
Одним из элементов конструкции мультироторного квадрокоптера (да и в принципе любого аппарата использующего бесколлекторный мотор) будет регулятор оборотов двигателя или ESC
ESC — electronic speed controller, переводится как электронный контроллер скорости. В русскоязычном сообществе принято называть их как «регуляторы оборотов», в простонародье «регули» или «регуляторы».
Зачем нужен ESC
Тут все просто, ESC - регулирует скорость оборотов двигателей ориентируясь на команды полетного контроллера. Чем быстрее вращается двигатель, тем больше он создает тягу, тем быстрее летит квадрокоптер.
Как работает?
Для простого понимания — контроллер полета посредством специального протокола посылает данные регулятору оборотов, что нужно прибавить или убавить газ на двигателе. Но двигателю квадрокоптера нельзя просто подать напряжение, так как он трехфазный и требуется попеременно подавать напряжение на определенные участки обмотки. Этим и занимается регулятор оборотов.
На ESC есть микросхемы, которые называются Мосфеты (MOSFET), и эти платы выполняют роль ключей — открывают и закрывают подачу тока на определенные участки обмотки.
Как уже говорилось выше, для общения между полетным контроллером и регулятором оборотов, используются специализированные протоколы связи.
Современные ESC поддерживают различные протоколы, например Dshot1200, Dshot600, Oneshot125, Multishot. Они отличаются скоростью обмена данными, чем выше скорость, тем быстрее будет отзыв двигателей на ваши команды.
Для эффективной работы дрона, нужно выбирать ESC, которые поддерживают более современные протоколы, но при этом нужно помнить, что ваш полетный контроллер тоже должен поддерживает эти протоколы.
Строение регуляторов оборотов (ESC)
Строение регуляторов оборотов не слишком сложное, они состоят из:
MOSFET;
Драйвер затвора (gate drivers);
Микроконтроллер;
Регулятор напряжения.
В некоторых ESC также устанавливаются светодиоды и/или датчики тока.
Что такое MOSFET регулятора оборотов квадрокоптера?
MOSFET (metal-oxide-semiconductor field effect transistor) — это полевой транзистор с изолированным затвором. Он работает как ключ — драйвер затвора подает сигнал — MOSFET открывается и подает ток на определенную область статора, там самым, заставляя магниты вращать колокол двигателя из-за того, что обмотка (статор) попеременно меняет напряжение в определенных частях так, чтобы магниты начинали притягиваться в определенный момент времени к определенной части статора — таким образом, колокол двигателя начинает вращаться. Все это происходит много раз за доли секунды.
Что такое драйвер затвора регулятора оборотов?
Драйвер затвора управляет кучей мосфетов, о которых рассказано выше. Он определяет, когда полевому транзистору открыться, а когда закрыться.
В регуляторах оборотах производителем могут использоваться специальные драйверы, которые эффективны в управлении при использовании функции активного торможения двигателями.
В идеале, для каждой фазы двигателя должен использоваться свой драйвер затвора, поэтому компания Fortio начала производство микросхем FD6288 для BLHeli_32, которые совмещают в себе 3 независимых драйвера затвора.
Что такое микроконтроллер?
Это мозги регуляторов оборотов.
Именно этот чип прошивается и в него загружается прошивка BLHeli.
Что такое регулятор напряжения в регуляторе оборотов?
Здесь тоже все просто исходя из названия — этот компонент регулирует напряжение для питания всех компонентов ESC.
Другие компоненты
Светодиоды — они на ESC просто для красоты и уведомлений, больше никакую функцию не несут и уж тем более никак не влияют на производительность.
Датчик тока — служит для отображения в OSD текущего тока, который подается на регуляторы оборотов.
Если немного упростить , то строение ESC будет выглядеть вот так:
Какие по строению бывают регуляторы оборотов?
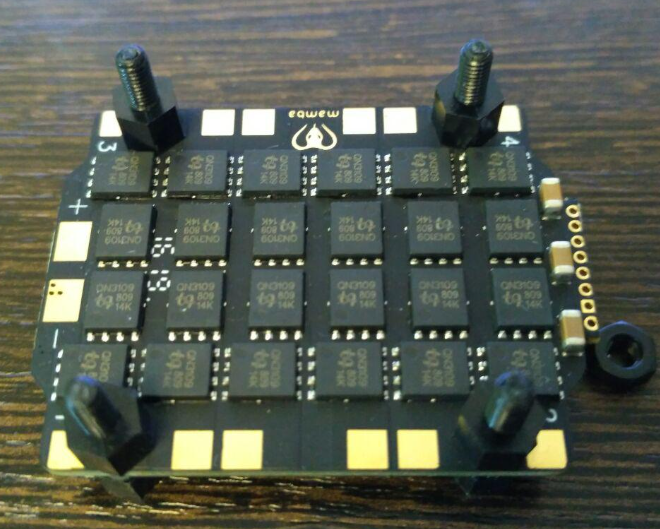
Как вы возможно уже знаете, регуляторы оборотов бывают 4 в 1 и отдельные. 4 в 1 становятся все популярнее, так как это компактность и их можно установить в стек с полетным контроллером и такие регуляторы оборотов как правило совмещены с платой распределения питания (PCB), что опять же экономит место и вес. Выглядят они вот так:
Отдельные регуляторы оборотов представляют из себя изолированные платы с компонентами с индивидуальным питанием и подсоединением:
Как выбрать регулятор оборотов (ESC)
На что следует обратить внимание при выборе ESC регуляторов оборотов? Для новичка будет сложновато, но мы постараемся описать как можно подробнее и охватить все параметры. В любом случае, ниже будет список рекомендованных ESC, что существенно упростит вашу задачу по выбору.
Номинальная мощность
В описании указывается как «Power rating» или «Constant». Для квадрокоптеров класса мини и микроиспользуются 3 основных номинальных мощности:
<18А: такие регуляторы используются на микро-дронах и мини, но с рамами до 180мм, так как с рамами выше вам просто не будет хватать мощностей.
20А: На мини-дронах чаще всего используют регуляторы на 20 ампер: то есть у вас рама 180-220 миллиметров и пропеллеры размером до 6 дюймов + аккумулятор 3-4S.
30А: Сейчас это стандарт для гоночных квадрокоптеров и с такими регуляторами вы получите отличный дрон для гонок и фристайла. Рамы можно использовать для гоночных размером до 250мм.
Для тех, кто хочет собрать мощный дрон, способный моментально разогнать двигатели, существуют и более высокие мощности:
35А; 45А.
Пиковая мощность или взрывная мощность
В описании указывается как «Burst power rating». Это количество мощности, которое регулятор сможет обработать в короткий промежуток времени. Это довольно важный параметр для гоночных мини дронов, так как часто на гоночных происходит резкое изменение скорости — сейчас вам нужно погасить скорость, чтобы пролететь препятствие и следом резко дать полный газ для ускорения.
Поддержка аккумуляторов
Многие современные ESC поддерживают аккумуляторы LiPo 4-6S, но сейчас все чаще некоторые собирают дроны 5S и 6S, однако, если вы купите регулятор с поддержкой 6S, а сами соберете дрон на 3S, например, то это будет пустая трата денег.
Какой у вас аккумулятор? Вот под такой и ищите регулятор, это тоже указывается в характеристиках
Форм-фактор (размер)
Форм-факторы ESC регуляторов оборотов бывают 3 типов:
1. Для крепления на лучах рамы;
2. 4 в 1 — для крепления над или под полетным контроллером;
3. На одной плате с полетным контролером
4 в 1 — это одна большая плата размером с полетный контроллер, которая крепится над или под ним. Придумана для экономии места и веса и используется в основном на микро-дронах, но сейчас набирает популярность и на мини. Но есть один минус — если выйдет из строя один регулятор, придется менять всю плату целиком.
Но есть и явное удобство ,ничего не висит на лучах рамы, особенно если рама маленькая с тонкими лучами.
У индивидуальных регуляторов - плюсом является возможность замены их по одному, в случае выхода из строя.
На микродронах, в связи с недостатком места и очень плотной компоновкой приходится использовать размещение всех элементов на одной плате, что делает очень сложным ремонт дрона при его повреждении.
Вес
Каждый регулятор имеет свой вес, их 4 штуки — значит вес одного умножаем на 4. В этом плюсы 4 в 1 — плата весит меньше, чем по отдельности. Ищите наиболее легкие платы, чтобы дрон был наиболее маневренный. Здесь сэкономите, на камере сэкономите, на антеннах и так далее — в итоге сэкономите 50-100гр.
Прошивка регуляторов оборотов
Эта информация всегда пишется магазином.
Самые известные:
BLHeli. Пользовался популярностью в 2015-2016 годах. После чего эту прошивку заменила следующая версия — BLHeli_S. Сейчас не используется.
BLHeli_S — создавался для контроллеров ВВ1 и ВВ2. Регулятор под управлением этой прошивки работает значительно плавнее. S — здесь обозначает ту самую «плавность».
BLHeli_32 — в данный момент на большинстве регуляторов используется именно эта прошивка. Она распространяется с закрытым кодом и в ней уже есть возможность настроить в регуляторах телеметрию, настроить светодиоды и другое.
Регуляторы с BLHeli_32 немного дороже, так как у них есть датчики и телеметрия. В гоночных дронах обычно эту «мишуру» не используют, но если вы хотите — то почему нет?)
KISS — прошивка для регуляторов, которые работают с полетным контроллером KISS.
SimonK — некогда популярная прошивка, которая теперь вышла из под контроля. Не рекомендуем покупать регуляторы с этой прошивкой.
Чип контроллера
Уже давно не является определяющим параметром, но в спецификациях иногда его указывают. У регуляторов BLHeli_S или BLHeli_32 с поддержкой DSHOT всегда хорошие чипы.
Провода
Оптимальным вариантом считается припаивание проводов мотора сразу к плате регулятора, но часто в продаже находятся регуляторы со своими проводами и приходится либо отпаивать их, либо паять провод-провод.
На ESC схема подключения двигателей выглядит следующим обраом
Аппаратный PWM драйвер
Если эта функция есть (ее может и не быть) на ваших регуляторах, то моторы станут работать на них немного тише и немного эффективнее. Также функция обеспечивает более точный контроль, но на практике это мало кто заметит.
Как это работает: управление скоростью вращения двигателей осуществляется путем повышения или понижения напряжения, подаваемого на моторы. Это регулируют полевые транзисторы (мосфеты), те самые квадратики на плате, они открываются и закрываются, управляя процессом вращения двигателя. Время открытого и закрытого состояния мосфетов напрямую зависит от подаваемой мощности.
Самый медленный и поддерживаемый всеми регуляторами протокол обозначается буквами PWM или если по-русски ШИМ, широтно-импульсная модуляция.
В гоночных квадрокоптерах он не используется, поскольку очень медленный.
Минимумом для регулятора гоночного квадрокоптера является поддержка протокола OneShot 125.Один пакет данных этого протокола передается за 250 микросекунд, что 8 раз быстрее обычного ШИМ. MultiShot является самым быстрым протоколом связи и он в 10 раз быстрее, чем OneShot 125.
В настоящее время повсеместно внедряется принципиально новый тип протокола, цифровой, который называется DSHOT.
Цифровой протокол отличается более точной и помехоустойчивой передачей данных и высоким разрешением.
На данный момент есть 3 варианта этого протокола в зависимости от скорости интерфейса DSHOT 150, DSHOT 300 и DSHOT 600.
Как видите DSHOT 600 по скорости передачи информации сопоставим с MultiShot. Однако преимущество цифрового сигнала вне конкуренции.
Так вот, до недавнего времени, этот процесс управлялся только чипом, управляющим регулятором. KISS добавили еще один чип, который отвечает только за процесс выдачи сигнала.
Благодаря этому, регуляторы, а точнее моторы работали на них очень гладко и сообществу пилотов это очень понравилось.
Помимо KISS, аппаратный PWM драйвер есть и у регуляторов BLHeli_32.
Что еще нужно учитывать?
Параметры выше важные, но также нужно учитывать энергопотребление самих двигателей. Несомненно, что регуляторы на 30 Ампер покроют потребность почти всех двигателей и поэтому об этом было решено написать в конце, чтобы окончательно не запутать вас, потому что придется смотреть в таблицу с характеристиками двигателя:
Блок Load Current (A) — то есть, сколько в пиковой нагрузке будет потреблять двигатель. В нашем случае это Racerstar 2205 и в пике он потребляет 27.6 Ампер, что полностью покрывают регуляторы оборотов на 30 Ампер.