Современные способы управления компьютером — это мышка, клавиатура, сенсорный экран. Постепенно в жизнь входит управление через жесты, голосом. Компьютер уже умеет следить за нашими зрачками, за направлением нашего взгляда. Следующий этап взаимодействия человека и машины — это прямое считывание сигналов нервной системы, то есть нейрокомпьютерные интерфейсы.
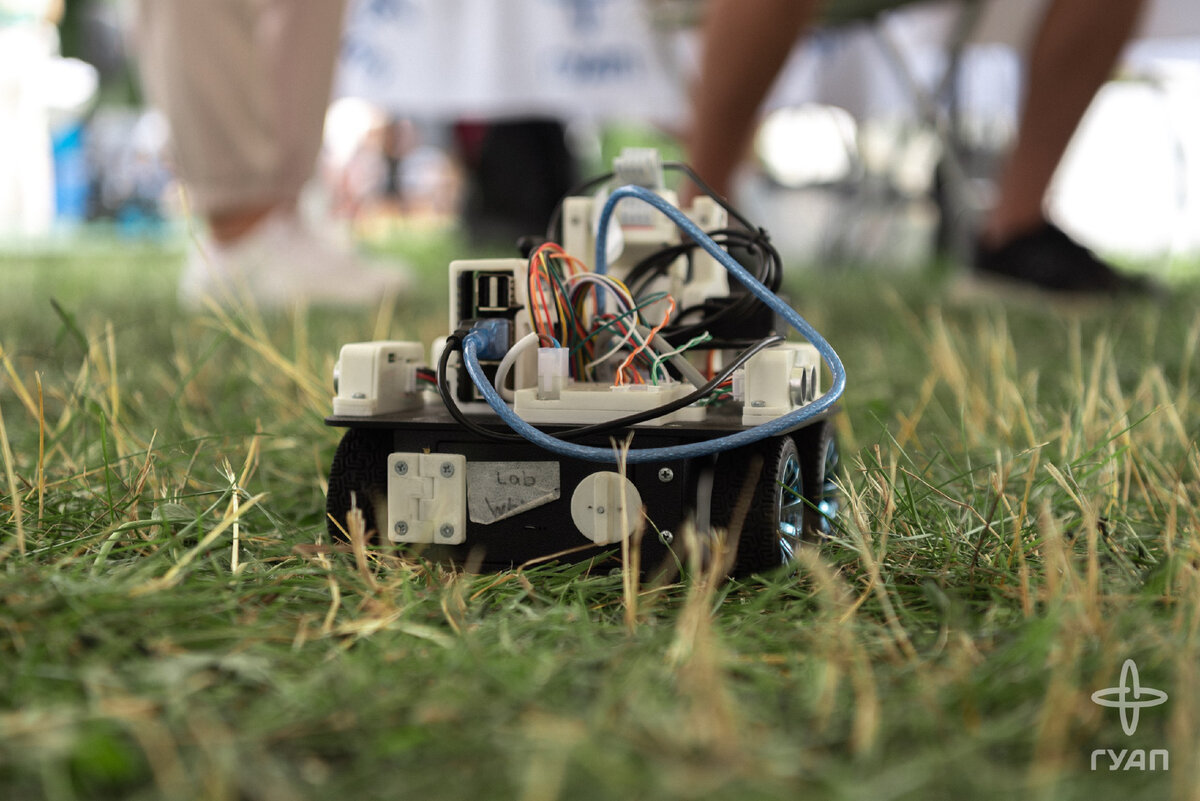
Лаборатория когнитивных исследований ГУАП и Инженерный гараж создали совместную разработку по управлению робототехнической платформой посредством мио- и нейро-интерфесов. Одно из устройств - это нейромашинка, которая управляется силой мысли и сигналами мышечных сокращений. Устройство поворачивает, а также двигается вперед и назад с помощью нейрокомпьютерного интерфейса, когда контроллер принимает сигнал от мозга. Манипуляции посложнее машинка совершает, получая сигналы мышц со специальных контроллеров, закреплённых на руках. Благодаря такому интерфейсу можно управлять замками, умным домом и даже небольшими летательными аппаратами. Подобный интерфейс, а также их комбинация открывает колоссальные возможности по конструированию значительного количества устройств.
Как это работает? Нервная система человека во время работы порождает, передает и обрабатывает электрохимические сигналы в разных частях организма. И электрическую составляющую этих сигналов можно попытаться «прочитать» и интерпретировать.
Нейроинтерфейсы взаимодействуют со всем телом. По сути, мы имеем опосредованное или прямое подключение к нервной системе человека, через которое мы можем получать и посылать некие сигналы.
Второе устройство, которое позволит вам одинаково легко управлять реальным, цифровым и виртуальным миром – это MyoMouse, или миомышь. Когда вы используете это устройство, все буквально зависит от вас, а точнее – от сигналов мышц ваших пальцев.
Миомышь делится на 2 части. Это ремешок с сенсорами, которые регистрируют изменение положения мышц и перемещения кисти в пространстве, а затем преобразуются в привычные жесты для управления различными объектами. А также это съемный модуль с микроконтроллером и другой электроникой, который отдельно подключается к ремешку браслета и определяет его конечное назначение. Интеграции MyoMouse можно использовать для дронов, технологий умного дома, видеоигр и метавселенных.
Данный проект разрабатывался на базе лаборатории автономных робототехнических систем СПб ФИЦ РАН и РуФилмс Иновэтион, а Инженерный гараж и лаборатория когнитивных исследований внедряют данную разработку в учебный процесс.