаются на систему автоматического управления верхнего уровня. Управлять системой АМП возможно либо с панели оператора, либо дистанционно используя САУ верхнего уровня.
Система управления также имеет следующие функции:
- отображение орбит вращения ротора;
- возможность снятия частотных характеристик;
- ведение журнала событий.
Структурная схема системы АМП представлена на рисунке 6.
Важной особенностью данной системы управления является алгоритм компенсации дисбаланса ротора при его вращении на высоких скоростях. Данный алгоритм позволяет ротору самоцентрироваться относительно собственной оси инерции при минимальных токах, которая при наличии дисбаланса полностью не совпадает с геометрической осью. При этом необходимым является определения мгновенного значения угла поворота вала. Угол определяется с помощью датчика скорости. После включения алгоритма компенсации дисбаланса регулятор не реагирует на синхронные с оборотной частотой колебания, а отрабатывает только общее смещение вала. Это позволяет снизить токи в электромагнитах, уменьшить виброперемещения ротора, вибрации статора. Экспериментальные графики перемещений ротора до и после включения алгоритма компенсации дисбаланса представлены на рисунке 7.
По горизонтальной оси отложено время, по вертикальной – смещение ротора в мкм: красный по оси «а», желтый по оси «b», зеленый по оси «с», синий по оси «d».
Измерения положения ротора производятся встроенными индуктивными датчиками собственного производства и передаются на экран панели шкафа управления. Включение алгоритма компенсации дисбаланса происходит на скорости 4000 об/мин. Как видим, после включения алгоритма компенсации уменьшается виброперемещение.
Следует отметить, что по мере накопления опыта в проектировании и изготовлении АМП разрабатываются собственные методики проведения расчетов, математического и компьютерного моделирования. Возможность изготовления непосредственно активных магнитных подшипников и электронной системы управления на одном предприятии позволяет подходить комплексно к решению поставленных задач. При этом и АМП, и электронная системы управления, и программное обеспечения являются полностью собственной разработкой. Это позволяет предлагать продукцию для решения широкого круга задач, сократить сроки изготовления и гибко реагировать на запросы заказчика.
После изготовления и наладки проводились испытания АМП двух образцов, изготовленных ПАО «Газпром автоматизация» и ООО «ВЭЛМА», в составе турбодетандерного агрегата МТДА-15,1-5,6-МП УХЛ1 на стенде испытательного комплекса АО «Казанькомпрессормаш» совместно с сотрудниками АО «НИИтурбокомпрессор им. В.Б. Шнеппа» и представителями поставщиков АМП (рис. 8).
Целью стендовых испытаний являлось подтверждение основных параметров, указанных в техническом задании на систему АМП (Таблица 1).
Таблица 1. Основные технические параметры ТДА для проектирования АМП
Испытаниям подвергались АМП в составе СПЧ турбодетандерного агрегата со штатной трубопроводной обвязкой, в сборе с корпусами компрессора и турбины, с приводом соплового аппарата, стендовой (с элементами штатной) системой автоматизации (штатные первичные датчики).
Результаты испытания подтвердили расчетные зависимости и продемонстрировали соответствие показателей АМП требованиям ТЗ во всех режимах работы.
Экспериментальные исследования полностью подтвердили корректность расчётных моделей теоретической части НИР и позволяют с уверенностью говорить о возможности участия в проектах по поставке ТДА различного назначения и сложности, с широким диапазоном по параметрам применения.
Выводы
- Разработаны и успешно апробированы основные технические решения по проектированию и применению АМП в ТДА
- Спроектированная система АМП обеспечивает высокий уровень эффективности в диапазоне её применения на уровне известных мировых аналогов, по следующим показателям:
- качество управления;
- технологичность производства;
- энергопотребление;
- используемые интерфейсы, ПО и компонентная база;
- применение дополнительных возможностей, обусловленных наличием системы управления АМП.
3. Подготовлена теоретическая основа для дальнейшего проектирования турбодетандерных агрегатов на АМП.
4. Экспериментально подтверждены методики расчета, моделирования, проектирования.
5. На основе полученных результатов может быть сформирован типоразмерный ряд модулей АМП для ряда ТДА разработки АО «НИИтурбокомпрессор».
6. Создано и испытано два рабочих образца АМП в большинстве своём не уступающие по характеристикам современным импортным аналогам.
Опыт создания АМП и результаты НИР в дальнейшем будут использоваться для проектирования современных компрессорных и энергетических систем, что позволяет выйти на новый уровень создания эффективной отечественной детандерной, компрессорной, энергетической и другой техники в нашей стране.
Таблица 2. Краткое сравнение исполнений АМП
Список литературы:
- Ю.Н. Журавлев. Активные магнитные подшипники: Теория, расчет, применение. СПб. Политехника, 2003. – 206 с.
- Э.В. Сусликов, А.В. Андрианов, В.А. Максимов. Анализ динамики валопровода стенда газодинамических испытаний малорасходных ступеней ЦК // Проектирование и исследование компрессорных машин: Сб. науч. трудов под ред. докт. техн. наук, проф., АН РТ И.Г. Хисамеева, вып.6\ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа», Казань, 2009. – 422 с.
- Экспериментальные исследования ряда модельных турбинных ступеней: Отчет о НИР / АО НИИтурбокомпрессор им. В.Б. Шнеппа,. - №4500-23. — Казань, 2021. — 89 с.