Авторы: Олейников В.С., Щербина А.Н.
PID-регуляторы применяются в системах автоматического регулирования для формирования управляющих сигналов, поступающих на объект управления, для достижения требуемых качеств переходного процесса. В таких системах формируется три (или меньше, смотря какая структура регулятора необходима) суммирующихся составляющих сигнала
При сильных изменениях параметров системы управления, при ее нелинейностях, при недостатке информации, описывающей объект управления, PID-регуляторы имеют плохие показатели качества [1]. Даже если при настройке PID-регулятора для системы управления были достигнуты на оптимальные переходные характеристики, то при некоторых параметрических изменениях системы она может потерять устойчивость или приобрести неудовлетворительные переходные характеристики [2]. Для улучшения характеристик управления часто прибегают к методам нечеткой логики
Считается, что настройка нечетких регуляторов, как составление нечетких правил, является достаточно трудоемкой задачей.
Как правило, управление системами при помощи нечетких регуляторов часто используют при недостатке информации об объекте управления и наличии опыта работы с данной системой квалифицированного персонала. Нечеткое регулирование используют в нелинейных системах, в системах с достаточно трудоемкой идентификацией. Примером может служить любая достаточно нетиповая сложная технологическая система, которая не имеет математического описания или математическая модель, которой, очень сложна, но имеется большой опыт управления данной системой.
PID-регуляторы, работающие совместно с нечетким регулированием, сегодня встречаются довольно часто в бытовой технике, при управлении автомобилями, при поддержании климата в помещениях, при регулировании наведения телевизионных камер.
С целю улучшения качества регулирования и повышения энергоэффективности было принято решение по модернизации системы управления воздухоподготовки горелок котельного зала городской котельной Соснового Бора с минимальными затратами. Вследствие минимизации затрат, модернизацию необходимо произвести без применения дополнительного оборудования.
В котельном зале имеются два водогрейных котла, на каждый котел приходится по две горелки. Вся система подготовки воздуха состоит из шести теплообменных аппаратов, по одному теплообменнику приходится на каждую горелку для отдачи тепловой энергии воздуху, два других – для поддержания температуры гликоля (горячего теплоносителя). Каждый из четырех теплообменных аппаратов подогрева воздуха соединён с остальными только горячим контуром. Для процесса регулирования такая связь может создавать помехи и параметрические изменения. Может изменятся и расход воздуха на горелку, что так же влечет за собой параметрические изменения системы регулирования.
Исходя из уравнений закона сохранения энергии, в среде Simulink [3] была построена модель теплообменного аппарата. Работу системы теплообменного аппарата можно описать системой дифференциальных уравнений в частных производных [4].
Для целей разработки и исследования системы с нечетким регулированием [5], были построены две системы, одна из которых регулировалась по температуре выходного воздуха, а вторая регулировалась по температуре выходного воздуха и по температуре входного гликоля в горячем контуре, как показано на рисунке ниже.
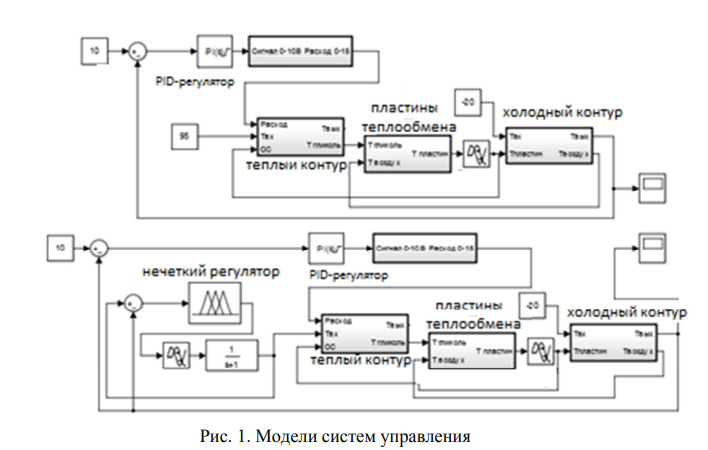
Для сравнения системы с PID-регулированием и системы с PID-регулированием, дополненным нечетким регулятором, были произведены компьютерные эксперименты с обоими видами регулирования. Для системы с PID-регулятором эффективность процесса теплообмена меньше, чем у системы с нечетким регулятором. Кроме этого, замечены улучшения в переходном процессе. При моделировании были заданы начальные условия, при которых температура системы равнялась температуре воздуха в котельном цеху. На графиках ниже (рис. 2, 3) виден момент открытия внешних задвижек, при которых холодный воздух начинает поступать в систему.
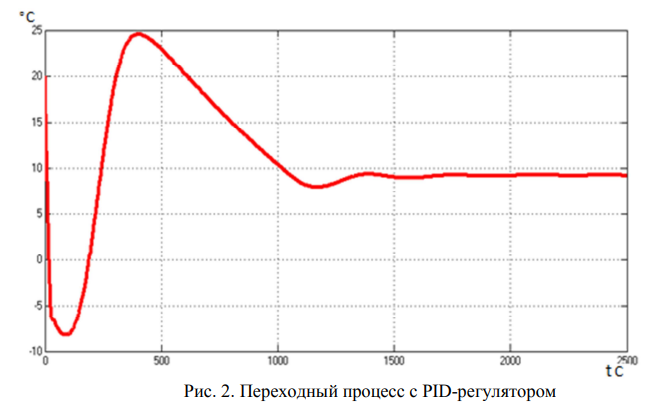
Выводы. Как видно из рис. 2, при регулировании при помощи PID-регулятора, имеет место достаточно большое перерегулирование, что отсутствует при регулировании при помощи PID-регулятора и нечеткого регулятора (рис. 3), что показывает преимущество системы регулирования с применением нечеткого регулятора. В системе с PID-регулятором в момент второго выброса температура достигает 25˚С при уставке 10˚С. При тех же условиях, в системе, дополненной нечетким регулятором, второй выброс достигает 11˚С при уставке 10˚С.
В процессе работы, на основе математической модели теплообменного аппарата, была разработана система регулирования с использованием PID- и fuzzy-регуляторов, позволяющая повысить КПД теплообменного аппарата, это позволило повысить качество регулирования, не устанавливая дополнительного оборудования.
ЛИТЕРАТУРА:
1. Денисенко В. В. ПИД-регуляторы: вопросы реализации. // СТА. В записную книжку инженера. – 2008. – №1. – с.86-99.
2. Лурье Б. Я., Энрайт П. Дж. Классические методы автоматического управления. СПб., БХВПетербург, 2004. – 640 с.
3. Дьяконов А. П., Круглов В. В. MATLAB. Математические пакеты расширения. Специальный справочник. СПб.:Питер, 2001. 480с.
4. Основные отношения для противоточных и прямоточных теплообменников [Электронный ресурс].- http://twtmas.mpei.ac.ru/mas/Worksheets/Solodov/ Chapt_24_Basic Eq for HeatExchanger.html.
5. Нечеткая логика, нейронные сети и генетические алгоритмы [Электронный ресурс].- http://bookasutp.ru/Chapter5_7.aspx#FuzzyControl