Ученые разработала стратегию, позволяющую роботом «думать на несколько шагов вперед» — иначе говоря, робот учится предсказывать, что люди собираются сделать в ближайшее время.
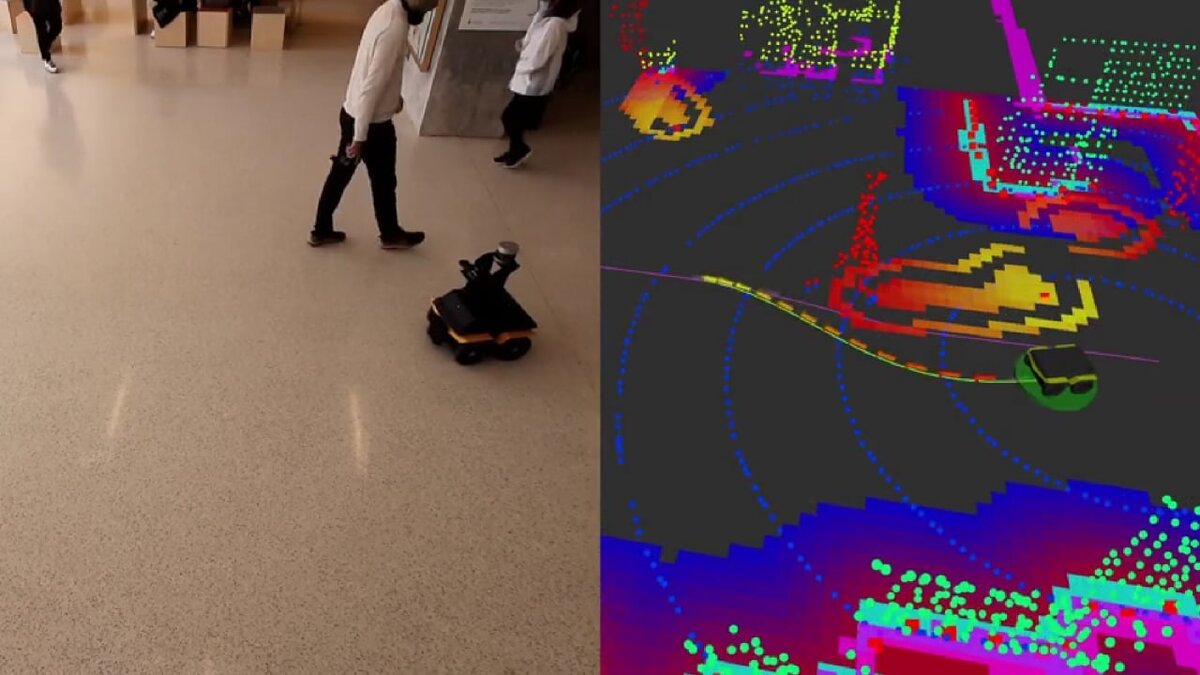
Чтобы решить, куда двигаться, робот использует пространственно-временные сетки занятости (SOGM), которые включают будущую информацию о динамических сценах. В качестве входных данных используются трехмерные лидарные кадры. Автоматизированный процесс генерации создает достоверные SOGM из предыдущих навигационных данных, основываясь на аннотировании лидарных точек на основе их динамических свойств, которые затем проецируются на двумерные сетки с отметками времени.
Вся система полностью самоконтролируема — это позволяет роботам учиться, учиться и еще раз учиться на протяжении всей их «жизни».
Когда люди перемещаются в пространстве, они могут торопиться, резко остановиться или развернуться. Чтобы предугадывать такое поведение, сеть использует технику обучения с самоконтролем. Она ориентировано на точки, а не на объекты, поэтому имеет более точную интерпретацию необработанных данных датчиков, что позволяет делать мультимодальные прогнозы. В этом ее отличие от обучения с подкреплением, представляющего собой «черный ящик», в котором связь между входными данными (тем, что «видит» робот) и выходными данными (действиями робота) неочевидна.
Проще говоря, используя обучение с подкреплением для решения поставленной задачи, потребовались бы многократные столкновения роботов и людей, чтобы первые методом проб и ошибок рано или поздно выработали бы оптимальную стратегию поведения со вторыми. Обучение с самоконтролем не требует таких жертв — бодаться вхолостую с людьми роботу не придется.