Предыдущие подборки: Подбор компонентов, Введение
Предыдущие части: Регулятор оборотов, Бесколлекторный мотор, Полётный контроллер
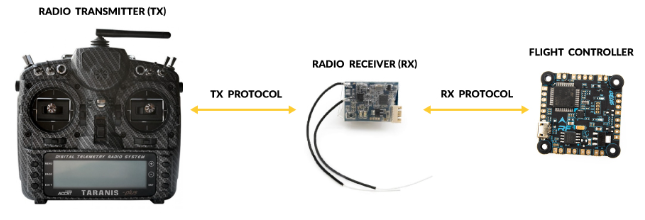
Чтобы управлять коптером, необходимы два компонента: аппаратура радиоуправления (в просторечии пульт, аппа) и приёмник радиосигнала.
Аппаратуры мы пока трогать не будем, а рассмотрим приёмники. Их существует огромное количество вариантов, и поэтому при выборе приёмника нужно быть особенно внимательными.
Рабочие частоты
Для управления традиционно используется частотный диапазон 2.4 ГГц. Он обеспечивает дальность связи в среднем до 1 км. Есть также специальные частоты для дальней связи (десятки километров): 915 МГц и 433 МГц.
TX-Протокол
Естественно, что каждый приёмник имеет в паре определённую аппаратуру, и оба они работают по одному протоколу. Протокол между аппаратурой и приёмником называется TX-протокол.
Например, приёмник DJI работает только с пультом DJI, приёмник Syma работает только с пультом Syma и т.д.
В среде FPV есть, однако, ограниченное число установившихся протоколов, из-за чего пульты и приёмники разных производителей на самом деле поддерживают один и тот же протокол и поэтому совместимы между собой.
Основные протоколы, а точнее, бренды протоколов, это:
- FrSky
- FlySky
- RadioLink
- Futaba
- Spektrum
- CrossFire (CRSF)
- ExpressLRS (ELRS)
Часть из них процветала ещё для самолётов и имеет широкое распространение, но непопулярна именно для коптеров.
Поэтому мы рассмотрим только актуальные на данный момент, и только для коптеров.
1. FrSky
Изделия этой фирмы лидируют на рынке, хотя в последнее время сдают позиции. Причин тому две: множество клонов и политика фирмы, направленная на защиту от клонов. Вследствие чего появляются несовместимые друг с другом варианты и версии приёмников и прошивок.
Приёмники выпускаются в широком ассортименте для диапазонов 2.4 ГГц и 915 МГц. Также есть много клонов на 2.4 ГГц (Jumper, RadioMaster).
2. CrossFire
Разработка гонконгской команды пилотов Team Black Sheep, данный протокол работает в диапазоне 915 МГц и имеет большую дальность связи.
Ассортимент приёмников в основном состоит из разных размеров, от крупного до "нано". Отличное качество и характеристики, но высокая стоимость и замкнутая экосистема.
3. ExpressLRS
Относительно новый протокол связи, где в приёмниках и пультах используется открытая прошивка.
Использует диапазоны 2.4 ГГц и 915 МГц. Так как вся архитектура открытая, разные производители уже понаделали разных приёмников.
Благодаря оптимизированному протоколу отмечается высокая дальность связи даже на 2.4 ГГц.
ELRS становится современным стандартом связи для квадрокоптеров.
Каналы
Важно обращать внимание на количество каналов приёмника. Что это такое?
Для каждого управляющего воздействия на коптер (как мы знаем, их 4: тяга, курс, крен, тангаж) назначается один канал передачи. В одном канале мы можем передавать одно значение. Имея 4 канала, мы можем передавать 4 значения сразу. Например, тяга 100, крен 5, курс 150, тангаж 0.
Значит, нужно минимум 4 канала, но по факту нужны ещё – для запуска и остановки моторов, для переключения полётных режимов. То есть их должно быть минимум 6, а лучше 8 и больше.
Количество каналов зависит как от радиопротокола, так и от конкретного приёмника. Например, протокол может иметь 16 каналов, а приёмник только 8, или наоборот.
RX-Протокол
Получив значения каналов из эфира, приёмник должен передать эти значения на полётный контроллер через провода. Для этого используется ещё один протокол, который называется RX-протокол.
Приёмники разных производителей и моделей могут использовать различные протоколы: PWM, PPM, SBUS, iBUS, CRSF и т.д.
В принципе можно пока в это не углубляться, так как прошивки полётных контроллеров поддерживают все популярные протоколы и нужно только припаять сигнальную линию приёмника к нужному контакту.
Единственно заостримся на PWM и PPM.
C PWM мы уже знакомы, и можно догадаться, что приёмник выдаёт цифровые значения каналов, закодированные в PWM. Но для этого нужно иметь по отдельному контакту на каждый канал. Если у приёмника 8 каналов, то должно быть 8 контактов, где каждый канал закодирован в виде PWM.
Есть гибридные приёмники, которые могут отдавать, например, 2 канала в виде PWM, а остальные каналы в другой протокол.
Для чего это надо?
Как и многое другое, такая традиция пришла с самолётов. Дело в том, что самолёт летит очень устойчиво и плавно, и поэтому ему не нужен полётный контроллер. Тягой и закрылками человек может управлять напрямую. Поэтому выходы PWM приёмника присоединялись непосредственно к регулятору оборотов и к сервомоторам. Это прямое управление.
Квадрокоптером так управлять невозможно, он крайне неустойчив, и справиться с этим может только электронный мозг. Кроме того, на полётном контроллере обычно нет места для множества контактов PWM.
Поэтому протоколы обмена с полётным контроллером практически всегда серийно-цифровые (SBUS, iBUS, CRSF), и используют один из UART-портов.
Что касается дополнительных PWM-выходов на некоторых приёмниках, их можно использовать также для прямого управления, но не коптером, а например подвесом камеры: наклонить камеру вниз или вверх и т.п.
PPM
Протокол PPM такой же старый, как и PWM, и означает Pulse Position Modulation. Вместо ширины импульса используется позиция импульса во временной сетке, чтобы передать число. Этот протокол позволяет через один провод передавать последовательно до 8 каналов. Хотя он устарел, можно до сих пор найти PPM-приёмники, а также PPM-контакты на полётных контроллерах. Правда, это не гарантирует, что прошивка полётного контроллера будет поддерживать PPM, так как в них постепенно удаляют устаревшие технологии.
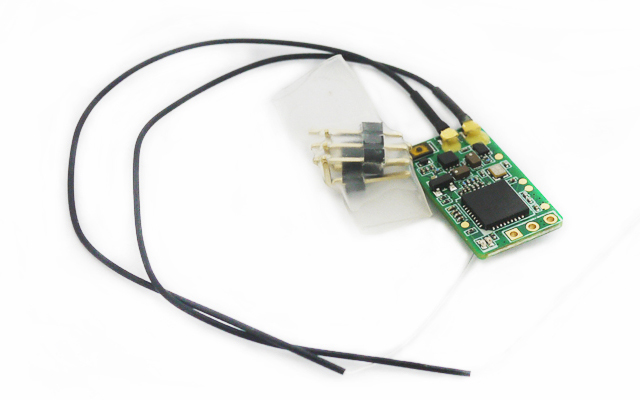
Дайвёрсити (Diversity)
Это в переводе означает "разнообразие" и в наше время относится к количеству негров и представителей ЛГБТ в рабочем коллективе.
В отношении приёмников это означает, что вместо одной антенны есть две. Они ориентируются под разными углами, и приёмник автоматически выбирает ту антенну, на которой лучше сигнал. Поэтому дайвёрсити-приёмники обычно обеспечивают лучшую дальность связи. Определить их можно как раз по наличию двух антенн.
Телеметрия
Это передача служебных данных. То есть приёмник не только принимает сигнал управления, но и передаёт другой сигнал.
В телеметрию могут входить: оценка качества связи, заряд батареи, GPS-координаты, скорость, высота и т.п.
Всё это приёмник передаёт назад на аппаратуру, а аппаратура показывает у себя на экране. Это также пришло с самолётов, которыми можно было управлять, даже не видя их, а просто следя за телеметрией ("по приборам").
Не каждый приёмник оснащён телеметрийными возможностями, а у многих они ограничены только качеством принимаемого сигнала – RSSI, Received Signal Strength Indicator. Чем хуже качество, тем больше вероятность, что связь будет потеряна. Поэтому это довольно важный параметр.
Но не жизненно важный, так как у коптеров есть другие возможности.
Читайте дальше: