Ardupilot — это программное обеспечение с открытым исходным кодом, предназначенное для управления беспилотными аппаратами . Оно позволяет осуществить точечную настройку и автоматизировать работу различного беспилотного оборудования начиная от колесной техники и заканчивая БПЛА вертикального взлета и даже Субмаринами!

Ardupilot является проектом с абсолютно полностью открытым исходным кодом. Его развитием занимаются сотни тысяч человек по всему миру. Следовательно , обладая достаточными знаниями в области программирования вы сможете доработать ПО под собственные нужды. Исходный код Ardupilot
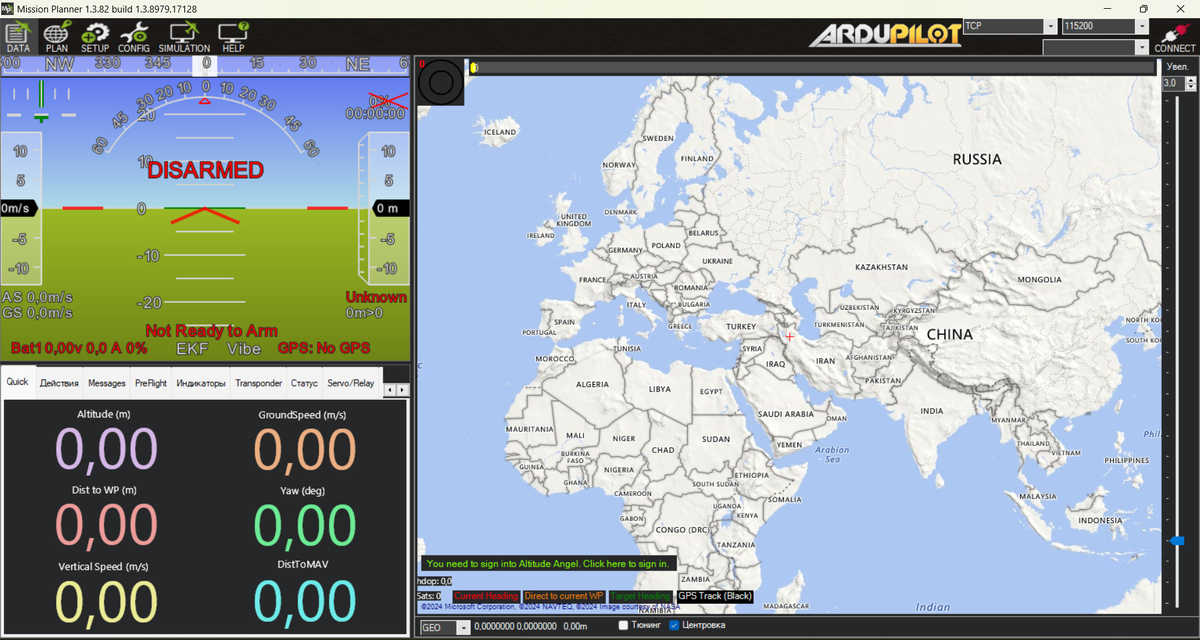
Для установки и точечной настройки оборудования на ПО Ardupilot в подавляющем большинстве случаях используется отдельно ПО под названием Mission Planner. Данное ПО так-же является проектом с открытым исходным кодом и может быть индивидуально доработано. Mission Planner и исходный код.
Наиболее популярным языком общения между пультом и дроном является MavLink и по традиции он так-же с открытым исходным кодом. Подавляющее большинство оборудования заточенное под Ardupilot общается с дроном именно на этом языке. Благодаря MavLink можно произвести практически любые манипуляции с ПО Ardupilot дистанционно.
Mission Planner незаменимый атрибут настройки беспилотника , однако управлять с его помощью дроном не совсем удобно . QGroundControl является мощным инструментом для управления беспилотником. QC существует для различных операционных систем Windows,Android,Linux. Так-же имеет открытый исходный код и может быть вами доработан под абсолютно различные задачи. Благодаря MavLink - QC полностью интегрируется в экосистему Ardupilot. Исходный код и установка QC
Подытожим. Настраиваем дрон мы в Mission Planner , а управляем им в QGroundcontrol .
Одним из важнейших плюсов Ardupilot является запись крайне детальных полетных логов. После полета вы можете детально, посекундно изучить каждый датчик и каждый параметр и построить всевозможные графики. Наиболее удобным софтом для изучения логов является UAV Log Viewer. И представляет собой софт с веб интерфейсом . Периодически для его работы требуется подключение к VPN.
Данная статья носит ознакомительный характер и в дальнейшем мы детально произведем разбор по работе каждого софта. Так-же прошу каждого оставить рецензию для определения вектора развития канала! Всем спасибо за прочтение!