Ученые из Университета Гамбурга разработали систему обучения, которая позволяет роботизированной руке учиться тонким и точным движениям, просто глядя на руку человека. Робот может по положению локтя и движению суставом оценить, как лучше расположить захват и какую следует приложить силу при выполнении действия.

В последние годы робототехники разрабатывают все более совершенные роботизированные системы, многие из которых имеют искусственные руки с несколькими пальцами. Для выполнения повседневных задач как дома, так и в общественных местах роботы должны уметь использовать свои «руки».
Однако обучение робота движению руки и пальцев остается сложной задачей. Это непростой навык даже для человека: все предметы разные, и чтобы их захватить нужно правильно оценить их форму и вес.
Исследователи из Университета Гамбурга представили новый подход к обучению роботизированной руки с несколькими пальцами. Это подход позволяет роботизированной руке учиться у людей, получая только визуальную информацию от камеры. Робот видит положение пальцев, угол сгиба локтя, окружающие предметы. Нейросеть обучается правильным движениям, постоянно сверяясь с движениями человека и уточняя положение руки робота.
Ученые отказались от перчаток, покрытых датчиками, на руках человека, поскольку движение в перчатке сковано, а нужно, чтобы рука человека двигалась естественным образом. И они добились, чтобы роботу для обучения было достаточно захвата движения камерой.
Какое приложить усилие
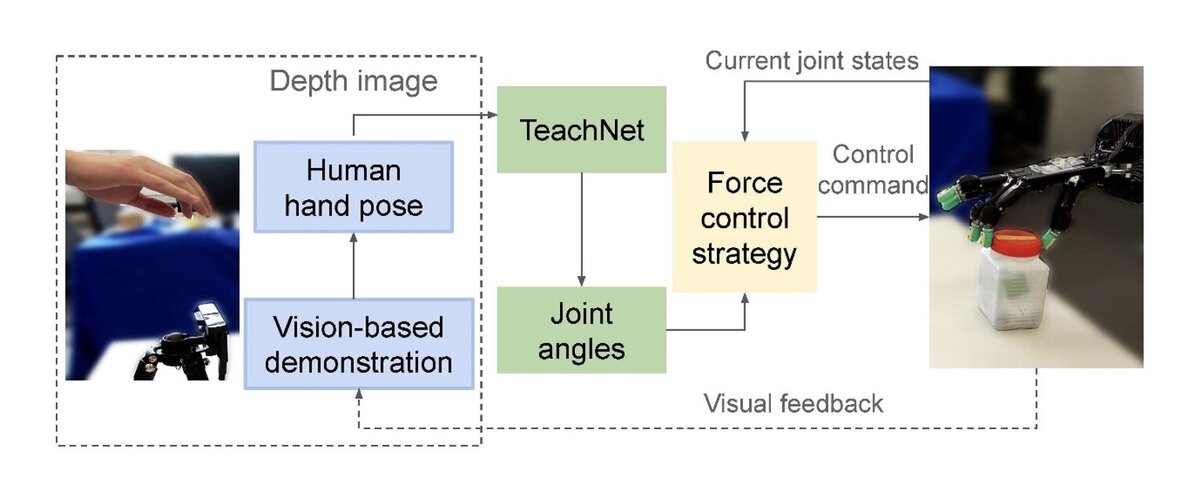
Важным моментом при обучении робота является умение прикладывать к предмету необходимое усилие. Важно, чтобы оно было точно оценено: если усилие слишком большое, - хрупкий предмет будет раздавлен, если недостаточное, - робот просто предмет уронит. На низком уровне рука робота снабжена набором датчиков давления, которые позволяют считывать информацию о предмете при касании. Но кроме того, система наблюдает позу человека, характер движения руки, угол сгиба локтя, положение кисти. Эта информация также обучает нейросеть. И робот может воспроизвести движение человека.
Авторы статьи проверили свой подход в серии тестов, как в симуляции, так и в реальных условиях с использованием Shadow hand, - роботизированной системы, которая напоминает человеческую руку как по размеру, так и по форме. Результаты были признаны "очень многообещающими"
Ученые считают, что в будущем новый подход поможет роботам-гуманоидам улучшить навыки работы руками и пальцами.