1. Определение ESC.
ESC (Electronic Speed Controller) - электронный регулятор скорости, критически важный компонент квадрокоптера. Его основная задача - управление скоростью вращения бесколлекторных двигателей (BLDC) на основе сигналов от полётного контроллера (FC).
- Функции:
— Преобразует цифровые или аналоговые сигналы от FC в ток, подаваемый на моторы.
— Регулирует мощность, частоту и направление вращения двигателей.
— Обеспечивает стабильность полёта и точность управления.
2. Принцип работы ESC.
- Как ESC управляет моторами?
— ШИМ (Широтно-Импульсная Модуляция): Основной метод регулировки мощности. ESC изменяет длительность импульсов тока, что влияет на скорость вращения.
- Протоколы связи:
— PWM (Analog): Устаревший аналоговый протокол с низкой точностью.
— OneShot, Multishot: Цифровые протоколы с ускоренной передачей сигналов для быстрого отклика.
— DShot: Современный цифровой протокол, исключающий необходимость калибровки и поддерживающий двустороннюю связь (телеметрию).
- Фазирование тока:
ESC подаёт трёхфазный переменный ток на мотор, синхронизируя его с положением ротора (через датчики или бессенсорное управление).
3. Типы ESC.
- Однонаправленные (Standard ESC):
— Управляют только скоростью вращения.
— Подходят для базовых моделей и начинающих пилотов.
- Двунаправленные (Bi-directional ESC):
— Поддерживают передачу данных от моторов к FC (например, частоту вращения, температуру).
- Используются в продвинутых квадрокоптерах для телеметрии и улучшенного контроля.
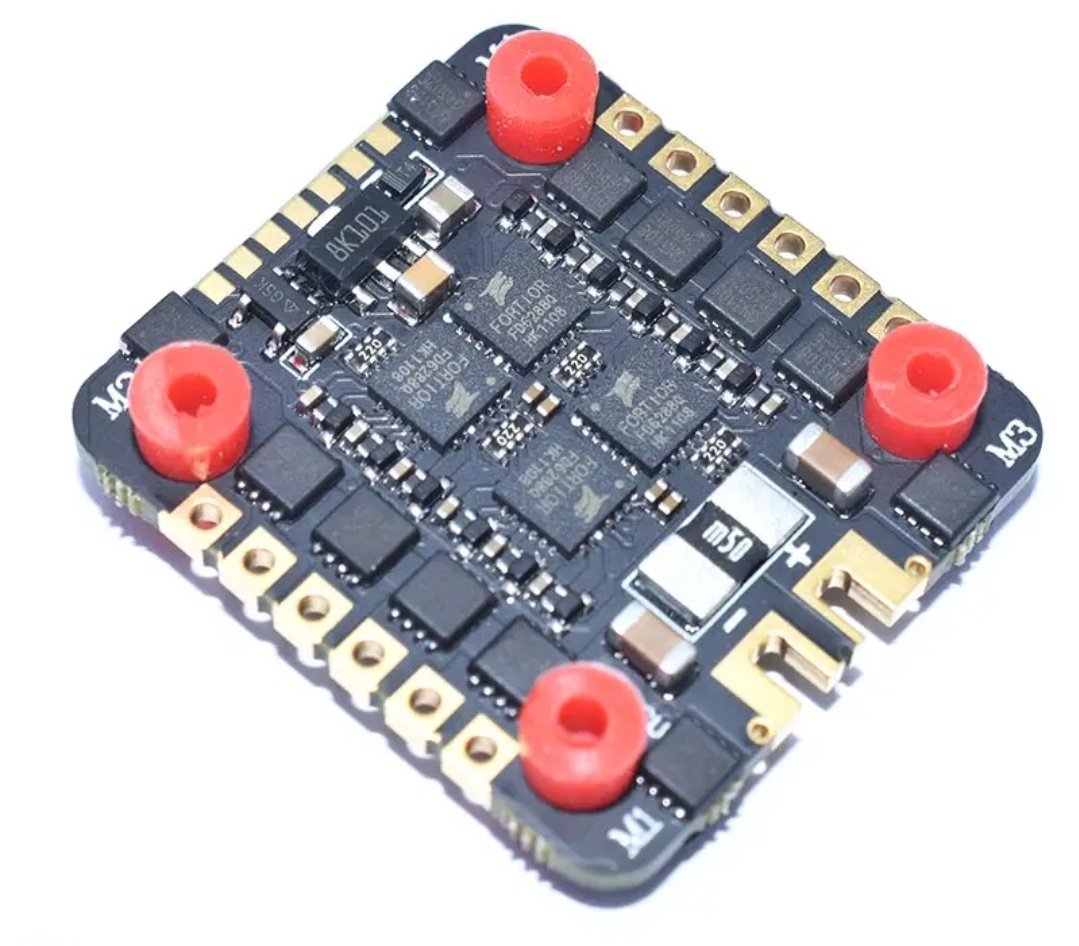
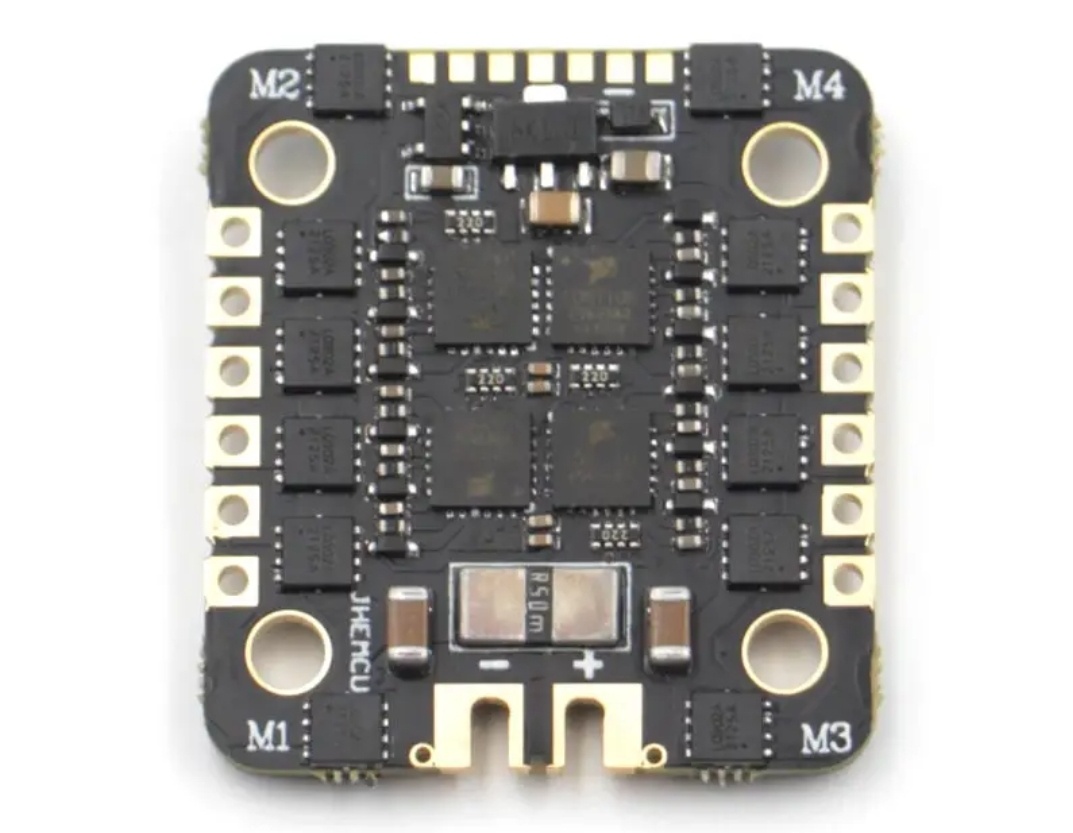
- 4-in-1 ESC:
— Четыре регулятора объединены в одну плату.
— Экономит место и вес, популярен в гоночных дронах.
4. Ключевые характеристики ESC.
— Ток (А): Максимальный ток, который ESC может подать на мотор (например, 30А, 50А). Важно выбирать с запасом (на 20–30% выше пикового тока мотора).
— Напряжение (S): Количество поддерживаемых LiPo-ячеек (например, 4S, 6S).
— Частота обновления (Refresh Rate): Скорость реакции на сигналы FC (выше = лучше управляемость).
- Прошивка:
BLHeli, BLHeli_32, SimonK - популярные firmware с разными возможностями (настройка кривой газа, защита от перегрева).
- BEC (Battery Eliminator Circuit):
Встроенный стабилизатор напряжения для питания периферии (камер, приёмника).
5. Проблемы и решения.
- Перегрев:
— Причины: Слишком высокий ток, плохое охлаждение.
— Решение: Установка радиаторов, выбор ESC с запасом по току.
- Несовместимость протоколов:
— Пример: FC отправляет сигнал DShot, а ESC поддерживает только PWM.
— Решение: Проверка совместимости перед покупкой!
- Калибровка:
— Некоторые ESC требуют ручной калибровки диапазона газа (чаще для протоколов PWM).
6. Как выбрать ESC для квадрокоптера.
- Для гоночных дронов:
— Высокий ток (40-60А), поддержка DShot600, малый вес, 4-in-1 конструкция.
- Для съёмки (FPV/кинодроны):
— Надёжность, поддержка BEC, плавное управление.
- Для начинающих:
— Недорогие ESC с защитой от перегрузки и простой настройкой.
7. Установка и настройка.
- Этапы подключения:
1. Припайка ESC к силовым проводам от аккумулятора.
2. Подключение сигнальных проводов к FC.
3. Настройка протокола в ПО полётного контроллера (BetaFlight, Cleanflight).
- Калибровка:
— Для протоколов PWM: задание минимального/максимального значения газа через FC.
— Для DShot: автоматическая настройка.
8. Перспективы развития.
- Интеграция с FC:
Создание единых плат (например, AIO - All-In-One), объединяющих ESC и FC.
- Умные функции:
— Защита от перегрузки в реальном времени.
— Автоматическая оптимизация частоты вращения.
- Повышение КПД:
Использование GaN-транзисторов для снижения потерь энергии.
Заключение: ESC - это «мозг» двигателей квадрокоптера, от которого зависят скорость, стабильность и безопасность полёта. Выбор подходящего регулятора требует учёта типа дрона, характеристик моторов и современных технологий. Понимание работы ESC помогает пилотам оптимизировать свои устройства и избежать типичных ошибок.
------------------------------------
Друзья подписывайтесь на мой канал ✅, оставляйте свои комментарии 😁.