Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущие части: ELRS, Прошивка контроллера, Запчасти
Вот и настал момент, когда нужно самостоятельно разобраться с полётным контроллером – где у него что, и что куда подключать. В сборочных видео вам обычно показывают конкретные действия – припаяй этот провод сюда. Конечно, если в точности повторять показанное, то ваша сборка тоже будет работать. Однако это порочная методика. Необходимо уметь разбираться с любым полётным контроллером, даже если вы видите его впервые.
Для начала нужно добыть схему контроллера:

Видно, что с этой стороны контроллера есть порт UART2 (RX2, TX2), а также половина порта UART3 (RX3). Доступен только принимающий контакт (RX3), но нет передающего (TX3).
Посмотрим на обратную сторону контроллера:
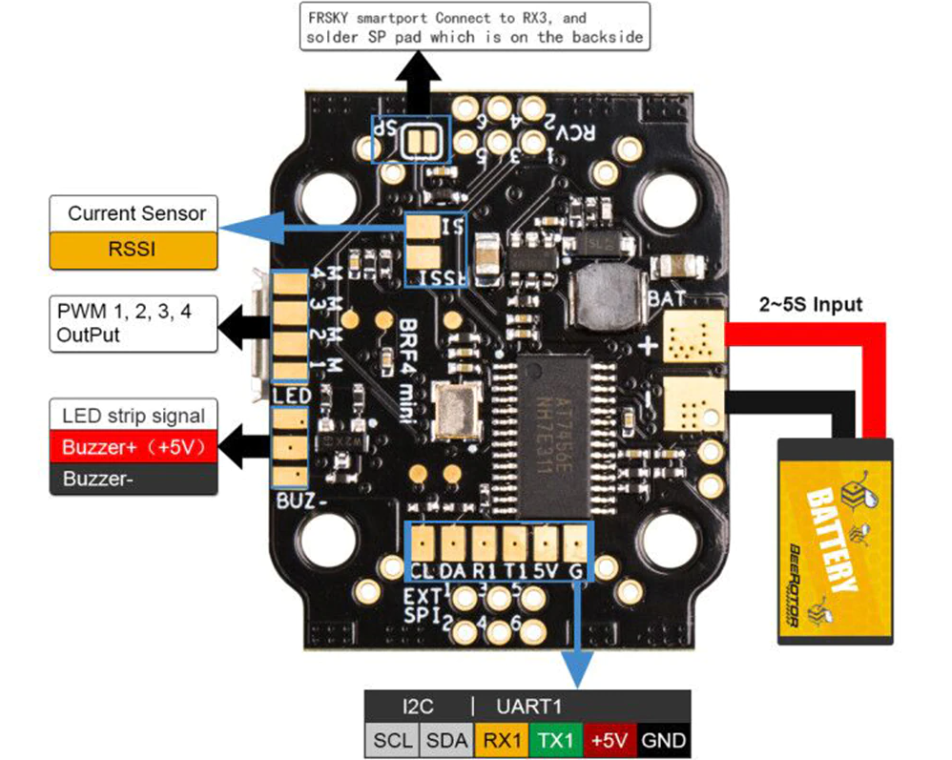
Здесь есть порт UART1 (RX1, TX1) и шина I2C (SCL, SDA).
Куда паять приёмник?
Приёмник должен быть припаян к какому-то UART, для этого у него есть передающий и принимающий контакт (TX, RX):
При этом контакт TX для приёмника является передающим, а для контроллера – принимающим. Т.е. TX приёмника должен паяться к RX контроллера.
Этого достаточно для работы, но есть ещё RX приёмника. Он предназначен для того, чтобы полётный контроллер слал на приёмник данные телеметрии, а приёмник передавал бы их на аппаратуру, а аппаратура показывала бы их на экране. Если вы летаете в очках, то на экран всё равно не смотрите. Но аппаратура может предупредить вас звуковым сигналом, если какой-то параметр стал критическим.
RX приёмника нужно припаять к TX контроллера.
Итак, UART3 на контроллере отпадает, потому что у него доступен только RX. Остаются UART1 и UART2. Какой выбрать?
Вроде бы любой, но на схеме мы видим инструкцию, что SBUS/PPM/DSMX нужно припаивать к RX2. Что это значит?
SBUS – протокол передачи данных между приёмником и полётным контроллером, и у него есть одна особенность. Чаще всего SBUS используется в приёмниках FrSky, но патентом владеет Futaba, из-за чего FrSky инвертирует сигнал SBUS.
Чтобы протокол работал корректно, на порту UART2 применяется аппаратный инвертор, который инвертирует сигнал обратно. Значит, если вы используете приёмник SBUS, то паять его надо только к RX2, потому что на других портах нет инвертора (речь конкретно про этот контроллер).
- Это актуально только для контроллеров F4, так как контроллеры F7 умеют работать и с инверсией, и без на любых портах.
Мой приёмник работает по протоколу CRSF (CrossFire). Это не SBUS, и значит я могу припаять его к UART1. Но тогда не смогу ничего припаять на UART2, так как там инвертор не позволит нормально работать, например, GPS. Поэтому я буду паять приёмник к RX2/TX2. Чтобы он работал правильно, в настройках ELRS-прошивки для приёмника есть опция инверсии, но она оказалась не нужна – приёмник как-то разобрался с этим сам.
Тогда на UART1 я припаяю GPS, на I2C барометр и компас, а на RX3 я бы припаял управление видеопередатчиком. Но мне нужен не RX3, а TX3, которого нет. Так что это пока откладывается, может потом удастся разобраться.
Все порты на этом кончились, но больше мне ничего и не нужно.
Так что припаиваю приёмник к контроллеру в соответствии со схемой:
Включаю питание через USB, приёмник через 60 секунд переходит в режим Wi-Fi (быстрые моргания светодиода). Я присоединяю компьютер к сети ExpressLRS RX, открывается веб-страница по адресу 10.0.0.1, и на этой странице я закачиваю ранее приготовленный файл прошивки в приёмник.
Теперь у приёмника и передатчика одинаковая версия прошивки с одинаковым кодовым словом, и они сами находят друг друга.
Порты в конфигураторе
Самое время зайти в INAV Configurator и продолжить настройки.
Во вкладке Ports должна быть такая картина:
То есть на UART2 включён серийный RX-протокол, остальные UART пока свободны.
После чего нужно нажать Save and Reboot.
Далее нужно пойти во вкладку Receiver и установить тип приёмника SERIAL и протокол CRSF:
После чего нужно нажать Save and Reboot.
И наконец ещё раз зайти во вкладку Receiver и пошевелить стиками аппаратуры и пощёлкать переключателями. При этом полоски каналов должны двигаться. Это означает, что приёмник и аппаратура успешно связаны, и значения каналов поступают от приёмника в полётный контроллер.
Вы можете заметить, что каналы меняют значение, но неправильно. Допустим, вы увеличиваете тягу, а вместо этого изменяется крен или тангаж.
Это уже зависит от конкретной аппаратуры и связано с назначением первых 4-х каналов. Они называются A, E, T, R, или Ailerons, Elevons, Throttle, Rudder (элероны, элевоны, тяга, руль направления). Те самые 4 управляющие воздействия, про которые я писал в самом начале. Конечно же, от самолётов. И в аппаратуре каждому из них назначен канал. Так, схема AETR означает, что первый канал это A, второй Е, третий T и четвёртый R. Аппаратура может быть настроена так, что схема каналов будет ETAR, ATER, TAER и т.д.
А в конфигураторе эта схема тоже задаётся и должна быть такой же, как в аппаратуре:
Большая часть дела сделана. Имея работающий приёмник, я могу уже паять моторы и регуляторы и начинать летать.
Читайте дальше: