Как только мне в руки попал редуктор на базе МЭО, встал вопрос, а чем же управлять этим редуктором?
Поиски в интернете привели меня на страничку Сергея Василенко, где было небольшое видео о работе сего устройства, посмотрев на его работу подумал это то что надо. Страничка Сергея в YouTube Sergey Wasilenko (https://www.youtube.com/watch?v=qozhqUeRtiM&t=41s) За что ему огромное СПАСИБО за конструкцию и поддержку проекта.
Схема контроллера поворотки
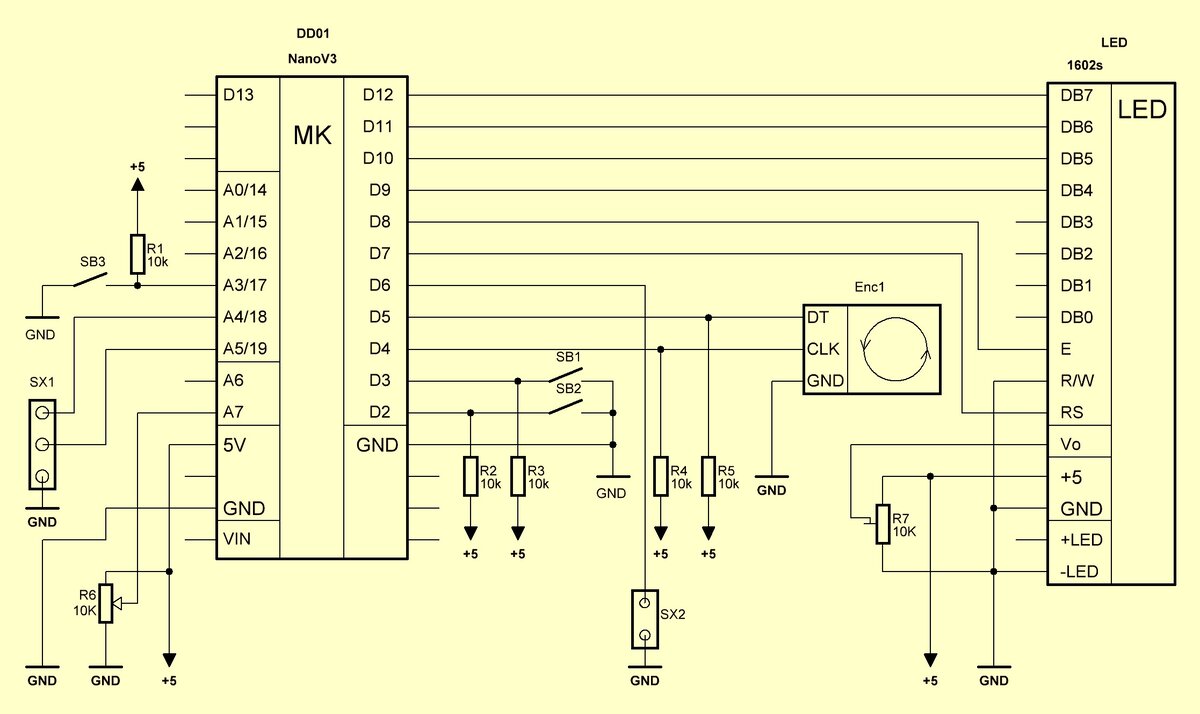
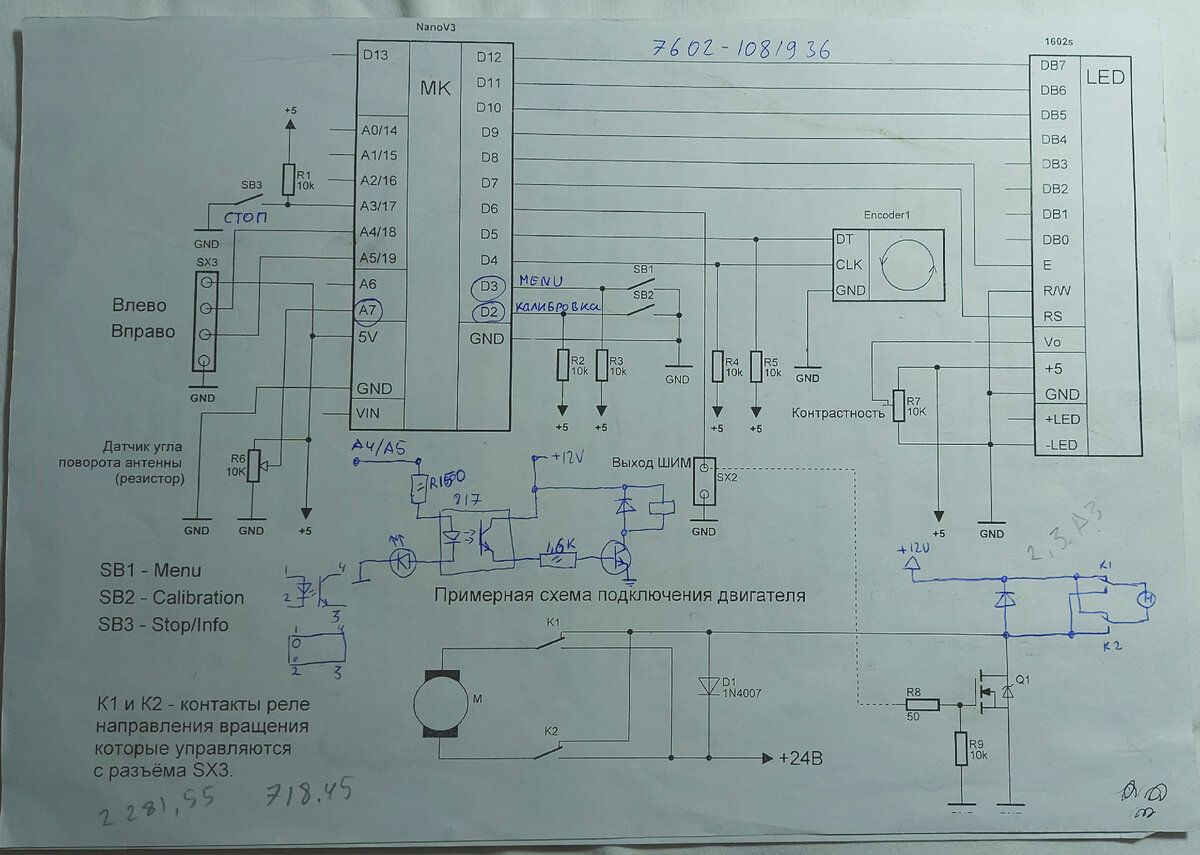
Схема контроллера с доработками
Были добавлены оптроны для развязки Arduino от силовой части.
Печатная плата контроллера.
Можно конечно было собрать всё на компонентах с Aliexpress, модуль с реле например. Но его не было в наличии а реле от бесперебойников целая куча .
Корпус
Первое что попалось под руку это корпус от блока питания приборов КИПиА. Внутренности БП были извлечены и на их место смонтирован контроллер. Силовые транзисторы- 2 шт на всякий случай установил на изолированный радиатор. Выглядит всё по колхозному но главное работает.
Для устранения помех по питанию поставил блокировочный плёночный конденсатор. Без него в АМ модуляции можно было слышать как жужжит моторчик привода.
Для сигнализации работы оптронов направления установлены светодиоды.
На клемник резистора азимута антенны подключена обычная витая пара, резистор проволочный от задвижки. Можно поставить любой ПП3 например.
Мордочка готовой конструкции
Навигация по меню
- main Const - Главная константа. Формирует небольшую коррекцию времени работы ШИМ на максимальной мощности (max PWM) для более корректной остановки. Может быть от -20 до 20 градусов. По умолчанию – 0.
- max PWM – Максимальный уровень ШИМ. Уровень ШИМ который поддерживается от окончания нарастания ШИМ до начала спада ШИМ. Может быть от 50 до 100%. По умолчанию – 100.
- min Angle– Минимальный угол выше которого отдаётся команда на поворот. Может быть от 1 до 99 градусов. По умолчанию – 3.
- PWM Angle – Угол при превышении которого будет включен плавный поворот. Может быть от 1 до 360 градусов. По умолчанию – 15.
- PWM small – Уровень ШИМ который будет использован при повороте на малый угол (меньше PWM Angle). Может быть от 6 до 100 процентов. По умолчанию – 40.
- Step Az. – Шаг приращения азимута при вращении ручки энкодера в основном режиме. Может быть от 1 до 10 градусов. По умолчанию – 2.
- RESET ALL – Сброс всех настроек (кроме настроек калибровки) к значениям по умолчанию. Может быть – NO или YES.
Правила пользования
Сразу после включения происходит инициализация дисплея, обнуление состояния реле поворота, считывание настроек из ППЗУ (EEPROM) и проверка текущего азимута антенны. После этого мудрая штуковина переходит в основной режим работы. В этом режиме в верхней строке дисплея мы можем наблюдать – AZIMUTH 21° PWM. Это означает что текущий угол поворота антенны равен 21 градус. Ниже надписи PWM в режиме поворота будет показан текущий уровень ШИМ в процентах. На второй строке наблюдательный пользователь может заметить надпись – TARGET 21°. Тут пишется целевой азимут который меняется вращением ручки энкодера.
После задания целевого азимута энкодером происходит следующее чудо… Если разница целевого и текущего угла меньше min Angle, то ничего не происходит. Если разница больше минимального угла необходимого для поворота но меньше PWM Angle, то шайтан-арба задействует режим поворота на малый угол. При этом ШИМ будет равен PWM small от начала и до конца поворота. То есть он будет постоянным. А вот если угол поворота будет больше PWM Angle, то по воле Аллаха и моему хотению произойдёт включение режима плавного поворота. В этом случае ШИМ плавно возрастёт от нуля до значения max PWM, какое-то время продержится постоянным а затем начнёт падать к нулю до самого останова вращения этого адского механизма. За ходом поворота можно наблюдать просто смотря на дисплей, там всё будет отображено.
При необходимости экстренно прервать поворот (пришла жена, загорелась плита) нужно просто нажать на кнопку STOP. И тогда ШИМ плавно опустится к нулю и там останется до тех пор пока в вашу голову не придут другие прекрасные идеи.
При нажатии на STOP в основном режиме на дисплей на некоторое время выскочит информация о всех текущих настройках. И тогда можно ими полюбоваться.
Калибровка
Кнопка "menu", на дисплее - GET 0, ставим антенну в положение нуля, кнопка "cal", на дисплее - GET 360, ставим в положения 360, кнопка "cal", на дисплее снова GET 0, если ноль править уже не надо (выставлен уже) сразу завершаем - кнопка "menu".
Ну всё вроде. Дальше сам.
Прошивка, инструкция и всё остальное на диске автора!
Видео работы устройства Сергея
73! 55!