Всем здравствуйте. Тут мне попалась достаточно интересная схема контроллера шагового двигателя, с непривычным использованием микросхем TDA2030. Шаговые двигатели есть в нескольких версиях и габаритов с различными рабочими напряжениями. Преимущество представленной схеме универсального контроллера заключается в том, что его можно использовать в широком диапазоне рабочих напряжений, примерно от 5 В до 18 В.
Так же он может управлять двигателем с пиковым напряжением, равным половине напряжения питания, поэтому он нормально работает с шаговыми двигателями, рассчитанные на напряжение от 2,5 В до 9 В. Схема также может обеспечивать токовою нагрузку двигателя до 3,5 А, что означает, его можно использовать для управления относительно большими двигателями. Этот контроллер также защищен от короткого замыкания и имеет встроенную защиту от перегрева. Вот посмотрим на принципиальную схему, которая представлена на рисунке.
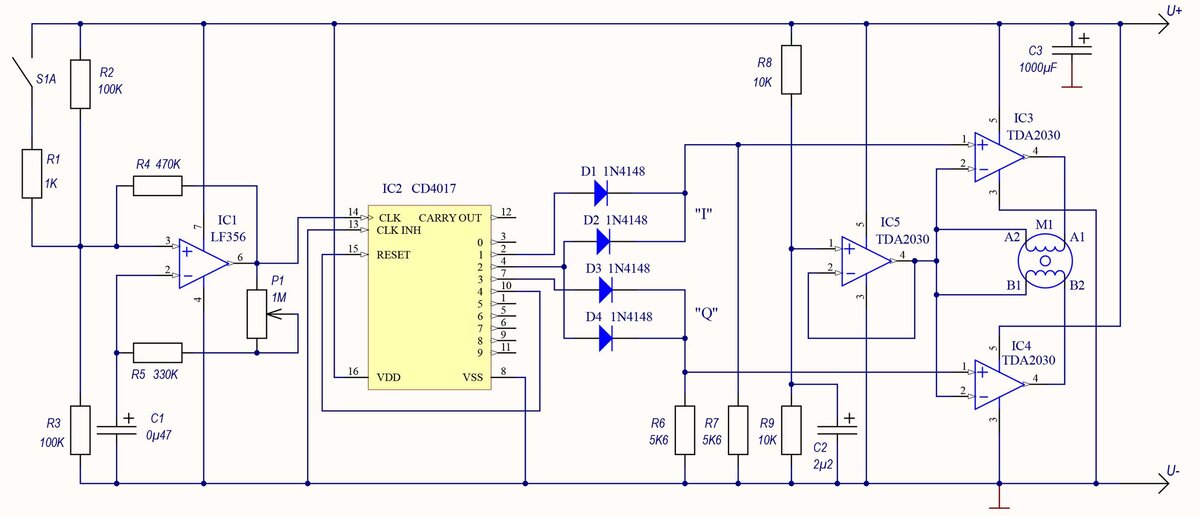
Для управления шаговым двигателем требуются два сигнала, это означает, что они представляют собой два сигнала прямоугольной формы с одинаковой частотой, но с постоянной разностью фаз 90 градусов. Микросхема IC1 генерирует сигнал прямоугольной формы с частотой, которую можно установить с помощью потенциометра R1. Эта частота определяет скорость вращения шагового двигателя.
Управление генерируется десятичным счетчиком на микросхеме 4017. Выходы Q0-Q9 счетчика последовательно выдают высокий уровень на нарастающие фронты тактового сигнала. Конечно, управление можно сформировать с выходов при помощи двух логических элементов ИЛИ, которые в схеме сформированы с использованием двух диодов и резистора для каждого и создает сигналы I и Q.
Сигнал «I» означает «синфазный», а «Q» означает «квадратурный», это значит, что он имеет сдвиг фазы на 90 градусов по отношению к сигналу «I». Обычной практикой является управление обмотками шагового двигателя, которая называется «Н-мост». Это позволяет изменить направление тока через каждую обмотку, что необходимо для нормальной работы биполярного двигателя (обмотки которого не имеют отводов от середины). Конечно, его также можно использовать для управления униполярным двигателем (с обмотками с отводом от середины).
И вместо того, чтобы использовать двухтактную схему, здесь решили использовать микросхемы аудио усилителя (типа TDA2030), хотя это может показаться немного странным. С функциональной точки зрения TDA2030 на самом деле является своего рода мощным операционным усилителем. Он имеет дифференциальный усилитель на входе и двухтактный драйвер на выходе. IC3, IC4 и IC5 относятся к этому типу. Микросхемы IC3 и IC4 включены как компараторы. На их неинвертирующий вход подаются ранее упомянутые сигналы I и Q, а на инвертирующие входы устанавливается потенциал, равный половине напряжения питания. Этот потенциал обеспечивает микросхема TDA2030. Таким образом, выходы IC3 и IC4 отслеживают их неинвертирующий вход, и каждый из них управляет одной обмоткой двигателя.
Другие концы обмоток, в свою очередь, подключены к половине напряжения питания, обеспечиваемого микросхемой IC5. Поскольку один конец каждой обмотки подключен к прямоугольному сигналу, который попеременно изменяется между 0 В и потенциалом, близким к напряжению питания, а другой конец находится на половине напряжения питания, к каждой обмотке всегда прикладывается напряжение, равное половине напряжения питания обмотки, но меняет полярность в соответствии с состояниями сигналов I и Q. Это именно то, что и нужно для управления биполярным шаговым двигателем.
Скорость вращения можно изменять с помощью потенциометра P1, но фактическая скорость различна для каждого типа двигателя, поскольку она зависит от количества шагов на оборот. В принципе, любую желаемую скорость можно получить, регулируя значение конденсатора C1. Диапазон регулировки P1 можно увеличить, уменьшив значение резистора R5.
Если шаговый двигатель выключается путем отключения напряжения питания от цепи, двигатель может продолжать вращаться некоторое время из-за собственной инерции или механической нагрузки на двигатель (эффект маховика). Также возможно, что положение двигателя не соответствует состояниям сигналов I и Q при первом включении питания в цепь. В результате двигатель иногда может «запутаться» при запуске, в результате чего он делает шаг в неправильном направлении, прежде чем начать движение в направлении, определяемом сигналами контроллера.
Этих эффектов можно избежать, добавив дополнительный переключатель S1 и резистор 1 кОм, которые затем можно использовать для запуска и остановки двигателя. Когда S1 замкнут, сигнал прекращается, но C2 сохраняет свои выходные уровни в этот момент, поэтому непрерывные токи через обмотки двигателя блокируют ротор в одном положении. TDA2030 имеет внутреннюю защиту от перегрева, поэтому выходной ток будет уменьшен автоматически, если микросхемы становится слишком горячим. По этой причине рекомендуется устанавливать IC3, IC4 и IC5 на радиатор (возможно, общий радиатор), когда используется относительно мощный двигатель.