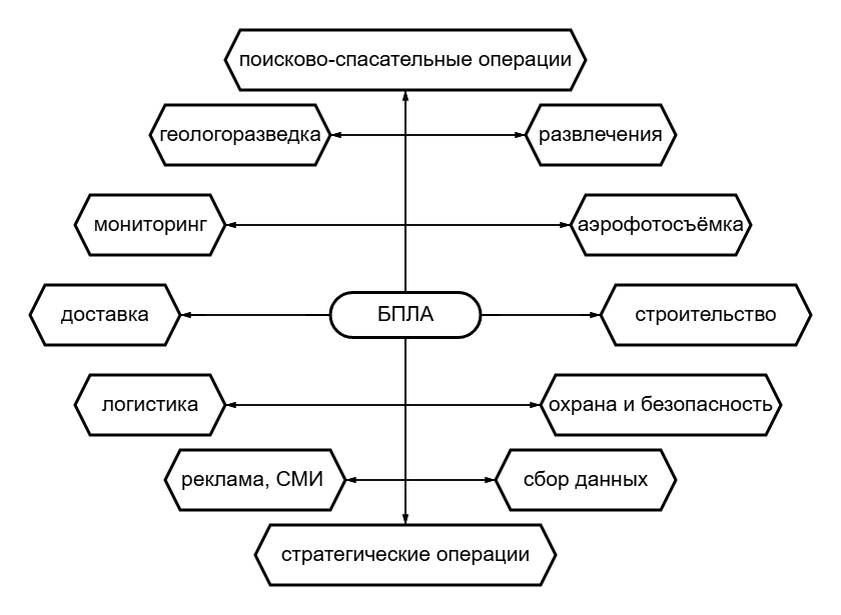
О беспилотных летательных аппаратах (БПЛА) слышали все. Хоть и широкое информированное распространение они получили не так давно, всё же применять их стали уже с начала 1917 г. Kettering «Bug» [1]. На данный момент беспилотники применяются практически во всех отраслях: военной, гражданской, агропромышленной, научной.
Во всех областях применения БПЛА особое значение уделяется точности позиционирования. В этой статье речь пойдёт о навигационных системах для автономных БПЛА. [2]

Системы навигации
Для наружной среды достаточно применить GPS (Global Positioning System). Однако для применения БПЛА во внутренней среде системы GPS недостаточно, так как возникают многочисленные проблемы: сигнал ослабевает и становится нестабильным. Так же отличительными чертами внутренней среды являются ограниченное пространство и большое количество препятствий, что влияет на выбор самого БПЛА. Проблема навигации в помещениях является ключевой. Сейчас известно множество новых технологий для контроля и управления движением беспилотников с использованием датчиков.
1. Ультразвук
Ультразвуковая система позиционирования в помещении использует высокочастотный звук как передаваемую волну для определения расстояния от приемника до передатчика. За основу принципа ультразвука взят полёт летучих мышей. Приемник и передатчик расположены на борту и передатчик испускает волны в окружающую среду. При столкновении с препятствиями они отражаются, и происходит вычисление расстояния от БПЛА до объекта по формуле, в которой необходимо знать интервал времени от момента испускания волны до момента ее приема. Однако основным недостатком этой системы является небольшой радиус действия (для того чтобы избежать большой погрешности) и сильное влияние окружающей среды (из-за поглощения звука).
2. Инерционная навигационная система
Распространенная в навигации система, используемая для оценки положения, скорости, направления. Инерционная навигационная система обладает высокой стабильностью, что позволяет определить положение БПЛА в статическом (неподвижном) состоянии. Основным недостатком этой системы является накопление ошибок с течением времени, так как система использует метод интегрирования (суммирования всех измеренных параметров) для определения положения и ориентации.
3. Оптический поток
Метод определения видимого движения пикселей плоскости изображения с одинаковой интенсивностью между двумя последовательными кадрами. Используется для точности посадки, распознавания пространства, обнаружения препятствий и регулировка скорости полета. Имеет ряд существенных недостатков: невозможность составления карт пространства в формате 3D, большое количество вычислений, которые требуют мощных вычислительных платформ.
4. Оптическая беспроводная связь
Перспективная технология для построения 3D-моделей, которая обеспечивает высокую пропускную способность, гибкость, простоту использования, высокую скорость. По принципу работы схожа с ультразвуковой технологией. Данные нескольких сканеров объединяются для компенсации ошибок. Недостатками этой системы являются проблема затухания волн из-за множества лучей и влияние внешних световых условий.
5. Системы захвата движения
Современные системы, позволяющие воссоздать движение объекта. Чаще всего используются в виртуальной реальности и в создании анимации. Система состоит из нескольких камер с инфракрасными светодиодами с отдельными зонами покрытия. Наземный компьютер подключается к камерам через сеть, собирает и обрабатывает полученные данные, восстанавливает движение БПЛА в реальном времени. Однако стоимость развертывания системы довольно высока (до 30 тыс. долларов США)
6. Радиационный сигнал.
Данные системы широко используются для определения абсолютного положения БПЛА во внутренней среде. Общие методы для радиотехнических систем включают индикацию измеренного уровня сигнала, измерение времени
прибытия этого сигнала. Недостаток заключается в том, что часть сигнала поглощается объектами, что сильно затрудняет определение местоположения на больших расстояниях.
Заключение: Каждая из этих технологий по отдельности имеет свои преимущества и недостатки. Перспективным направлением развития станет комбинирование методов для устранения недостатков каждой технологии. С развитием технологий на основе технического зрения системы захвата движения становятся одной из наиболее передовых технологий в области воспроизведения движения объектов. Это новые пути, открывающие большие перспективы для развития БПЛА. Такая, казалось бы, необычная сфера применения БПЛА в помещении на данный момент активно исследуется.
1. Павлов З.С. История развития беспилотных летательных аппаратов и их использование в современных условиях.
2. Боронахин А. М., Нгуен Куок Хань, Нгуен Чонг Иен. Сравнительное исследование навигационных систем для автономных беспилотных летательных аппаратов в помещении // Изв. вузов России. Радиоэлектроника. 2024. Т. 27, No 4. С. 6–18. doi: 10.32603/1993-8985-2024-27-4-6-18