Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Настройка моторов, Проблемы размещения, Порт приёмника, ELRS, Прошивка контроллера, Запчасти
В самом начале акселерометр коптера не откалиброван, то есть неизвестны точные минимальные и максимальные значения, которые он может выдавать. Поэтому требуется процедура калибровки. Она делается просто. Надо зайти в конфигуратор во вкладку Calibration и нажать Calibrate Accelerometer. Это инициирует саму процедуру. Дальше надо по очереди поворачивать коптер так, как указано на картинках*, и нажимать на кнопку Calibrate.
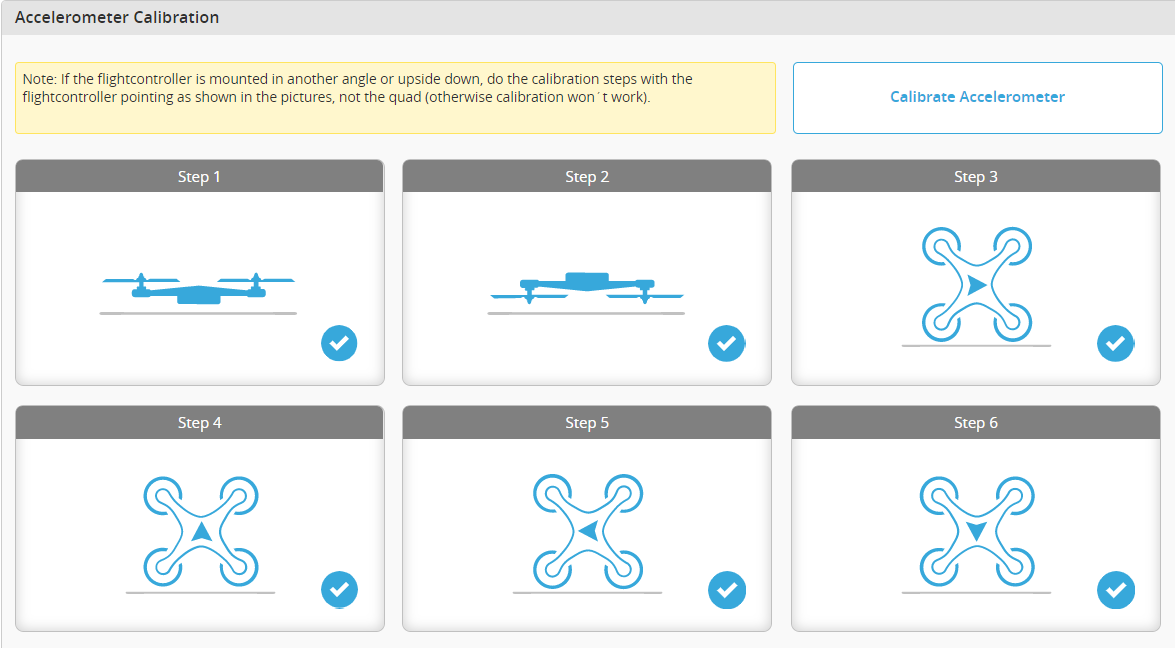
* Это положения не самого коптера, а полётного контроллера, т.к. например у меня полётный контроллер повёрнут. Калибровку можно выполнить и не устанавливая полётный контроллер в коптер.
Потом нужно всё сохранить.
Далее откалибруем регуляторы. Про необходимость и принцип калибровки я уже рассказывал ранее:
Калибровку можно выполнить тремя способами:
- С помощью сигнала на регуляторе
- Через конфигуратор BLHeli Suite, если прошивка регулятора BLHeli и выше
- Использовать регуляторы с прошивкой BLHeli_S или BLHeli_32 и цифровой протокол DSHOT, тогда калибровка не требуется вообще
Калибровка сигналом тяги это самый древний способ и работает на любых регуляторах.
Нужно отключить батарею, зайти в конфигураторе во во вкладку Outputs, включить тест моторов и поднять на максимум ползунок Master (все моторы сразу).
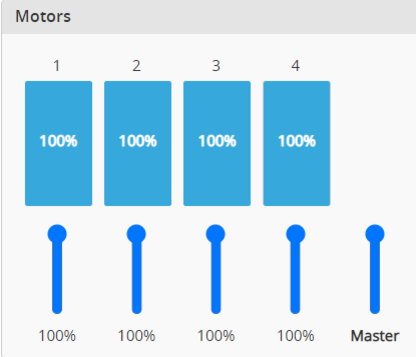
После чего подключить батарею. Если при включении на регуляторы подаётся максимальный сигнал, они переходят в режим калибровки. Звучит специальная звуковая последовательность, и регуляторы фиксируют максимальный уровень. После этого вы опускаете все ползунки вниз, регуляторы пищат ещё раз и фиксируют минимальный уровень. Потом пищат в штатном режиме. Калибровка окончена.
Регуляторы не имеют динамиков, чтобы пищать. Вместо этого они быстро вибрируют моторами, заставляя их издавать звук.
Также можно это сделать в BLHeli Suite, просто вбив руками значения Min и Max в каждый регулятор.
Арминг
Армингом или армом (Arm) называется включение моторов. Они начинают вращаться, но коптер ещё не летит. Противоположное действие – отключение моторов – называется дизарм (Disarm).
Возможно настроить моторы так, что при арме они не будут вращаться, но это очень опасно. Моторы должны вращаться, чтобы визуально можно было понять, что коптер находится в боевом режиме, и принимать меры предосторожности.
Для арминга нужно выделить один из каналов приёмника. В свою очередь, этот канал должен быть связан с каким-то переключателем на аппаратуре. Например, я хочу делать арминг двухпозиционным переключателем D, который управляет каналом 5.
Во вкладке Flight Modes я выбираю 5-й канал для арма (CH5) и растягиваю края диапазона так, чтобы при нижнем положении выключателя значение в канале не попадало в диапазон, а при верхнем попадало. Любой полётный режим активен только тогда, когда значение его канала попадает в заданный диапазон.
Полётные режимы
В полёте коптер может находиться в следующих основных режимах:
- Acro – полностью ручное управление положением коптера
- Angle – автоматическая стабилизация в горизонтальном положении
- AltHold – удержание высоты. Это не отдельный режим, а модификатор, то есть вместе с текущим режимом коптер будет пытаться удерживать высоту. Для работы этого режима нужен барометр.
- PosHold – удержание позиции и высоты. Это отдельный режим, отменяющий действие других режимов. Коптер летает как в Angle, но при отпускании управления держит позицию и высоту. Для работы этого режима нужны GPS, компас и барометр.
Для включения каждого режима есть свой канал и диапазон, аналогично армингу.
Но только не для Acro, так как это режим по умолчанию, если не включено ничего другого.
Под арминг у меня уже занят 5-й канал, поэтому под управление режимами я выделяю 6-й канал, связанный с 3-позиционным переключателем C.
Настраиваю режим Angle. В нижнем положении переключателя он не работает, значит это будет Acro. Начиная со среднего и выше он работает.
- Режим Acro по управлению сильно отличается от привычных бытовых коптеров, которые летают в Angle, и приведёт к аварии в первую же секунду, если вы им не владеете. Поэтому для новичков целесообразно включить Angle на весь диапазон, чтобы Acro не было вообще.
Третье положение переключателя могло бы включать удержание высоты или позиции. Но так как у меня ещё не установлены компас, барометр и GPS, то пока всё. Нужно сохраниться и пробовать летать.
Failsafe
Это программа поведения коптера, когда пропадает связь. Есть четыре варианта, что делать: падать (Drop), приземляться (Land), возвращаться домой (RTH) и ничего не делать.
О возврате домой речи пока нет, ничего не делать тоже глупо. Лучше всего падать. Как только пропадает связь, коптер просто отключает моторы, падает и всё.
Вы скажете, что коптер упадёт и разобьётся. Да, скорее всего так и будет. Но, как правило, коптеры разбиваются не полностью, так что их можно сравнительно легко и быстро починить.
Гораздо важнее, что коптер упадёт там, где возникла проблема, и никуда не улетит.
Если вы выберете посадку, то коптер не разобьётся, а плавно спустится вниз. Но дело в том, что когда нет навигации, его при посадке будет нести куда-нибудь в сторону. И пока он приземлится, его может унести очень далеко. А когда есть навигация, приземляться ему не надо, так как он может просто полететь домой.
Так что у вас выбор – найти разбитый коптер, или не найти никакого.
Кроме того, надо думать о безопасности. Чем дольше коптер активен в неуправляемом виде, тем большую опасность он представляет. Поэтому быстрое падение зачастую лучше всего.
Проверки
Вы можете, не выходя из конфигуратора, подключить батарею и попробовать заармить моторы (БЕЗ ПРОПЕЛЛЕРОВ). Если они включаются и выключаются по вашей команде, то всё хорошо.
Также проверьте Failsafe, выключив аппаратуру при работающих моторах. Коптер, настроенный на падение, должен отключить моторы.
Напоследок нужно зайти во вкладку Setup и убедиться, что все Pre-arming checks (предполётные проверки) в зелёном статусе. Если есть красные пункты, коптер не полетит.
Обратите внимание на статус Navigation is safe (Навигация безопасна) и Compass calibrated (компас откалиброван). Это не значит, что у коптера есть навигация. Просто сейчас отсутствуют GPS и компас, поэтому данные статусы зелёные по умолчанию. Если бы навигация реально была, то статус стал бы зелёным только тогда, когда GPS поймал бы достаточно спутников и зафиксировал домашнюю точку.
Что ж, сейчас можно реально взять и полететь, но придётся ещё оттянуть этот момент, так как очень многие собранные коптеры терпят аварию при первом же старте.
Читайте дальше: