Ученые из Университета Ульма разработали новую модель, которая позволяет беспилотнику быстро и точно оценивать быстро меняющуюся среду и безопасно двигаться плотном трафике. При этом удалось сократить требования к вычислительным ресурсам и время обработки визуальной информации.

Метод описанный в статье ученых из Университета Ульма в первую очередь является очень экономичным, - он не требует большого объема вычислений.
Сегодня главным устройством обзора у беспилотника является вращающийся лидар, который на большой скорости снимает все пространство вокруг машины. Ученые называют такой подход "наивным". Водитель ведь не смотрит постоянно в зеркало заднего вида, - у него всего два глаза. Картинка, получаемая лидаром, требует постоянно больших вычислений, которые в основном не нужны. Если вычисления сократить, то можно анализировать картинку и быстрее, и точнее.
Как сэкономить на вычислениях и не потерять в уровне безопасности
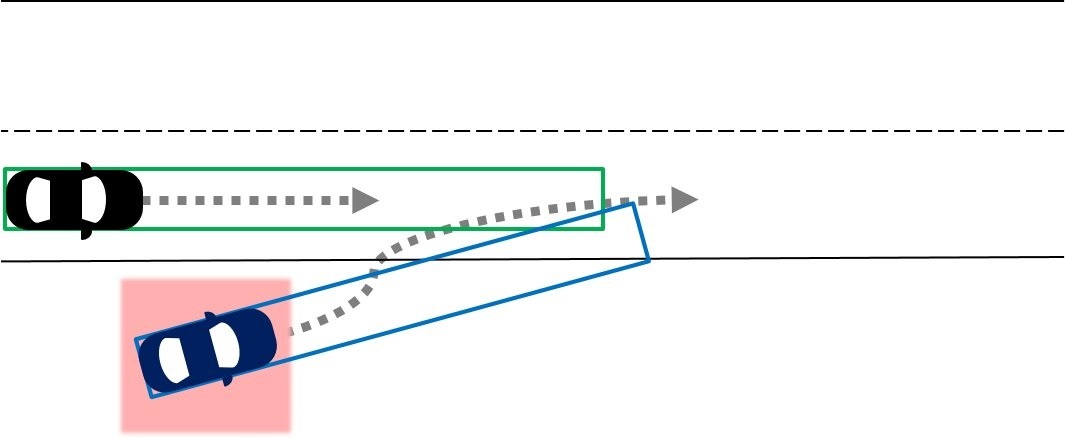
Ученые предлагают другой подход. Все пространство вокруг машины делится на кластеры, некоторые из которых помечаются, как потенциально опасные (смотрите на картинке). Внимание сосредотачивается только на опасных зонах, и камеры следят именно за ними. Оценка опасности происходит онлайн без заранее подготовленных карт. Оценка меняется динамически и зависит от скорости потенциально опасного участника движения. Ученые считают, что повышение скорости обработки потенциально опасных зон и участников движения, даст существенный выигрыш из-за резко возрастающей скорости обратки данных. Это же может привести к удешевлению самих устройств слежения за дорогой (можно обойтись без кругового лидара).