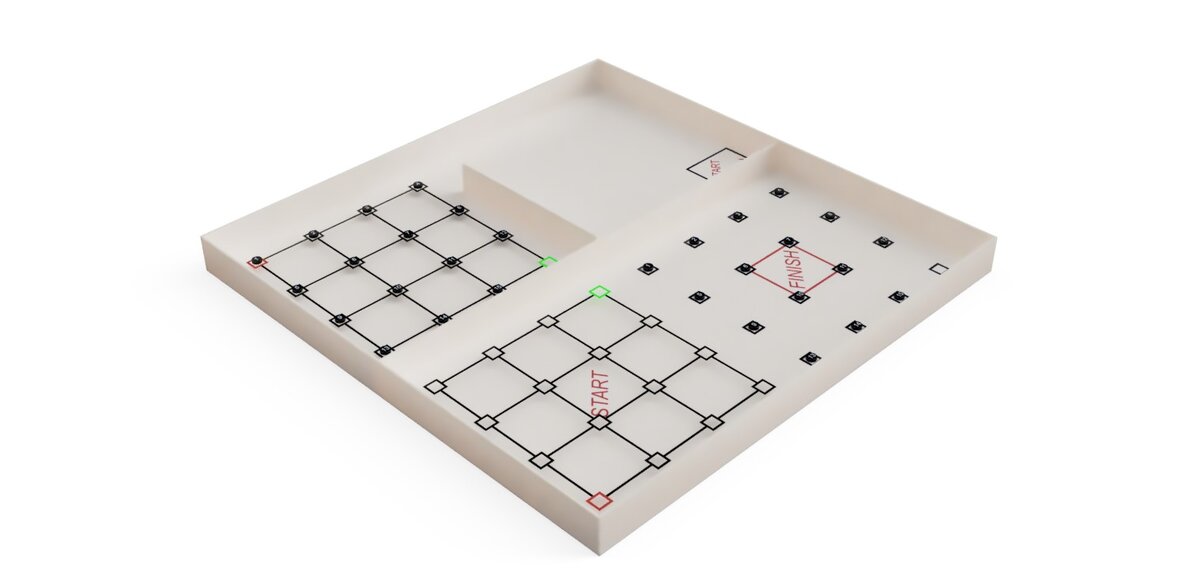
Для начала немного информации о самом задании. Необходимо решить задачу по поиску и распознаванию элементов (хоккейные шайбы с цифрами) на соревновательном поле.
Сам робот должен иметь габаритные размеры, 500 * 500 * 600мм, дабы мог пробраться в самых узких местах лабиринта поля, был способен распознавать объекты и надписи на них. В качестве конструктора для сборки робота может использоваться набор Studica с контроллером VMX.

В рамках выполнения задания предусмотрены следующие форматы работы с роботом
Робот управляется с пульта ДУ оператором, в зоне прямой видимости.
Телеуправление. Изображение, отправляемое на монитор, должно поступать с камеры на роботе, которая функционирует независимо от системы управления. Робот управляется с пульта ДУ оператором, вне зоны прямой видимости.
Автономное. Выполнение задание осуществляется без участия оператора в процессе движения и выполнения манипуляций над объектами робота. Запустили программу - ждем результата без вмешательств участника.
В целом сдача ДЭ (оценка) состоит из нескольких частей:
- анализ технической документации по роботу и визуальный его осмотр.
- выполнение задания в режиме телеуправления
- выполнение задания в автономном режиме
- культурная деятельность участника, соблюдение техники безопасности и временных интервалов
Несмотря на то, что подготовка к экзамену может быть и коллективная, сдача ДЭ осуществляется в одиночку, момент сдачи экзамена фиксируется на видео (youtube), оценка работы ведется несколькими независимыми сертифицированными экспертами.