Предыдущие подборки: Квадрокоптер в деталях, Подбор компонентов, Введение
Предыдущая часть:
Полётный контроллер нужно первым делом прошить. Почему первым делом? Пока к нему ничего не припаяно, он находится в состоянии "как из магазина", и поэтому, если случится какая-то неприятность, у вас будет возможность его обменять.
Сжечь или испортить его при этом нереально, если только в нём нет изначального брака.
INAV или BetaFlight
Я буду ставить прошивку INAV 5. В FPV-хобби это вторая по популярности прошивка после BetaFlight. Почему тогда не BetaFlight? Потому что мне будут нужны возможности GPS-навигации, которых нет у BetaFlight.
В целом обе прошивки довольно похожи друг на друга, так как имеют общего предка – CleanFlight.
Если вы научитесь прошивать и конфигурировать INAV, то без проблем сможете сделать то же самое с BetaFlight, и наоборот.
Конфигуратор
Чтобы прошивать и настраивать полётный контроллер, необходимо установить программу INAV Configurator. (А для BetaFlight – BetaFlight Configurator.)
Обратите внимание на версию конфигуратора. Он работает с прошивками соответствующей версии. Если вы хотите прошить INAV 3, то конфигуратор тоже нужен версии 3, если 4, то 4 и т.д. На данный момент последняя версия это 5.0, её я и возьму.
В конфигураторах разных версий постоянно что-то меняется – одни параметры убирают, другие добавляют, переносят настройки в другие места интерфейса и т.д., но в принципе всё остаётся тем же, так что разобраться можно.
Драйвера
После запуска конфигуратора вы увидите вот такой экран:
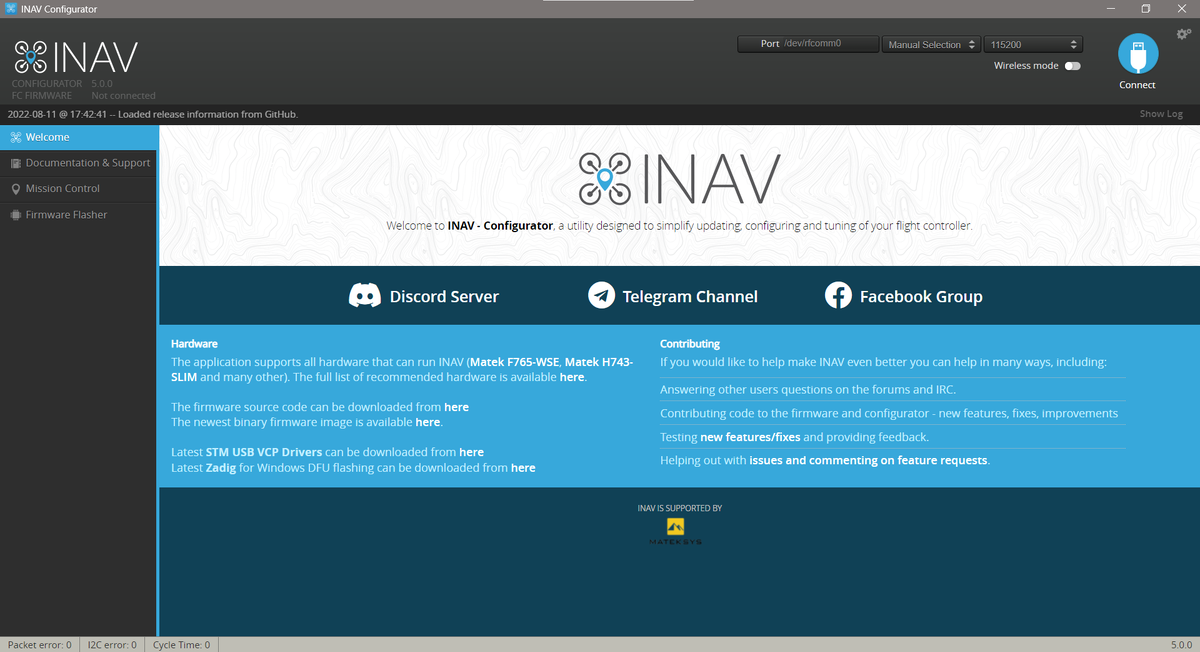
Первое, что нужно сделать – установить драйвера для виртуального USB COM-порта (если они ещё не установлены). Для вашего удобства ссылки есть прямо в конфигураторе.

Первая ссылка – для подключения к USB полётного контроллера, и с ней обычно нет проблем (или она даже бывает не нужна), а вторая – для прошивки в режиме DFU (Direct Firmware Update). Там скачивается утилита Zadig, с помощью которой ставятся драйвера. Я не помню этот процесс, так как когда-то просто поставил и забыл (подсказка: в интернете есть куча описаний и роликов).
После этого запускаем конфигуратор, зажимаем на контроллере кнопку BOOT и подключаем его к компьютеру кабелем USB. Если всё хорошо, мы увидим заветные буковки DFU в панели подключения:
Кнопку Connect при этом нажимать не нужно, она не для этого!
Теперь нужно выбрать в левом меню пункт Firmware Flasher:
А затем выбрать полётный контроллер (Board) и версию прошивки (Firmware Version):
Мой полётный контроллер BeeRotor F405 Mini обозначен как BEEROTORF4, и я также выбрал версию 5.
Имейте в виду, что контроллеры отличаются набором портов, встроенной периферией и схематикой. Поэтому, хотя прошивка одна и та же, под каждый контроллер она компилируется отдельно, со своими настройками. Прошивка для одного контроллера не будет работать на другом, или будет работать криво. Именно поэтому нужно выбирать правильный контроллер.
Для любых контроллеров в первую очередь делаются прошивки BetaFlight. Для вашего конкретного контроллера правильной прошивки INAV может просто не быть. Это надо выяснять заранее.
Также бывает, что для какого-то контроллера подходит прошивка, скомпилированная для другого контроллера. Например, ваш контроллер может быть NOXE V1, а прошивка для него подойдёт от Matek F411 или FlyWoo. Это тоже можно выяснить заранее, почитав описания и отзывы.
- Перед прошивкой нужно включить опцию Full Chip Erase, чтобы в памяти контроллера не осталось никаких данных от прошлой прошивки.
Далее выбранную прошивку нужно скачать из интернета, нажав на кнопку Load Firmware [Online]:
Или, если она есть в виде файла на вашем компьютере, используйте кнопку Load Firmware [Local].
После загрузки прошивки станет доступна кнопка Flash Firmware. Нажимаете на неё, немного ждёте... и всё!
Контроллер автоматически выйдет из DFU-режима, и теперь в панели соединения появится некий COM-порт. Вам остаётся только нажать кнопку Connect, чтобы попасть внутрь конфигуратора.
Первичная инициализация
Сразу после входа INAV предложит вам выбрать некие значения по умолчанию:
Это значения для разных моделей: квадрокоптера, самолёта, летающего крыла, ровера или лодки (да, INAV можно поставить и на лодку). Так как в опциях коптера доступен только миникоптер 3-7 дюймов, то выберем его.
После этого произойдёт перезагрузка контроллера, и вы наконец попадёте на первую вкладку конфигуратора – Setup – и увидите на экране трёхмерную модель квадрокоптера:
Эта модель должна наклоняться и вращаться, когда вы наклоняете и вращаете полётный контроллер. Это значит, что
- Прошивка выбрана правильно (ну, или почти правильно)
- Акселерометр и гироскоп работают
Далее предстоит сделать много дел:
- откалибровать акселерометр
- включить и настроить моторные выходы
- настроить порты для приемника, GPS, видеопередатчика
- настроить каналы приёмника
- настроить микшер
- откалибровать регуляторы
- настроить тягу висения
- настроить Failsafe
- настроить навигацию
- настроить полётные режимы
- настроить PID и фильтры
Читайте дальше: