Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: Порт приёмника, ELRS, Прошивка контроллера, Запчасти
Самый быстрый способ поднять квадрокоптер в воздух – настроить приёмник, припаять моторы и регуляторы, и вот уже можно лететь. Если после этого квадрокоптер нормально летает, значит можно продолжать делать всё остальное – ставить камеру, видеопередатчик, GPS.
Если же не летает, значит вы сэкономили себе время и ресурсы.
Монтаж полётного контроллера
Ранее я уже говорил, что выбранная рама KK260 не имеет никаких стандартных креплений и абсолютно бестолкова.
Также я собираюсь использовать видеопередатчик с размером стека 30.5*30.5, в то время как контроллер имеет размер 20*20. Проблему я решил, прокрутив в днище отверстия под оба стека. Стек 20*20 будет на металлических винтах M2, а 30.5*30.5 на нейлоновых стойках M3.

Есть один нюанс: 20*20 это размер только для крепления, а сам компонент может быть существенно больше, и может упереться в стойки стека 30.5*30.5. К счастью, в данном случае всё хорошо.
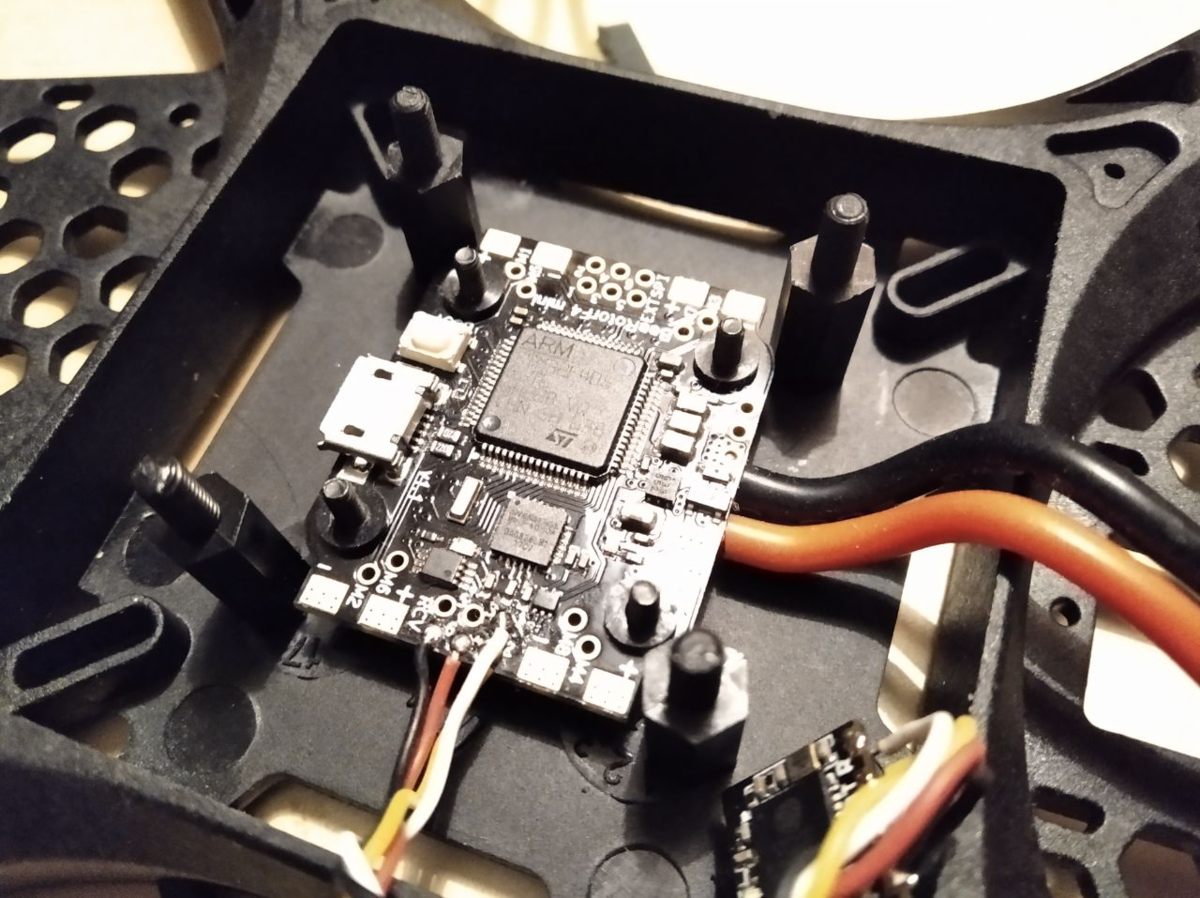
Обратите внимание, что контроллер стоит на резиновых втулках (они идут в комплекте). Они смягчают вибрации, и также изолируют контроллер от металлических винтов (хотя это и не требуется).
Также нужна проверка высоты стека с надетой крышей:
Это тот объём пространства, с которым я могу работать. Как можно заметить, крыша сделана максимально бездарно. В ней проделаны какие-то треугольные прорези, из-за которых на крышу ничего нельзя прикрепить. Не менее бездарны ячеистые отверстия в выступах рамы, которые не годятся вообще ни на что ни размерами, ни расположением.
Это ещё не все проблемы. Во-первых, в разъём USB контроллера невозможно вставить кабель, так как мешает бортик рамы.
Во-вторых, контакты питания у полётного контроллера находятся сбоку. После некоторых раздумий контроллер я решил расположить боком, чтобы провода смотрели назад. Это потребует специальных настроек в дальнейшем.
Со стороны контроллера паяются два провода с разъёмом XT60 "папа".
Совет: от нагрева металлические штырьки могут размягчить пластиковый корпус и перекособочиться, что сделает разъём негодным. Поэтому паять его надо, вставив в "маму". Это надёжно зафиксирует штырьки и обеспечит дополнительный теплоотвод.
Обратите внимание, что я совершил ошибку: припаял плюсовой (красный) провод к минусовому контакту. И это несмотря на то, что специально для данной статьи я старался не ошибиться, и несмотря на то, что я паяю эти контакты уже несколько лет. Так что требуется предельная внимательность.
Точно также нужно не перепутать провода, припаивая их к полётному контроллеру.
С пайкой моторов и регуляторов у данной рамы всё хорошо: моторные провода проходят через отверстие в луче на обратную сторону луча, где в специальной выемке крепится на скотч регулятор.
Регуляторы приходят в таком виде:
То есть к ним уже припаяны довольно длинные провода. Само собой, их придётся укорачивать. Также сигнальная линия представляет собой пару проводов (сигнал и земля), заканчивающуюся серво-разъёмом (да, опять наследие самолётов). Разъём не нужен, и провод сигнальной земли тоже не нужен (есть общая земля от батареи). Почему тогда он присутствует? Потому что так правильнее, когда провода длинные, но в моём случае это по барабану. Сигнальный провод будет очень коротким.
Чтобы не кромсать годные провода, которые ещё послужат, я просто отпаяю их все и припаяю обрезки других проводов нужной длины. Провода мотора придётся тоже обрезать.
Да, вместо красного припаял синий, потому что были такие :) Разницы нет.
От регулятора опять же через отверстия провода тянутся к полётному контроллеру.
Обратите внимание, что ни один провод, идущий к полётному контроллеру, не должен быть внатяжку. Они должны свободно провисать. Если провода будут натянуты, то вибрации корпуса будут передаваться через них на полётный контроллер, и кроме того натяжение со временем приведёт к разрушению провода.
Один мотор готов, и то же самое нужно сделать для оставшихся. Но когда будут припаяны все 4, полётный контроллер уже не получится снять. Поэтому сначала я припаяю все необходимые провода с обратной стороны полётного контроллера, а также обеспечу доступ к USB.
Читайте дальше: