XX век ознаменовал собой значительный период развития робототехники, открыв эпоху революционных достижений технического прогресса.
Начиная с самого термина, введенного чешским драматургом Карелом Чапеком в его пьесе «RUR» (Россумские универсальные роботы) в 1920 году, этот век стал свидетелем концептуализации и последующего развития широкого спектра робототехнических технологий.
В 1927 году в фильме «Метрополис» был показан культовый робот Мария, символизирующий творческое исследование эпохи человекоподобных машин.
В этот период британский изобретатель Чарльз Лоусон представил «Супермена Денниса» — робота, способного выполнять различные задачи, что стало свидетельством новаторского духа той эпохи.
Однако лишь во второй половине столетия технический прогресс позволил робототехнике добиться значительных успехов.
В 1950-х годах началась разработка первых промышленных роботов, предназначенных для выполнения повторяющихся задач в контролируемых условиях.
Эти первые промышленные роботы заложили основу автоматизации производства, ознаменовав собой важный шаг на пути к современной робототехнике.
По мере развития вычислительной техники развивались и возможности роботов. В 1960-х и 1970-х годах исследователи, такие как Shakey the Robot, разработанный в Стэнфордском исследовательском институте, начали изучать сферу искусственного интеллекта и автономной навигации.
В эту эпоху также появились такие роботы, как Unimate — первый промышленный робот, использовавшийся на производственных линиях.
Робот Ясутаро Мицуи (1932)
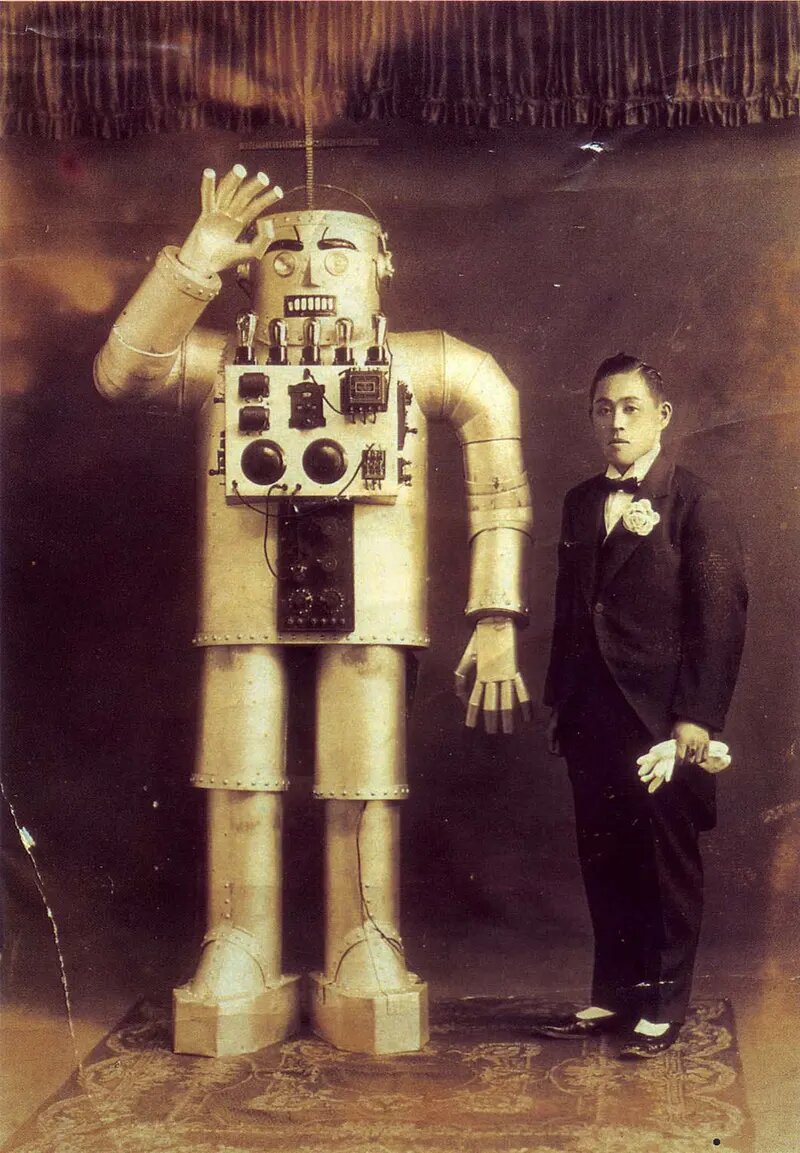
Ясутаро Мицуи со своим стальным роботом-гуманоидом, Токио, Япония, 1932 год.
Робот-гуманоид Yasutaro Mitsui Steel является ярким ранним примером японского робота человекоподобной формы.
Фотография робота появилась в книге Харуки Иноуэ 1993 года под названием «Nihon Robotto Soseiki 1920-1938».
Видимые электрические части и клапаны робота, по-видимому, служат скорее для красоты, что свидетельствует об отсылке к более ранним изображениям Уэнсли, сделанным с помощью Televox.
Такой дизайн, в котором внутренние механизмы открыты, стал обычным явлением в японских роботах и игрушках.
Когда мы внимательно изучаем робота Мицуи, то не видим, чтобы он двигался слишком уж сильно. На его ногах нет колес, а форма ног предполагает, что он не может ходить.
На верхних частях ножек имеются отметины, указывающие на возможное использование смычка, что вполне объяснимо, учитывая японскую культуру.
Пальцы и шея не сгибаются, а руки могут двигаться только вверх в плече и вращаться в локте. Мы также видим шнур питания, идущий вверх по левой ноге.
Робот Эль-Чиспас, Испания (1953)
Робот Эль-Чиспас, Испания, 1953 год.
По словам Антонио Гуаля из Барселоны: В 1950-х годах мой отец, Антони Гуаль Сегура, и его коллеги с местной радиостанции Radio Vilafranca предприняли совместные усилия по проектированию и созданию замечательного творения, известного как «El Chispas» (что переводится как «Искры»).
Это гениальное творение могло двигать руками, разговаривать и имело окно в средней части, через которое сверкали завораживающие искры.
Представление «El Chispas» во время праздничного праздника Fiesta Mayor того года вызвало настоящую сенсацию, оставив неизгладимое впечатление у присутствующих.
Супермен Деннис-робот (1939)
Робот Супермен Деннис. Самая ранняя известная дата 1939 год взята из вышеупомянутой рекламы Popular Science в словаре Вебстера.
В 1939 году британский изобретатель Чарльз Лоусон создал «Супермена Денниса» — робота ростом 7 футов.
Этот робот, как утверждается, мог выполнять различные действия, например, управлять дорожным движением, петь, зажигать и курить сигареты, а также сидеть и стоять.
Несмотря на ограниченность деталей, фильм подчеркнул творческий дух своего времени, показав, как машины могут имитировать действия человека и вносить вклад в выполнение различных задач.
Мобот (1961)
«Мобот» (МОБИЛЬНЫЙ РОБОТ), созданный компанией Hughes Aircraft Electronic Labs, одевает женщину в Калифорнии, 1961 год. (Фото журнала Life).
На дворе 1961 год, и компания Hughes Aircraft Electronic Labs была готова произвести революцию в мире, выпустив Mobot — великолепного мобильного робота.
Mobot был немного больше, чем несколько холодильников вместе взятых, и это механическое чудо должно было автоматизировать все критически важные задачи в вашей жизни, такие как уход за ногтями, застегивание молнии на платье и помощь в расчесывании волос, пока вы смотрите на себя в зеркало.
Термин «Мобот» представляет собой комбинацию слов «мобильный» и «робот», что указывает на его функцию как мобильной роботизированной системы. Целью этого проекта было изучение и развитие возможностей автономных мобильных роботов.
Проект «Мобот» был инициирован с целью разработки робота, способного перемещаться и выполнять задачи автономно.
Он был разработан для демонстрации потенциала робототехники в различных областях применения, таких как наблюдение, разведка и, возможно, даже выполнение задач в опасных средах.
Проект, вероятно, включал внедрение датчиков, вычислительных систем и алгоритмов, которые позволят роботу воспринимать окружающую среду, принимать решения и ориентироваться без прямого контроля со стороны человека.
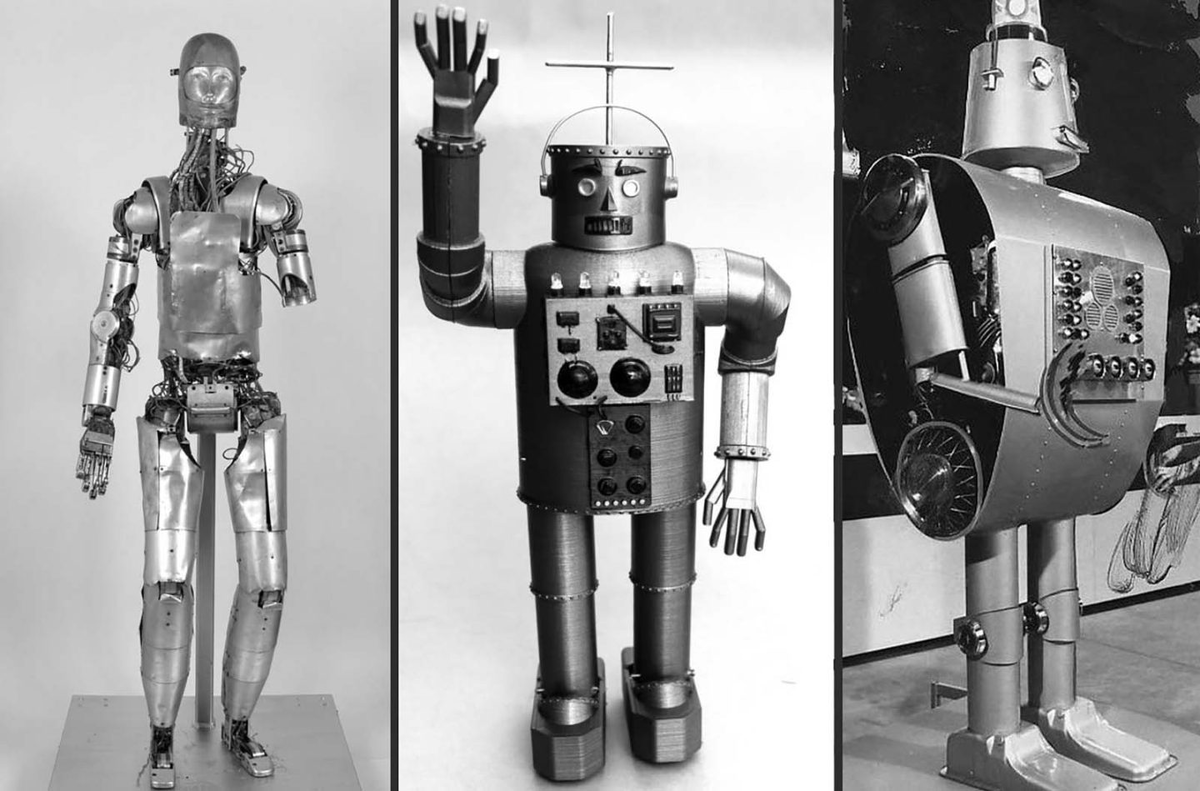
Испытательный робот-машина NASA для скафандров 1965 года
До того, как НАСА запустило людей на Луну, космическое агентство едва не обратилось к человекоподобному роботу для испытания прототипов скафандров своих астронавтов.
Гидравлический андроид тоже мог бы работать — если бы не его склонность к утечке масла при использовании. Так называемый проект «Power Driven Articulated Dummy» продолжался с 22 мая 1963 года по 31 июля 1965 года.
Робот, созданный в Научно-исследовательском институте ИИТ в Чикаго, может имитировать 35 основных движений человека.
Он был оснащен датчиками на каждом суставе для измерения сил, действующих на тело человека со стороны герметичного скафандра.
Движения манекена-робота обеспечивались гидравлическими приводами, работающими на масле, которое циркулировало по системе циркуляции из нейлоновых трубок.
Необычный робот-манекен с гидравлическим приводом, разработанный для NASA с целью использования при испытании скафандров, около 1963-1965 гг.
Конструкция позволяла андроиду поворачивать бедра, поднимать и опускать руки и ноги, пожимать плечами, сжимать кулаки и даже пожимать руки, но она не могла выдерживать давление, необходимое для движения конечностей робота, без протечек.
Сепулка Советского Союза (1962)
Сепулка, робот-гид, Советский Союз, 1962 год.
«Этот робот-экскурсовод был разработан в 1962 году в экспериментальной мастерской Всесоюзного общества «Знание» конструктором М. Александровым и художественным руководителем М. Гороховым и затем модернизирован в 1987 году.
Речь воспроизводится встроенным магнитофоном. Движения робота и воспроизведение записи на пленку управляются дистанционно по радио с расстояния до 20 м.
Сепулька был назван в честь роботизированного персонажа из рассказов Станислава Лема. Персонаж Станислава Лема Сепулька был объектом неизвестного происхождения и назначения.”
Фредди Форд (1960-е)
«Фредди Форд» — механический робот, отвечающий на вопросы.
Сделанный почти полностью из автомобильных деталей, Фредди был ростом девять футов и весил более 360 кг, при этом его грудь составляла 126 дюймов, а талия — 120 дюймов.
Вместо ног у него были масляные поддоны, а вместо рук — тормозные колодки. Уши у него были сделаны из крышек радиаторов с прикрепленными к ним автомобильными антеннами.
Его глаза были габаритными огнями Ford Mustang, а его рот был задним ходом Ford Thunderbird. Его руки были выхлопными трубами, а его ноги были амортизаторами.
С 1967 года Фредди помогал Форду продавать автомобили на автошоу. Он был не очень активен, но мог ответить на дюжину вопросов перед аудиторией.
Неудивительно, что большинство его ответов содержали пошлые шутки и восторженные отзывы о продукции Ford.
Робот Космос, Франция (1958)
Робот Космос из 1958 года.
«Подвинься, человек». Даже самому опытному парижскому водителю будет трудно устоять перед указаниями водителя этого своеобразного транспортного средства.
Но здесь нет никакого внеземного влияния; это робот, рожденный и выращенный прямо здесь, на Земле. Встречайте «Космос», доморощенное творение, стоявшее рядом с вертолетом на научной выставке на берегах Сены.
Несмотря на репутацию французов как беспечных зрителей, «Космосу» удалось привлечь к себе значительное внимание.
Робо-сенсор (1982)
Robo Sensor из Японии, 1982 год.
Weekly Reader, выпуск 23, 2 апреля 1982 г. «Японский робот пожимает руку человеку, в то время как специальные датчики в роботе измеряют силу хвата и температуру тела.
Цифры отображаются, и робот может комментировать: «Ух ты, какая рукоятка!» Робот также может измерять температуру в помещении и утечки газа».
Горо Робот (1964)
Горо, робот из Японии.
Горо, пятифутовый робот, разработанный фирмой по исследованию игрушек, окружен школьниками в столице Японии Токио 29 февраля 1964 года.
Горо ходит во всех направлениях, кланяется встречным, подмигивает девушкам и разговаривает по рации, которую держит в руке его создатель.
Гайган (1957)
Джиган, весящий 1200 фунтов, мог легко переносить двух девушек.
Гигантский радиоуправляемый робот Gygan, который более полувека назад заворожил мир, мигая своими глазами, похожими на автомобильные фары, резко поворачивая голову слева направо и шаркая вперед с ужасающей скоростью 10 футов в минуту, будет выставлен на аукцион после десятилетий хранения в частной коллекции.
Существо ростом 8 футов и весом 1000 фунтов было запущено на торговой ярмарке в Милане в 1957 году, в том же году, когда в космос был запущен первый искусственный спутник Земли.
Робот Cygan из Италии.
Его дизайнер, инженер из Турина Пьеро Фиорито, с недоумением утверждал, что он похож на «гордого англичанина».
Робот Барбаросса (1909)
Робот Окультус (или Барбаросса) был выставлен в Берлине в 1909 году Адольфом Уитменом, известным немецким изобретателем.
О роботе по имени Оккультус или Барбаросса, выставленном в Берлине в 1909 году г-ном Адольфом Уитменом, известным немецким изобретателем, известно очень мало.
Спустя много лет Уитмену удалось создать механического человека, который может ходить и совершать другие человеческие движения, такие как говорить, петь, свистеть и смеяться.
Этот механический шедевр настолько человечен, что на расстоянии ярда его невозможно отличить от живого существа. Фигура представляет собой массу сложных шестеренок и механизмов.
В сундуке установлено несколько фонографов, но то, как управляется механизм, является секретом изобретателя.
Говорят, что в основе механического чуда лежат беспроводные электрические волны. Каждая часть фигуры управляется маленьким электромотором.
Робот Unimate (1961)
Кофе подается роботом Unimate, 1967 год.
Unimate был первым промышленным роботом, который работал на сборочной линии General Motors на заводе Inland Fisher Guide в городке Юинг, штат Нью-Джерси, в 1961 году.
Он был изобретен Джорджем Деволом в 1950-х годах с использованием его оригинального патента, поданного в 1954 году и выданного в 1961 году. Патент начинается так:
Настоящее изобретение относится к автоматическому управлению машинами, в частности, подъемно-транспортными устройствами, а также к устройствам автоматического управления, подходящим для таких машин.
Машина выполняла работу по транспортировке отливок со сборочной линии и сварке этих деталей с кузовами автомобилей. Это была опасная задача для рабочих, которые могли отравиться токсичными парами или лишиться конечности, если бы не проявили осторожность.
Эрик, британский робот (1928)
Эрик Робот со своим изобретателем капитаном У. Х. Ричардсом.
Даже британские роботы пьют чай после обеда. Эрик, первый британский робот, который когда-либо существовал, похоже, считал, что у него есть пример для подражания.
Изобретение англичанина капитана У. Х. Ричардса позволило Эрику повернуть голову и поклониться.
Робот Арок (1970-е)
Робот Арок, Бен Скора, 1970-е.
Творение Бена Скоры из Палос-Хиллз, который сейчас находится в доме престарелых. AROK (имя Скоры, написанное наоборот без буквы S), когда он был в рабочем состоянии, мог выполнять различные задачи, такие как уборка пылесосом, смешивание напитков, разговор, фотографирование, подъем до 150 фунтов и выгуливание собаки.
Он также мог сгибаться в талии под углом 45 градусов и поворачивать верхнюю часть туловища вправо и влево. Он мог «двигаться» со скоростью 3 мили в час.
Вместо черепа у него шлем мотоцикла, вместо рук — выхлопной шланг сушилки для белья, а вместо кистей — резиновые перчатки. В его панели управления — микрофон, а в голове — динамик.
Им можно управлять с помощью пульта от телевизора с использованием сигналов FM-радио. Один из двух 12-вольтовых автомобильных аккумуляторов обеспечивает питание для работы AROK, а другой — для привода двигателей.
Аккумуляторные батареи размещены на платформах в ножках, а приводной механизм — в основании.
Робот Леонардо (1492)
Модель робота Леонардо с внутренним устройством. Возможно, сконструирована Леонардо да Винчи около 1495 года.
Заметки о конструкции робота появились в альбомах, которые были вновь обнаружены в 1950-х годах. Говорят, что Леонардо продемонстрировал машину на празднике, устроенном Лодовико Сфорца при дворе в Милане в 1495 году.
Робот-рыцарь мог стоять, сидеть, поднимать забрало и самостоятельно маневрировать руками, а также имел анатомически правильную челюсть.
Вся роботизированная система управлялась серией шкивов и кабелей. С момента обнаружения альбома с эскизами робот был построен точно по проекту Леонардо и оказался полностью функциональным.
Робот Мария из Метрополиса (1927)
Мария из фильма «Метрополис».
«Метрополис» — немой научно-фантастический фильм, вышедший на экраны в 1927 году под руководством режиссера Фрица Ланга, познакомил зрителей с культовым персонажем-роботом по имени Мария.
Созданная в виде человеческой женщины, внешность Марии в «Метрополисе» действительно опередила свое время. Ее творение было технологическим чудом, сочетающим в себе творческий дизайн с ранними методами спецэффектов.
Роль Марии в фильме заключалась в том, чтобы служить инструментом манипуляции и контроля. Она использовалась для манипулирования рабочими городского метро и поддержания статус-кво.