Современная робототехника не стоит на месте. Это подтверждает международная команда инженеров, создавшая четвероногого робота PAWS, который передвигается без сложных моторных систем. Вместо этого конструкция использует принципы биомеханики, позаимствованные у собак.
Робот PAWS представляет собой результат тщательного анализа движений собак с помощью машинного обучения. Инженеры выделили четыре ключевых двигательных синергии, которые отвечают за 80% вариаций движений конечностей у животных. Эти паттерны стали основой для уникальной механической конструкции.
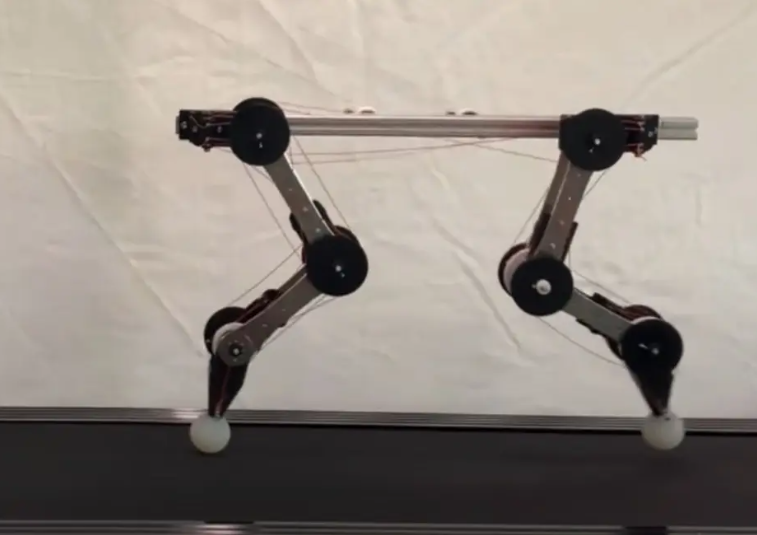
Система использует всего четыре мотора, каждый из которых активирует определенную синергию. Тросовая передача и пружинные механизмы обеспечивают движение двенадцати суставов, имитируя работу сухожилий у живых существ. Такое решение значительно снижает энергопотребление по сравнению с традиционными роботами.
На беговой дорожке PAWS демонстрирует удивительные способности. Без активации моторов он может поддерживать галопирующую походку, адаптируясь к изменениям скорости. Механическая податливость системы позволяет роботу сохранять устойчивость при внешних воздействиях – после толчка он возвращается к стабильному движению всего за один цикл.
Особенность конструкции – оптимальное сочетание жесткости и эластичности в суставах. Диаметры шкивов и натяжение тросов рассчитаны так, чтобы воспроизводить естественную биомеханику. Обратная кинематика подтверждает – углы в суставах робота практически идентичны собачьим при ходьбе, беге и других режимах.
Разработчики отмечают, что PAWS может быть задействован в поисково-спасательных работах. Энергоэффективность и устойчивость конструкции позволяют работать в сложных условиях без постоянного контроля. Следующий этап – интеграция более сложных алгоритмов для автономного преодоления препятствий.