Исследователи из Чжэцзянского научно-технического университета и Университета Эссекса разработали метод обучения с подкреплением, который можно использовать для управления движениями автономного одноногого робота, похожего на бобра.
Такие подводные роботы представляют собой нелинейные системы — их движения предполагают сложную гидродинамику. Поэтому точное моделирование их движений может быть очень сложной задачей, требующей значительных вычислительных ресурсов.
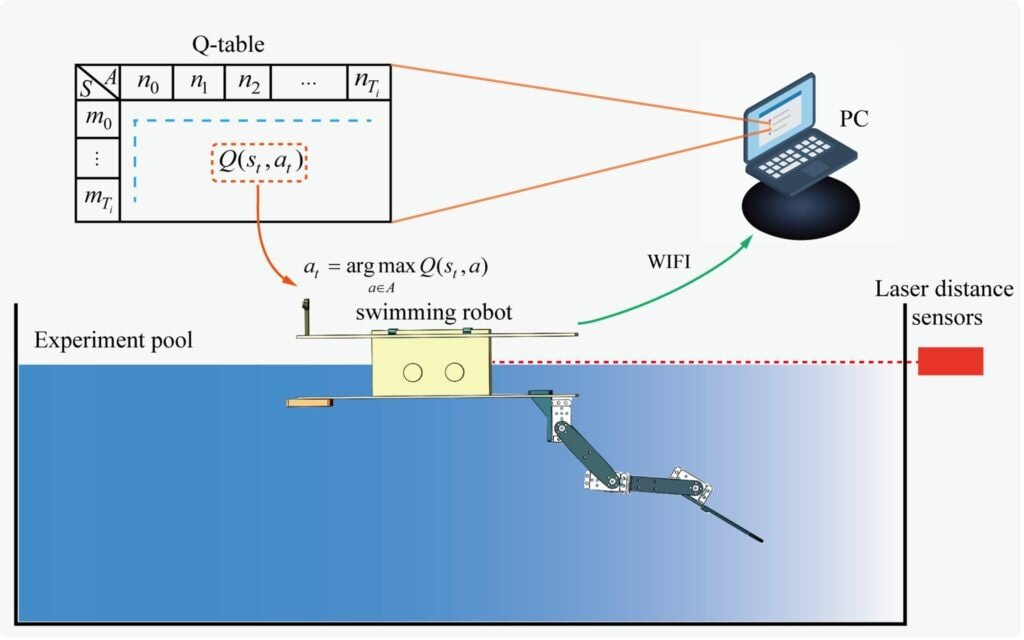
Новый подход, в отличие от других моделей управления подводными роботами, не требует интеграции сложных моделей движения, основанных на гидродинамике. Этого удалось добиться, взяв за основу работу суставов, отвечающих за плавание, у бобров. Это облегчает обучение модели и уменьшает неэффективные движения робота во время обучения.
«Основное преимущество нашего метода в том, что он не требует сложных моделей управления движением», — отмечает Ганг Чен, один из авторов разработки.