Ожидается, что беспилотные автомобили появятся на британских дорогах в следующем году (2026). Новая система прогнозирования движения, разработанная Университетом Суррея и Университетом Фудань в Китае, обещает сделать беспилотные автомобили более безопасными и умными.
Исследователи объединили свой опыт, чтобы создать RealMotion — новую систему обучения, которая легко интегрирует исторические данные и данные о сценах в реальном времени с контекстной и временной информацией, открывая путь к более эффективным и надёжным технологиям беспилотных автомобилей.
Доктор Сяотянь Чжу, старший преподаватель Центра обработки изображений, речи и сигналов и Института ориентированного на людей искусственного интеллекта при Университете Суррея и соавтор исследования, сказал: «Беспилотные автомобили больше не являются футуристической мечтой. Роботакси уже работают в некоторых районах США и Китая, и ожидается, что беспилотные автомобили появятся на дорогах Великобритании уже в следующем году. Однако главный вопрос, который волнует всех: насколько они безопасны?»
«Хотя ИИ работает иначе, чем водители-люди, всё ещё существуют проблемы, которые необходимо решить. Именно поэтому мы разработали RealMotion — чтобы обеспечить алгоритм не только данными в реальном времени, но и возможностью интегрировать исторический контекст в пространстве и времени, что позволяет принимать более точные и надёжные решения для более безопасной автономной навигации.»
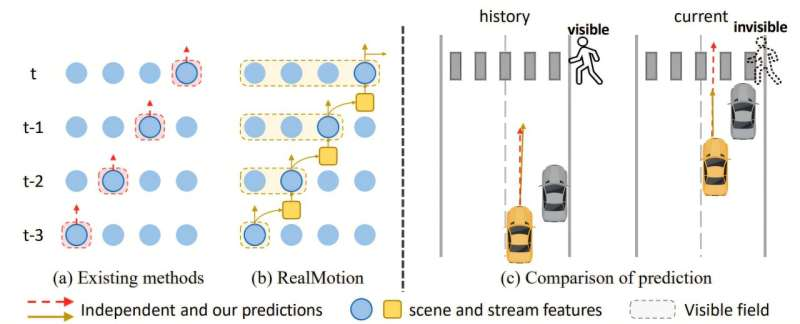
Существующие методы прогнозирования движения, как правило, обрабатывают каждую сцену вождения независимо друг от друга, не принимая во внимание взаимосвязь между прошлым и настоящим контекстами в непрерывных сценариях вождения. Это ограничение мешает точно прогнозировать поведение окружающих транспортных средств, пешеходов и других участников дорожного движения в постоянно меняющихся условиях.
В отличие от этого, RealMotion позволяет лучше понимать различные сценарии вождения. Объединение данных о прошлом и настоящем улучшает прогнозирование будущих перемещений, устраняя присущую прогнозированию перемещений множества объектов сложность.
Обширные эксперименты, проведённые с использованием набора данных Argoverse, который является ведущим эталоном в исследованиях в области автономного вождения, подчёркивают точность и производительность RealMotion. По сравнению с другими моделями ИИ, эта платформа на 8,60% улучшила показатель ошибки конечного перемещения (FDE), который представляет собой расстояние между прогнозируемым конечным пунктом назначения и реальным конечным пунктом назначения. Она также продемонстрировала значительное снижение задержки вычислений, что делает её очень подходящей для приложений реального времени.
Профессор Адриан Хилтон, директор Института искусственного интеллекта, ориентированного на людей, в Суррее, сказал: «Поскольку беспилотные автомобили вскоре появятся на британских дорогах, обеспечение безопасности людей имеет первостепенное значение. Разработка RealMotion доктором Чжу и его командой представляет собой значительный шаг вперёд по сравнению с существующими методами.
«Оснащая автономные транспортные средства системами, позволяющими воспринимать окружающую среду в режиме реального времени, а также используя исторический контекст для принятия обоснованных решений, RealMotion прокладывает путь к более безопасной и интеллектуальной навигации на наших дорогах».
Несмотря на то, что исследователи столкнулись с некоторыми ограничениями, команда планирует продолжить исследования, чтобы ещё больше расширить возможности RealMotion и преодолеть любые трудности. Эта платформа может сыграть важнейшую роль в создании следующего поколения автономных транспортных средств, обеспечивая более безопасные и интеллектуальные навигационные системы в будущем.